永磁同步直线伺服系统的纹波推力补偿
2014-01-16卢少武唐小琦周凤星解传宁
卢少武,唐小琦,周凤星,解传宁
(1.武汉科技大学教育部冶金自动化与检测技术工程研究中心,430081,武汉;2.华中科技大学国家数控系统工程技术研究中心,430074,武汉)
永磁同步直线电机因具有高速度、高精度和大 推力等优势,在高档数控机床和工业自动化等领域得到了广泛应用[1-2]。由于省去了中间机械变换环节,对比于旋转电机,永磁同步直线电机更容易受到外部干扰的影响,从而使其自身具有更为明显的非线性特性,直接造成永磁同步直线伺服系统的失稳和性能的下降。其中,纹波推力是影响永磁同步直线伺服系统性能的主要因素,特别是在低速运行的时候。为了实现高精度的位置控制,永磁同步直线伺服系统需要具有良好的抗扰动能力来对纹波推力进行抑制。
纹波推力可以表达为与动子位置函数相关的多个正弦函数之和[3]。由于其各个正弦函数的幅值和频率均未知,因此在永磁同步直线电机运行过程中,很难直接对纹波推力进行精准补偿。随着控制理论研究的日益发展,人们提出了从经典控制到现代控制的各种抑制纹波推力的方法。文献[4]阐述了一种典型方法去消除纹波推力,但是只有当永磁同步直线电机运行在特定轨迹时这种方法才有效,由于纹波推力模型复杂,因此很难在实际应用中完全得以抑制;文献[5]提出了一种基于B样条自适应前馈控制器去补偿纹波推力,但是当永磁同步直线电机高速运行时,该方法的补偿效率明显降低;文献[6]提出了一种基于扰动观测器的纹波推力补偿策略,为了提高补偿效果,采用基于BP算法的前馈神经网络去进一步逼近和抑制纹波推力,但是该方法计算量较大,在实际系统中无法保证其实时性。
为了有效地抑制纹波推力,本文首先采用快速傅里叶变换离线获得纹波推力的特征频率,从而简化纹波推力的数学模型,再通过递推最小二乘算法对纹波推力模型参数进行在线辨识,结合纹波推力的特征频率和模型参数,最后将纹波推力估计模型用于组建纹波推力前馈分量,从而对永磁同步直线伺服系统进行实时补偿。实验结果验证了所提方法抑制纹波推力的有效性和可行性。
1 直线伺服系统位置环模型分析
永磁同步直线伺服系统位置环的基本任务就是按照给定的运动轨迹实现准确的位置跟踪和定位,使位置输入和位置输出之间的偏差不超出允许的范围。为了将纹波推力的影响变得更为显著,本文采用一种双环控制结构(电流环和位置环)来验证抗扰动策略对永磁同步直线伺服系统性能的改善。在高性能永磁同步直线伺服系统中,电流环通常需要保证精准的电流控制,在其带宽范围内,电流环可近似为电流放大器,故永磁同步直线伺服系统位置双环控制结构可如图1所示[6]。

图1 直线伺服系统位置双环控制结构图
因此,永磁同步直线伺服系统位置环被控对象和纹波推力的数学模型通常可以简化为[7]

式中:θf为直线电机实际位置;iqr为期望的推力电流;kf为直线电机的推力常数;M为直线电机动子总质量;B为摩擦力系数;frip为纹波推力;fload为负载力;Gpos(s)为位置环P控制器;ω为纹波推力特征频率;A1和A2是待辨识的变量。
由于实际的永磁同步直线伺服系统为离散系统,采用零阶保持器对式(1)进行离散化处理,在不考虑负载力影响的情况下,永磁同步直线伺服系统位置环被控对象的差分方程可表达为
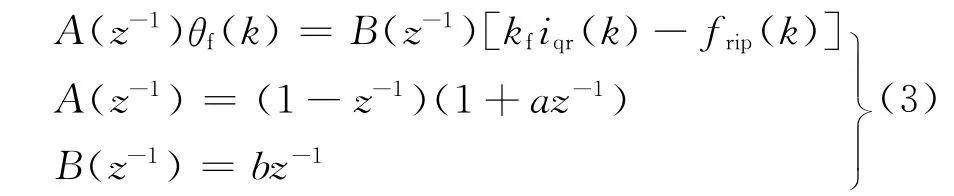
式中:a和b是待辨识的模型参数。
2 纹波推力在线补偿
2.1 纹波推力特征频率的离线提取
当永磁同步直线伺服系统位置环被控对象线性收敛时,可以通过辨识策略对纹波推力中正弦函数的幅值进行有效估计,但纹波推力中确定正弦函数的特征频率依然存在一定的困难。一种简单且有效的方法是频率分析方法[7]。需要强调的是,纹波推力的数学模型是关于永磁同步直线电机实际位移的函数,与永磁同步直线伺服系统运行时间并没有直接关系。当永磁同步直线电机以较低速度且匀速运行过程中,位移和系统运行时间将存在一个简单的线性关系,并且纹波推力的频谱与推力电流的频谱大致相同。
设定永磁同步直线电机的运行速度恒为8mm/s时,永磁同步直线伺服系统推力电流iqr如图2所示。对该推力电流数据直接进行快速傅里叶分析[8],可得到该推力电流的频谱,如图3所示。
从图3中可以看出,推力电流的特征频率为0.325Hz,尽管还有其他谐波信号出现在频谱中,但它们的幅值最多也只有推力电流特征频率幅值的10%左右,故在纹波推力数学模型中可以只考虑特征频率成分。为了将纹波推力与位移的函数转换为纹波推力与时间的函数,纹波推力特征频率对应的主要位移周期为0.040 6mm-1。因此,该纹波推力的数学模型式(2)可以进一步表示为

图2 匀速运行时的推力电流

图3 推力电流的频谱
2.2 纹波推力模型参数辨识
结合式(3)和式(4),得到含纹波推力的永磁同步直线伺服系统位置环被控对象的近似模型为

为了从被控对象近似模型辨识结果中得到该永磁同步直线电机的纹波推力,需要对被控模型参数a、b、A1和A2进行在线辨识。递推最小二乘算法的表达式为[9]


式中:α*为遗忘因子。
2.3 纹波推力前馈补偿
在永磁同步直线电机低速且匀速运行时,为了满足高精度定位要求,永磁同步直线伺服系统位置环控制器主要包含反馈控制量和前馈控制量。反馈控制量经过一个纯P控制器,主要负责永磁同步直线伺服系统位置控制的稳定性,前馈控制量则用来补偿纹波推力。那么,永磁同步直线伺服系统位置控制总的控制量为

纹波推力前馈补偿结构如图4所示。通过读取永磁同步直线伺服系统位置环被控对象输入、输出数据,对该被控对象模型参数进行实时辨识,然后将辨识结果直接用于纹波推力进行前馈补偿。
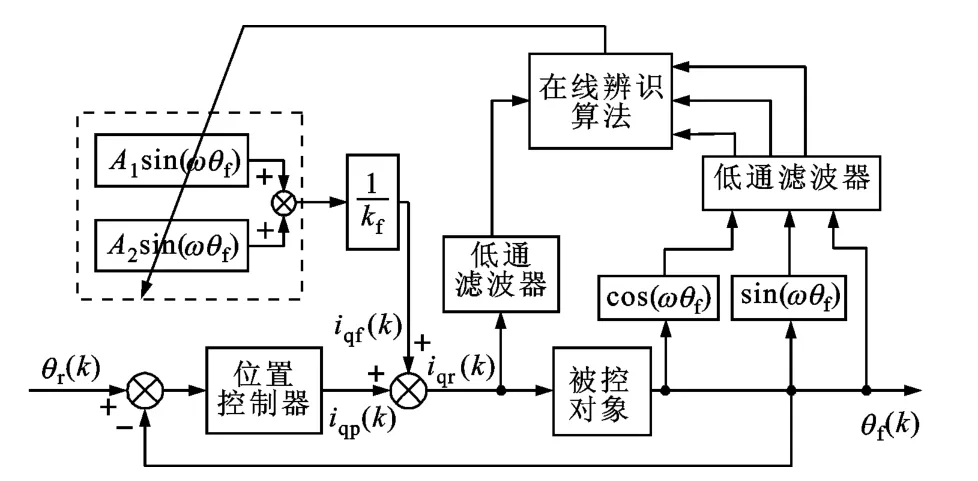
图4 纹波推力前馈补偿结构图
在读取永磁同步直线伺服系统位置环被控对象输入、输出数据过程中,推力电流和实际位置不可避免存在着噪声,这样一阶低通滤波器设计为
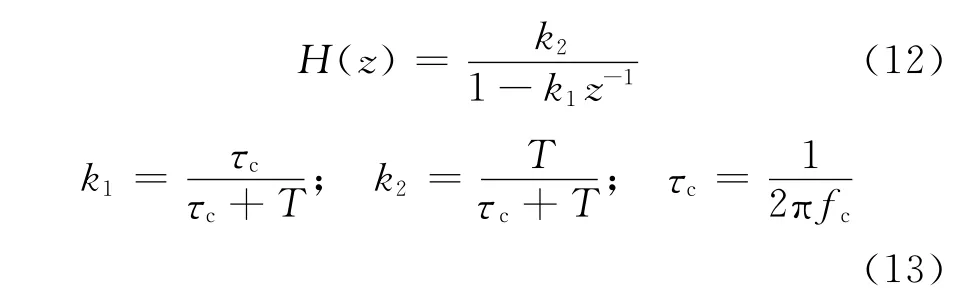
式中:T为系统采样时间;fc为直线伺服系统截止频率。
3 实验验证
实验平台主要包括3个组成部分:①一台电脑和一块数据采集板卡,数据采集板卡的采样时间可以灵活调节,最小采样时间为1ms;②一台伺服驱动,伺服驱动的控制核心主要由一块数字信号处理芯片(DSP)和一块现场可编程门阵列芯片(FPGA)来实现,其中DSP主要实现位置和电流二环控制,FPGA主要实现绝对式光栅尺协议和国产总线NCUC-Bus协议的解析;③一台永磁同步直线电机,相关电机参数如表1所示,永磁同步直线电机上光栅尺型号为LC183,其分辨率为10nm。整个永磁同步直线伺服系统平台如图5所示。主机通过数据采集板卡给伺服驱动发送位置环前馈控制量相关参数,同时接收推力电流和永磁同步直线电机实际位置。递推最小二乘算法在主机软件环境中实现。

表1 永磁同步直线电机额定参数

图5 纹波推力补偿实验平台
采用递推最小二乘算法进行模型参数辨识,其中遗忘因子α*=0.9。永磁同步直线伺服系统的位置指令为斜坡信号,其对应的速度可近似为低速且匀速指令。
图6和图7为基于递推最小二乘算法的纹波推力模型参数在线辨识结果,图8和图9为补偿前后的永磁同步直线伺服系统位置跟踪误差。其中,图8为没有任何补偿情况下的跟踪误差,图9为基于纹波推力自适应补偿的跟踪误差。从图中可以看出,在没有纹波推力补偿情况下,永磁同步直线伺服系统控制性能受纹波推力的影响比较大,最大位置跟踪波动误差为50μm左右;通过对纹波推力进行辨识并对永磁同步直线伺服系统进行在线补偿,随着递推最小二乘辨识模型参数的收敛,最大位置跟踪波动误差不到20μm,永磁同步直线伺服系统的位置跟踪性能得到明显改善。
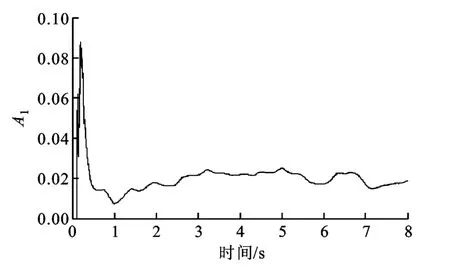
图6 纹波推力系数A1的辨识过程
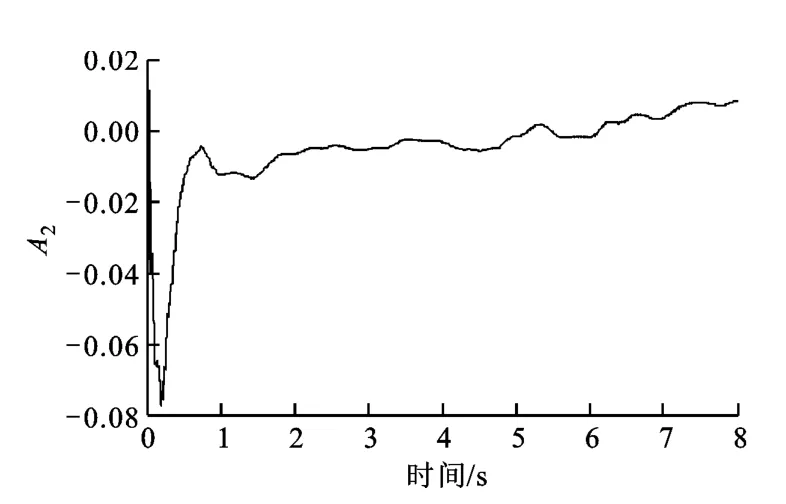
图7 纹波推力系数A2的辨识过程
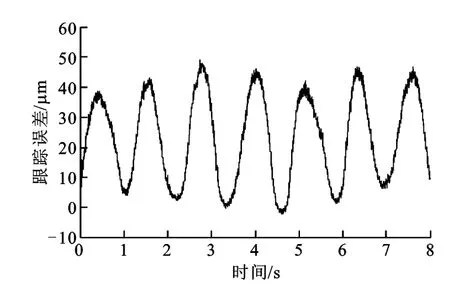
图8 补偿前的位置跟踪误差

图9 补偿后的位置跟踪误差
4 结 语
针对纹波推力对高性能永磁同步直线伺服系统的影响,本文主要提出了一种基于纹波推力自适应补偿的直线伺服系统位置控制策略。首先针对纹波推力呈现出一定的周期特性,采用信号分析手段离线提取纹波推力的特征频率,接着采用递推最小二乘算法在线辨识纹波推力的模型参数,最后将纹波推力估计模型直接应用于永磁同步直线伺服系统。经过对一台有铁芯大推力永磁同步直线电机的实验研究表明,离线提取其特征频率和在线辨识其模型参数能对纹波推力进行有效地估计,自适应补偿也能很好地抑制纹波推力,最大位置跟踪波动误差从补偿前的50μm左右降到补偿后的不足20μm。同时,整个系统的实现过程较为简单,且不依赖永磁同步直线电机的电气参数,对实现高性能永磁同步直线伺服系统的研究具有一定的启发意义。
[1] LIU Lijun,SHEN Yi,DOWELL E H,et al.A general H∞fault tolerant control and management for a linear system with actuator faults [J].Automatica,2012,48(8):1676-1682.
[2] 杨晓君,赵万华,刘辉,等.直线电机进给系统机械系统动态特性研究 [J].西安交通大学学报,2013,47(4):44-50.
YANG Xiaojun,ZHAO Wanhua,LIU Hui,et al.Dynamic characteristics of mechanical system in linear motor feed system [J].Journal of Xi’an Jiaotong University,2013,47(4):44-50.
[3] CHEN Si-Lu,TAN K K,HUANG Sunan,et al.Modeling and compensation of ripples and friction in permanent-magnet linear motor using a hysteretic relay[J].IEEE/ASME Transactions on Mechatronics,2010,15(4):586-594.
[4] YAO Bin,XU Li.Adaptive robust motion control of linear motors for precision manufacturing[J].Mechatronics,2002,12(4):595-616.
[5] OTTEN G,DE VRIES T J A,VAN AMERONGEN J,et al.Linear motor motion control using a learning feedforward controller[J].IEEE/ASME Transactions on Mechatronics,1997,2(3):179-187.
[6] ZHANG Dailin,CHEN Youping,AI Wu,et al.Precision motion control of permanent magnet linear motors[J].Int J Adv Manuf Technol,2007,35:301-308.
[7] ZHAO S,TAN K K.Adaptive feedforward compensation of force ripples in linear motors [J].Control Engineering Practice,2005,13(9):1081-1092.
[8] YE Shanglin,ABOUTANIOS E.Efficient 2-D frequency and damping estimation by interpolation on Fourier coefficients[J].IEEE Signal Processing Letter,2013,20(2):137-140.
[9] LU Shaowu,TANG Xiaoqi,SONG Bao.An adaptive GPC-based PIF controller in speed control design for PMSM [J].Sensors,2013,23:175-192.
