电机转子位置传感器的评述与发展趋势
2014-01-13邓智泉胡荣光
王 骋,邓智泉,蔡 骏,2,胡荣光
(1.南京航空航天大学,南京210016;2.谢菲尔德大学,英国 谢菲尔德S1 3JD)
0 引 言
随着自动化程度的提高,电机在工业、农业等领域均得到广泛应用。航空航天、油田采矿等对成本、温度、体积等有特殊要求的应用场合催生了新型电机的产生,如开关磁阻电机、永磁同步电机、无刷直流电机等。不同于传统的直流电机,这些新型电机都需要转子的位置信息才能稳定高效运行。
转子的位置检测方法总体上分为两种:传感器检测技术及无位置传感器技术。前者指在电机上安装一套专门的位置检测传感器检测转子位置;后者则通过测量电流、电压、磁链等物理量,利用这些量与转子位置的关系间接获得位置信息。无位置传感器技术去除位置传感器,简化了系统结构,降低了成本,但控制算法复杂,精度难以保证,存在起动困难、动态性能不理想,运行转速范围小等缺点。因此在工程应用中采用位置传感器检测转子位置更为普遍。近年来,从航空航天、数控机床等自动化设备的转角测量到家用电器、电脑磁盘等领域的测量控制,位置传感器均起到了不可或缺的作用。
由于电机控制方法各异及各类环境对转子位置信号获取的要求不同,故有必要了解传感器的工作原理及适用范围。合理选用位置传感器不仅可提高电机控制效果,还能延长电机使用寿命,降低成本。
1 常见的位置传感器
位置传感器按装配结构可分为接触式与非接触式两种。非接触式相比接触式减少了摩擦,能更准确地消除机械配合造成的影响,因此应用更为广泛。常见的非接触式位置传感器包括光电式、霍尔式、磁阻式、电涡流式、旋转变压器等。从现有文献来看,这些传感器各有优缺点,但无一类能适用于所有应用场合。因此对位置传感器进行分类总结,在工程应用上具有一定的参考价值。
1.1 光电式
光电式传感器一般由光源、光电码盘和光电元件三部分组成。图1 为光电式传感器的结构,其基本原理是随着电机转子的转动,码盘不断地遮挡或通过LED 发出的光线至光电传感器,使其输出高低电平,从而将转子的机械位置信号转化为电信号。码盘可根据实际需求确定形状及制作工艺。若应用于开关磁阻电机、无刷直流电机等对实时位置信号要求不高的电机,采用遮光片即可满足位置检测需要;若应用于永磁同步电机等需转子实时位置信息的电机,多采用光栅制作齿盘,增加转子位置的检测精度[1-2]。

图1 光电位置传感器位置测量原理图
光电式传感器按大类可分为增量式及绝对式,其主要区别在于码盘结构。增量式齿盘结构如图2(a)所示,码盘上的刻线分布均匀。每转过一个刻线,传感器输出一个脉冲,通过基准位置后对脉冲计数检测转子位置。与此同时,通过增加传感器的个数,使各传感器的输出成一定相差(如图3 所示两路光电传感器的输出),可提高传感器系统的检测精度。增量式光电传感器的优点是结构简单,易于小型化,缺点是掉电后无法确定初始位置,且存在累积误差[3]。

图2 增量式和绝对式光电码盘

图3 增量式光电传感器两路输出波形
绝对式码盘一般采用二进制编码,如图2(b)所示。码盘上透光道按特定的规律排列,每一个角度分辨率内均对应一个二进制数,在不同的位置下,传感器输出不同值反映位置。通过增加二进制数的位数即可提高该位置传感器的检测精度。绝对式位置传感器输出的是关于角度的单值函数,解决了增量式掉电后无法启动的问题,在国防、航空航天上得到了广泛应用。但其制造工艺较为复杂,增加了成本,不利于小型化[4]。
近年来,国内外学者通过优化码盘结构,减小绝对式光电传感器的体积,使得该传感器得到了更加广泛应用[5-7]。
多数光电式传感器为开关型输出,即传感器输出为高低电平的数字量,文献[8]将模拟输出的光电传感器应用于电机控制。该方法在转子上安装了渐变色转盘,通过光电式传感器输出的模拟信号检测转子位置。模拟输出的光电式传感器对于电机控制可有更高的灵活性,但其码盘制造较为复杂,位置检测的精度难以保证。
由光电式传感器的工作原理可知,其优点在于结构简单、输出精度高、反应快,因此具有较为广泛的应用前景。但光电式传感器的光敏元件易受环境温度的影响,且在油污、粉尘等环境中检测效果会有所降低,故在油田采矿、火力发电等恶劣条件下难以应用。
1.2 霍尔式
基于霍尔效应的器件称为霍尔传感器,其具体原理如图4 所示。将电流I 通入薄片状的霍尔器件,竖直施加强度为B 的磁场,产生的洛伦兹力,使得载流子发生运动,元件的边缘分别有电荷积聚,产生霍尔电场EH。稳态时,载流子的作用力相互抵消,恢复原来的运动方向,它使霍尔元件两个边缘产生电位差,称为霍尔电压UH。

图4 霍尔效应原理图
按照不同的输出信号形式,霍尔传感器有开关型和线性霍尔两种。前者输出高低电平的数字量,常通过计数测量信号;后者输出模拟量,其大小与磁场强度成正比[9]。
开关型霍尔传感器具有波形清晰、无抖动、无回跳、位置重复精度高、输出为数字量等特点。利用它可将大部分非磁的信号(压力、位置、角度等)转变为电量来检测和控制[10]。
开关型霍尔传感器受制于磁性转子的结构,无法达到较高的检测精度。但其体积小、造价低,在某些工程应用中有不可替代的作用。若电机控制需要更为精确的位置信息,可采用细分算法获取更为精确的位置信号[11-13]。
线性霍尔传感器输出正比于磁场强度的电压,故能实时检测随转子位置变化的磁场,从而提取转子位置信号。其具体工作原理:气隙磁场随转子转动为正弦变化,线性霍尔传感器将该信号输出,利用相关电路与算法对输出信号进行处理即可得到转子角度信息。该传感器分辨率差,但造价便宜,因此应用较为广泛[14]。

图5 线性霍尔位置传感器示意图[15]
图5 为常见的线性霍尔位置传感器示意图,H1~H4 为四个线性霍尔元件。该结构转子上是5 对极的永磁体,其形状经过特殊设计,在转子匀速转动时,线性霍尔传感器可输出正弦信号。四个霍尔传感器呈相差90°排列,经过反正切函数的解算即可得出转子位置。该结构只需两个霍尔传感器即可获得位置信号。文献[15]表明,增加霍尔传感器个数可有效抑制永磁体不对称造成的幅值、相位误差以及转子偏心影响。
霍尔传感器是感应磁场变化获取转子位置信息,因此理论上可直接利用永磁电机转子上产生的磁场检测位置,减小系统体积,如图6 所示。然而传感器输出受电枢绕组电流影响,会有相角滞后,且非正弦。文献[16]通过检测电流获得滞后角从而解算出实时角度。同时,引入卡尔曼滤波器以获取正弦信号,避免了传统滤波器的相角滞后,提高了检测精度。

图6 集成霍尔传感器的无刷直流电动机
然而,实际中霍尔传感器的估测信号会由于外界因素存在一定偏差。温度对线性霍尔传感器的霍尔系数影响较大,使得输出信号不能准确跟踪实际的磁场强度,影响了电机的控制效果。故在线性霍尔传感器设计时,常内部集成温度补偿电路。另外,该传感器的输出信号对磁场分布较敏感,故工程中对传感器安装位置也有一定的要求。若安装误差较大,检测到的磁场相角差不是设定值,会产生较大偏差。同时,线性霍尔传感器的模拟输出电压一般不高,易受电磁噪声干扰,故需设计合适的滤波电路来对输出信号进行处理。对于各种引起误差存在的因素,实际中均需采取一定的处理方式,才能得到准确的位置信息[17]。
霍尔传感器由于其独特的工作特性,可被封装在密闭环境中,适用于脏湿、粉尘等恶劣环境。与此同时,霍尔传感器常常需要永磁体或者励磁才可以工作,因此应用时需安装与转子同轴的含永磁体位置检测装置,这在一定程度降低了其体积小的优势。
1.3 磁阻式
磁性材料随外部磁场变化而相应改变阻抗的特性称为磁阻效应。磁阻式传感器就是根据磁性材料的这一性质而制成的测量用传感器,被广泛用于磁性齿轮转速、旋转方向的测量。磁阻材料多选用坡莫合金,其相对磁阻变化为2% ~3%。

图7 磁阻效应原理图
磁阻效应原理如图7 所示,若外磁场M 与合金内电流方向成一个角度α,会使得合金的电阻R 发生变化,其函数关系:

式中:R0为坡莫合金在未施加外磁场时的电阻值;ΔR0为坡莫合金的阻值绝对变化量。由式(1)可见,合金的电阻与磁场间是一个角度效应,适用于角度参数的测量[18]。
早在1992 年,就有学者将磁阻传感器应用于电机位置信号的检测[19]。检测装置原理如图8所示,

图8 磁阻传感器位置检测原理图
转子部分由四极永磁体构成,定子为连续排布的45°坡莫合金,连接方式为间隔串联。两条电路同时接入恒流源,输出电压:

式中:IR0可通过差分放大器消除,将上式相减放大可得:

输出电压为正弦曲线,可对应此时的转子位置信息。图8 的位置检测装置多适用于转子为四极的电机。若要将该装置应用于其它结构的电机,只需改变该装置的永磁体、坡莫合金极弧长度即可。
近年来,磁阻传感器的研究热点主要集中在巨磁阻效应(Giant Magnetoresistance,GMR)上[20-21],主要是由于传统磁阻材料电阻变化率最大为2% ~3%,而巨磁阻效应电阻变化率可达到50%,比普通磁电阻效应大了一个数量级,更有利于信号的处理及检测精度的提高。利用GMR 传感器的位置角测量系统如图9 所示。

图9 巨磁阻位置传感器[20]
GMR 传感器具有体积小、成本低、抗恶劣环境等一系列优点,使得它具有良好的发展前景。但GMR 作用机理等理论方面的研究仍不完善,目前对GMR 的研究仍在探索之中[22-23]。
磁阻式位置传感器与霍尔式相同,需永磁材料向其提供位置信号,这在一定程度上限制了磁阻式位置传感器的应用。
1.4 电涡流式
电涡流传感器由于其工作稳定、环境适应性强、无接触等特点,成为近几年较为热门的传感器,被广泛应用于无损检测、位移检测、位置检测。图10 为电涡流式传感器结构图,由探头线圈、延伸电缆、前置器三部分组成[24]。

图10 电涡流式传感器工作示意图
电涡流式传感器工作原理如图11 所示。当传感器探头线圈通以正弦电流i1时,空间内产生交变磁场H1,使金属导体表面产生一定的感应电流,即电涡流i2。与此同时,i2又产生新的交变磁场H2,其方向与H1相反,从而导致线圈的等效电阻发生变化。在金属导体的线圈激励电流的频率f、空间磁导率μ、线圈电阻率ρ 不变的情况下,线圈阻抗Z 为关于x 的单值函数。电涡流位置传感器便是通过这一性质设计的。
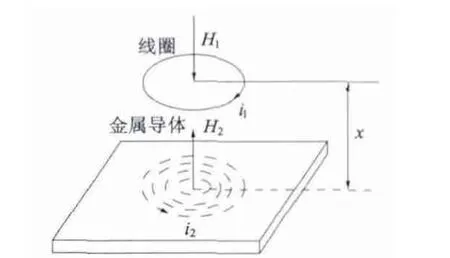
图11 电涡流效应工作原理
在测量转子位置时,只需在转子上加装一个齿轮状金属体,通过电涡流传感器检测金属表面与传感器的距离,即可测算出转子位置或转速[25],如图12 所示。

图12 电涡流式传感器位置测量方法图
电涡流位置传感器的激励线圈等效电感、与金属盘互感等参数会影响位置检测性能。优化设计的探头形状及金属体齿宽、槽宽可有效提高电涡流位置传感器的检测性能[26-27]。
电涡流式位置传感器适合在高温等恶劣条件下运行。如卡曼公司生产的高温位移传感器工作温度范围达到-195°C ~538°C,已广泛应用于核反应堆、涡轮机、火箭发动机等场合。
1.5 旋转变压器
旋转变压器是一种输出电压随转子位置角变化而变化的位置传感器,由于其结构坚固,受干扰较小,响应速度快,广泛应用于高温高速运行场合[28]。其缺点在于信号处理比较复杂,但随着最近几年解码芯片的发展,该问题已逐步得到解决。
传统旋转变压器的工作原理如图13 所示。在激磁绕组中通正弦电压,随着转子位置的改变,激励绕组与相互垂直的两个信号绕组(正弦绕组及余弦绕组)的耦合程度发生改变,从而使信号绕组的感应电势随转子位置按正余弦规律变化[29]。
图13 的旋转变压器激励绕组通过滑环和电刷连至变压器外部。这种旋转变压器检测精度较高,但受制于电刷和滑环等结构,运行速度和寿命等均受限制,目前应用较少。因此需要研发新结构的旋转变压器解决上述问题。

图13 传统旋转变压器原理图
最先想到的是使用永磁材料取代外部的电激励源。文献[30]所述旋转变压器由永磁体转子、定子铁心和信号线圈组成,但这种结构的旋转变压器由于需使用永磁材料,故未得到很好的研究推广。
美国和日本等国学者提出用耦合变压器实现无刷化,其具体结构如图14 所示。激励信号注入耦合变压器的定子,其转子与旋转变压器的转子同轴相连,这样就在旋转变压器的转子上施加了正弦信号。这种旋转变压器省去了滑环和电刷结构,安全性得以提高,但其体积增加、成本提高,结构也更加复杂,不利于加工生产[31]。

图14 带耦合变压器的旋转变压器结构图
磁阻式旋转变压器工作原理为通过一定的绕线方式以及转子结构,使气隙磁导随转子位置变化而变化,从而使信号绕组的感应电势幅值随之变化[32-34]。常见的磁阻式旋转变压器结构如图15 所示。其本质上是一种累加式位置传感器,位置检测精度与转子铁心的小齿数有关,数据处理方法与传统旋转变压器不同。

图15 传统变磁阻式旋转变压器
图16(a)是单极式变磁阻旋转变压器。这种旋转变压器利用了转子的凸极效应,激励绕组及信号绕组均绕制在定子齿上。当线圈以特定的方式排列,且转子设计成某些特定形状时,气隙磁导仅含有恒值及基波分量。在合理设计的基础上,激励绕组的气隙磁导不随转子位置变化而改变,而信号绕组的感应电势随转子位置正弦变化[35]。
图16(b)是多极式变磁阻旋转变压器。其工作原理与单极式相同,都是利用转子的凸极形状改变气隙磁导。所不同的就是转子的极数有所增加,当其应用于多极电机时,只需将转子极数与电机极数做到一致即可实时测得电角度。因此多极式变磁阻旋转变压器适合用于多极式电机的转子位置检测[36]。

图16 两种磁阻式旋转变压器结构图
由于旋转变压器对安装精度的要求很高,近几年出现了一种单极性等气隙结构旋转变压器,该旋转变压器本质上仍为磁阻式旋转变压器,其结构如图17 所示。由图中可见,激磁绕组及信号绕组均绕在定子上,其中激磁绕组水平嵌放在定子上、下齿之间,信号绕组套在定子的上、下齿上;转子由导磁环及不导磁的保护套制成,其旋转时即可改变激励绕组与信号绕组的耦合程度。实验证明该结构具有良好的抗机械偏心能力[36-37]。

图17 单极性等气隙旋转变压器结构图[37]
根据旋转变压器上的耦合关系,向激励绕组通入高频等幅交流电,相互垂直的两个副边,其中一个得到正弦包络的振荡波形,另一个得到余弦包络的振荡波形,波形如图18 所示[38]。图中由上至下分别为原边电压、转子转角、cosine 副边电压、sine 副边电压。

图18 旋转变压器波形图
根据图18 的波形,有多种方法可以求解转子位置。比如将两个副边电压峰值信号提取后,经A/D转化进DSP,利用反正切函数等运算得到转子转角信息[39]。
文献[40 -41]采用软件解算旋转变压器转子位置。其本质是电机控制、高频信号发生、位置信号采样用的是同一个DSP,使得三者的时间同步。为了简化结构可用方波注入。该方法具有低成本、算法简便等特点。
总体来说,磁阻式旋转变压器是旋转变压器的发展趋势。磁阻式变压器只在定子上绕有绕组,解决了传统旋转变压器绕线麻烦、磨损较大的问题,同时磁阻式旋转变压器结构轴向长度较小,节省了空间[42]。但磁阻式旋转变压器抑制谐波较麻烦,故该类旋转变压器设计较为复杂。
2 位置传感器应用分析
上文对常见的位置传感器分别从原理、装置结构等方面进行了阐述。在选用时需综合考虑工程的各项要求,下文将分析比较传感器的各项性能,为工程选用提供参考。
2.1 精度
检测精度是衡量位置传感器性能的重要指标。高精度的位置信息是实现电机精确、高效控制的重要因素。不同电机对位置信号精度的需求亦不相同,例如对于同步电机,精确的实时位置信息必不可少;而对于开关磁阻、无刷直流等方波驱动的电机,并不需要精确位置信号。故选用传感器时需考虑电机的控制精度要求。
获取精确的位置信号有两种方法,一种是硬件上的细分,例如采用光栅制作的光电码盘;另一种是采用模拟信号输出,例如线性霍尔传感器。前者在传感器的材料、加工上要求更高,但解算出的位置信号误差较小。后者输出信号的处理更为复杂,在处理过程中累计误差较多,可靠性不如前者。
综合比较各类位置传感器,光栅光电码盘的检测精度最为可靠。一方面由于光栅的制作工艺使得其对位置信号的细分更为密集;另一方面光电码盘输出数字信号,信号处理简单快速。因此光电码盘广泛应用于交流电机控制等对转子位置要求较高的场合。
2.2 体积
在航空航天等应用场合,体积大小亦为传感器选用的重要依据之一。体积需考虑三方面因素:位置传感器本身体积、与传感器配套的装置体积(如同轴码盘等)及检测电路的体积。
光电式传感器本身体积较小,检测电路简单,但需要配套设计与电机转子同轴的光电码盘。总体来说光电式传感器在体积方面有一定的优势。霍尔及磁阻传感器常用于永磁转子电机,这可以省去同轴装置。然而当其应用于非永磁转子电机时,该优势不复存在。与光电式传感器相同,霍尔及磁阻式传感器检测电路较为简单,可有效减少位置检测装置的体积。旋转变压器本身已包含同轴转子,就现有的研究成果来看,各国学者已可将旋转变压器的体积降至足够小。但旋转变压器的检测电路较为复杂,需要信号发生、检测比较等多部分电路,但解码芯片的出现一定程度上减少了检测电路的体积。电涡流式传感器本身体积较大,且需配合专门设计的同轴金属盘使用,难以压缩其体积。
综上所述,若只考虑传感器本身,霍尔、磁阻式体积更小,优势更大。然而工程中选用时需综合考虑检测电路体积等因素,因此要根据电机类型、应用场合选取总体体积最小的传感器系统。
2.3 环境适应性
在环境恶劣的电机应用场合,传感器检测时的环境适应性亦需多加考虑。由于检测原理的差异,各位置传感器适应环境的能力亦不相同。在传感器选用时需考虑温度、湿度、粉尘等因素。
光电式传感器检测光信号,在粉尘较多的情况下光信号传递易受阻挡,导致检测效果受干扰,无法反映转子位置。霍尔式及磁阻式传感器检测磁场,因此在强磁场条件下表现往往难以满足工程需求。与此同时,传感器有时需工作在高温环境中。较高的温度一方面会影响传感器中永磁体性能,另一方面霍尔、磁阻传感器会有较大的温漂现象。设计温度补偿电路可以解决该问题,但其可靠性会受到影响,检测效果不如其它的位置传感器。
不同于以上传感器检测外界的物理量(光、磁),电涡流传感器及旋转变压器检测的信号均为主动施加获得,因此信号检测受到环境影响较小。尤其在高温、高辐射环境下,这两种传感器的检测性能明显优于其他类型。在核电站、航空航天等环境恶劣、且不计成本的情况下,往往优先考虑电涡流传感器及旋转变压器。
2.4 成本
在大多数情况下,电机系统对于成本有一定的限制。位置传感器作为电机控制系统的重要组成部分,其成本亦成为选用时重要的考量标准。在保证系统要求的情况下,选用合适的传感器可有效降低系统成本,提高性价比。
一般来说,霍尔、磁阻这两种传感器制造工艺较为简单,成本较之其它类型传感器有较大优势。光电式传感器的成本需视码盘的检测精度而定,若精度要求较高,光栅制作工艺复杂,成本会有所提高。
电涡流式传感器由于其工作原理复杂,造价较高,但由于其良好的环境适应性,常用于航空航天等不太限制成本的场合。旋转变压器由于其信号处理较为复杂,解码芯片价格较高,在成本中占了很大的比重。
传感器的成本与其精度、性能有较大的联系。同类型的传感器精度越高、性能越强,成本势必越高。因此难以简单评判各传感器的成本优势孰高孰低。但在满足工程需要的前提下,合理选用传感器仍可有效降低成本,提高系统的性价比。
综上所述,现将上文所述位置传感器各项性能指标列于表1。表中,★的个数多,代表精度高、体积小、环境适应性强及成本低。工程应用中可根据具体应用场合的要求对照此表进行位置传感器的选择。

表1 各位置传感器性能优劣比较表
3 位置传感器的发展趋势
为进一步提高电机的控制效果,使其能够适应各类工程需求,还有一些重要的方向值得传感器研究机构及生产厂商探索研究。
3.1 高精度的位置传感器
在风力、潮汐发电等多极电机应用场合,每个电周期所对应的机械角度较小,往往需要位置传感器信号能够检测到更小的角度变化。且在姿态控制、电机伺服系统等场合,高精度的位置信号是精确控制电机的关键因素。因此,高精度是位置传感器的重要发展方向之一,也是提高电机控制效果,拓展新能源等新兴电机应用场合的重要因素。
3.2 位置传感器的故障处理能力
由于加工、老化、外界干扰等因素,位置传感器是电机控制系统中较为容易发生故障的部分。然而在航空航天、医疗、化工制造等对可靠性要求较高的领域,即使出现传感器故障,也要保证电机可靠运行。为此,具有容错性能、故障处理能力强的位置传感器系统能够尽可能地减少故障所造成的损失,提高电机的可靠性,拓宽电机的应用范围。
3.3 专用位置传感器信号处理芯片及电路
目前位置传感器的输出信号多通过DSP 等数字信号处理芯片解算位置及控制电机运行。然而这些芯片多为串行执行的,各片内资源容易相互影响。尤其在电机高速运行时,位置信号的解算在每个控制周期内占据了较多的时间,不利于电机的复杂控制及新型算法的应用。
专用位置传感器信号处理芯片及电路独立于电机控制系统,使位置解算与电机控制并行执行,可较好地满足复杂算法及高速情况下对于位置信号快速性及精确性的要求。因此,多功能、高可靠性的信号处理芯片及电路开发可有效提高电机的控制效率,拓宽电机的应用场合。
3.4 间接位置传感器
在潜艇推进器、微小电机等应用场合,位置传感器的引入会带来轴向长度增加、体积重量增大等问题。这些情况下传统的位置传感器已无法满足工程的需要。
近几十年来,诸如探测线圈、高频信号注入等间接位置检测方法为电机的位置检测提供了新的思路。这些方法虽然没有采用传统位置传感器,但仍然使用了电压、电流等传感器,因此仍可认为是传感器系统。从现有文献来看,还没有形成一整套可以完全代替位置传感器的间接位置检测方法。因此研究间接位置传感器技术对于拓展电机应用、提高电机控制的灵活性有着至关重要的作用。
4 结 语
位置传感器是电机控制系统的重要组成部分,选取价格合理、满足应用条件的转子位置传感器对电机性能及运用起到了不可或缺的作用。本文从工作原理、结构等方面进行了阐述,调研了各类位置传感器。与此同时,本文分析了某些应用场合位置传感器的性能表现,并根据电机的应用需求提出了位置传感器的发展方向,以期对电机位置传感器选用及研究提供依据。
[1] MAYER V,SCHNEIDER M,SEYBOLD J,et al.New high resolution optical incremental rotary encoder[C]//2008 2nd European Conference & Exhibition on Integration Issues of Miniaturized Systems - MOMS,MOEMS,ICS and Electronic Components(SSI).2008:1 -8.
[2] 梁立辉.高精度复合式光电编码器设计及分析[D]. 中国科学院研究生院(长春光学精密机械与物理研究所),2010.
[3] JOHNSON N,MOHAN K J.Optimization of incremental optical encoder pulse processing[C]//2013 International Multi - Conference on Automation,Computing,Communication,Control and Compressed Sensing (iMac4s).IEEE,2013:769 -773.
[4] ENGELHARDT K,SEITZ P.Absolute,high-resolution optical position encoder[J].Applied Optics,1996,35(1):201 -208.
[5] CRESPO D,BERNABEU E. Optical encoder based on the Lau effect[J].Optical Engineering,2000,39(3):817 -824.
[6] DUMBRǎ V N,SCHIAUA S.Possibilities to increase the resolution of photoelectric incremental rotary encoders[J].Materials Science in Semiconductor Processing,2000,3(5):557 -561.
[7] LIANG L,WAN Q,QI L,et al.The design of composite optical encoder[C]//9th International Conference on Electronic Measurement & Instruments.IEEE,2009:2 -642 -2 -645.
[8] AHN J W,PARK S J,LEE D H.Novel encoder for switching angle control of SRM[J]. IEEE Transactions on Industrial Electronics,2006,53(3):848 -854.
[9] 印友军.基于霍尔原理的非接触式位置传感器的研究与应用[D].上海:上海交通大学工程,2012.
[10] 徐鼎新.开关型霍尔集成传感器的原理与应用[J].计量与测试技术,2003(4):018.
[11] CAPPONI F G,DE DONATO G,DEL FERRARO L,et al. AC brushless drive with low resolution Hall-effect sensors for an axial flux PM machine[C]//Conference Record of the 39th IAS Annual Meeting.IEEE,2004,4:2382 -2389.
[12] CAPPONI F G,DE DONATO G,DEL FERRARO L. Brushless AC drive using an axial flux synchronous PM motor with low resolution position sensors[C]//Power Electronics Specialists Conference,2004 IEEE 35th Annual.IEEE,2004,3:2287 -2292.
[13] MORIMOTO S,SANADA M,TAKEDA Y. Sinusoidal current drive system of permanent magnet synchronous motor with low resolution position sensor[C]//Conference Record of the 1996 Thirty-First IAS Annual Meeting.IEEE,1996,1:9 -14.
[14] CHANG Y C,TZOU Y Y.Design of a digital servo control IC for permanent magnet synchronous motors with linear hall sensors[C]//IEEE Power Electronics Specialists Conference. IEEE,2007:599 -605.
[15] HU J,ZOU J,XU F,et al.An improved PMSM rotor position sensor based on linear Hall sensors[J].IEEE Transactions on Magnetics,2012,48(11):3591 -3594.
[16] SIMPKINS A,TODOROV E. Position estimation and control of compact BLDC motors based on analog linear Hall effect sensors[C]//IEEE American Control Conference. IEEE,2010:1948 -1955.
[17] 叶伟.适应于高速永磁电机的多模式转子位置检测技术研究[D].哈尔滨:哈尔滨工业大学,2010.
[18] 梁长垠.磁阻式传感器在角度测量中的应用[J]. 传感器技术,2005,24(4):79 -80.
[19] PULLE D W J,EIJKEL C J M,FLUITMAN J H J,et al. A new magnetoresistive based sensor for switched reluctance drives[C]//23rd Annual IEEE Power Electronics Specialists Conference.IEEE,1992:839 -843.
[20] LOPEZ-MARTIN A J,CARLOSENA A.Performance tradeoffs of three novel GMR contactless angle detectors[J].Sensors Journal,IEEE,2009,9(3):191 -198.
[21] QU B J,REN T L,LIU H R,et al.Dependence of GMR on NiFe layer thickness in high sensitive simple spin valve[J]. Sensors Journal,IEEE,2005,5(5):905 -908.
[22] 张海峰,刘晓为,王喜莲,等. 磁电阻效应的原理及其应用[J].哈尔滨工业大学学报,2008,40(3):362 -366.
[23] AUSSERLECHNER U. The optimum layout for giant magneto -resistive angle sensors[J]. Sensors Journal,IEEE,2010,10(10):1571 -1582.
[24] 廖亚琴. 电涡流传感器的仿真设计[D]. 成都:电子科技大学,2007.
[25] PRÉMEL D,MOHAMMAD - DJAFARI A. Eddy current tomography in cylindrical geometry[J]. IEEE Transactions on Magnetics,1995,31(3):2000 -2003.
[26] LI W,HUA Z,QIAN W,et al. Some considerations of eddy current proximity sensor applied for motor speed measurement[C]//IEEE International Conference on Electrical Machines and Systems.IEEE,2008:963 -967.
[27] BERNIERI A,BETTE G,FERRIGNO L. Characterization of an eddy - current - based system for nondestructive testing[J].IEEE Transactions on Instrumentation and Measurement,2002,51(2):241 -245.
[28] RADUN A V. High - power density switched reluctance motor drive for aerospace applications[J].IEEE Transactions on Industry Applications,1992,28(1):113 -119.
[29] SESHADRI A R M.A programmable logic device-based resolver simulator[J].Electric Machines & Power Systems,2000,28(7):651 -662.
[30] 胡仲华.无刷旋转变压器[J].微特电机,1980(1):7.
[31] 姜燕平. 多摩川旋转变压器原理及其解码[J]. 伺服控制,2007(1):23.
[32] HANSELMAN D C,THIBODEAU R E,SMITH D J. Variable -reluctance resolver design guidelines[C]//Industrial Electronics Society,15th Annual Conference of IEEE.1989:203 -208.
[33] KIM K C,HWANG S J,SUNG K Y,et al.A study on the fault diagnosis analysis of variable reluctance resolver for electric vehicle[C]//Sensors,IEEE,2010:290 -295.
[34] CUI S,HAO G.Stator structure design and analysis of variable reluctance resolver for hybrid-vehicle motor drive[C]//2012 7th International Power Electronics and Motion Control Conference.IEEE,2012,4:2587 -2592.
[35] SUN L,SHANG J,ZOU J. New absolute rotor - position sensors for inverter-driven motors[C]//INTERMAG Asia 2005.2005:975 -976.
[36] 徐谦.一对极等气隙磁阻式旋转变压器的研究[D]. 哈尔滨:哈尔滨工业大学,2008.
[37] JING S,CHENGJUN L,JIBIN Z.The analysis for new axial variable reluctance resolver with air - gap complementary structure[C]//International Conference on Electrical Machines and Systems.IEEE,2009:1 -6.
[38] RADUN A V,SESHADRI M.A programmable logic device based resolver simulator for motor control[C]//Proceedings of IEEE Southeastcon '99.IEEE,1999:159 -164.
[39] KONGHIRUN M. A resolver -based vector control drive of permanent magnet synchronous motor on a fixed-point digital signal processor[C]//2004 IEEE Region 10 Conference. 2004,500:167 -170.
[40] KHABURI D A.Software-based resolver -to -digital converter for DSP-based drives using an improved angle-tracking observer[J]. IEEE Transactions on Instrumentation and Measurement,2012,61(4):922 -929.
[41] HOU C C.A DSP-based resolver-to-digital conversion using pulse excitation[C]//IEEE,Energy Conversion Congress and Exposition.IEEE,2012:503 -508.
[42] 邢敬娓.新型磁阻式旋转变压器相关问题研究[D]. 哈尔滨:哈尔滨工业大学,2007.