光敏管阵列激光靶基于横截面积分的体积估算
2014-01-13赵冬娥王占选刘媛媛
王 磊,赵冬娥,刘 吉,王占选,刘媛媛
(中北大学仪器科学与动态测试教育部重点实验室,山西 太原 030051)
0 引言
体积估算是靶场测试中一项重要的测试指标,精确地体积估算结果为分析被测物体动能提供了重要的数据支撑[1]。
在过去的国内靶场测试中对运动物体进行体积估算的研究并不多[2-3],目前,最新提出的一种体积估算方法是:根据不同测量物体(长方体、柱体、球体)的形状利用其体积计算公式进行体积估算[1]。这种体积估算方法涉及的参数多,估算过程较繁琐。本文针对运动物体体积估算提出一种基于积分的体积估算方法。
1 光敏管阵列激光靶原理
光敏管阵列激光靶测试系统由起始靶和停止靶两部分组成,两靶平行且相距固定靶距,如图1 所示。起始靶和停止靶的硬件构成完全相同,图2为靶面的详细结构,左下角的O 作为坐标平面的原点,水平方向为X 轴,垂直方向为Y 轴。在X 轴和Y 轴上各有一组平行激光光幕,两组平行激光光幕交汇后到达对面与其平行的光敏管阵列,光敏二极管之间无间隙紧密排列。测试过程中,平行激光光幕开启并保持稳定,光敏管阵列都处于工作状态。没有物体经过时,每个光敏管都能接收到对面发射的激光,当有物体经过光幕交汇区时,遮挡部分光,被遮挡的光无法被X 轴和Y 轴方向上的光敏二极管探测到,使得电平转换电路的输出电平发生跳变,采集的数字信号也随之变化。

图1 测试系统示意图Fig.1 Schematic diagram of the test system
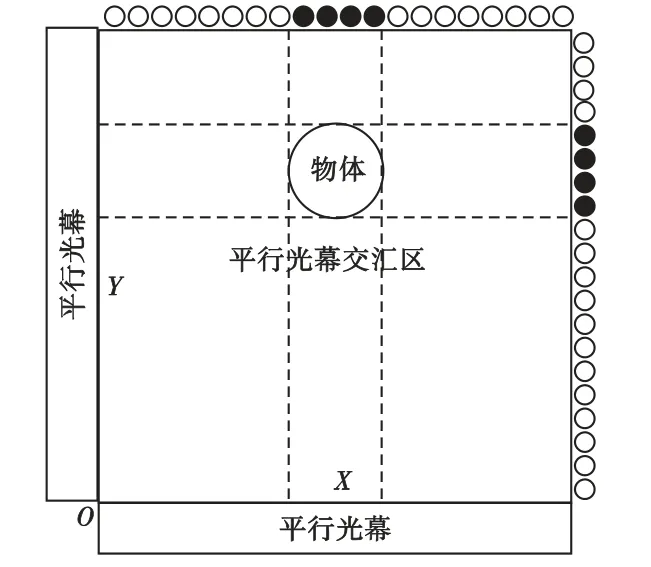
图2 平行光幕区Fig.2 Parallel screen area
最新提出的一种体积估算方法通过对柱体、双椎体、球体进行体积公式的推导对物体进行体积估算。这种体积估算方法存在以下缺陷:1)估算方法涉及的参数多,估算过程较繁琐;2)对运动物体规格要求较高,物体必须是柱体、双椎体、球体等非常规则的形状才能进行体积估算;3)当物体不是垂直入射时,该体积估算方法会产生较大误差。
2 基于横截面的体积估算
对于入射的规则形状物体,利用公式构造数学模型涉及参数较多且过程繁琐,通过在三维空间对每个采样时刻运动物体横截面进行积分可实现对物体体积的估算。
如图3所示,物体斜入射经过二维激光光幕时会在X 轴和Y 轴方向遮挡到达光敏管阵列探测器的光(以长方体为例),采集系统将每个采样时刻X轴和Y 轴上被挡光的光敏管的数量采集下来,根据遮挡的光敏管个数信息可得出物体遮挡激光光幕的横截面的直角边的长度(图3中加粗的直线),经计算可得该采样时刻下挡光截面的面积。
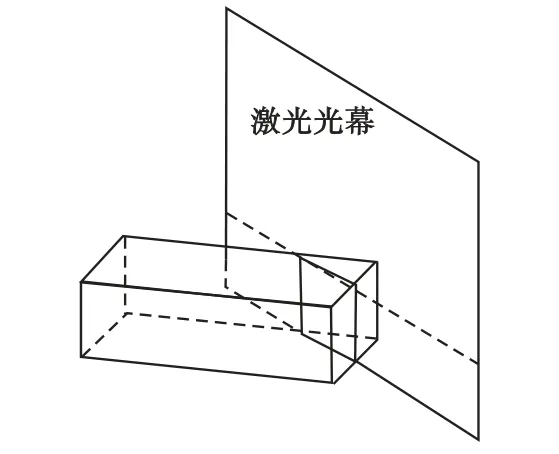
图3 斜入射情况下物体与激光光幕相对位置图Fig.3 The relative positions of the objects with Laserscreen in the case of oblique incidence
在某一采样时刻,物体经过光幕时横截面在X轴(Y 轴)的最大值l计算公式为:

其中n为被遮挡光敏管个数,l′为光敏管宽度。
如图4所示,运动物体经过光幕时在X 轴方向遮挡4个光敏管的光,在Y 轴方向遮挡3个光敏管的光,每个光敏管宽度为4mm,则物体X 轴长度为16mm,Y 轴长度为12mm。

图4 物体遮挡X、Y 轴示意图Fig.4 Schematic diagram of object obstructing the X,Yaxis schematic
依据物体的X、Y 轴方向的尺寸,可以计算出该采样时刻横截面为椭圆(包括圆)和长方体(包括正方体)的面积S,以物体在相邻采样间隔的间隔位移dL 作为积分元对所有采样时刻物体横截面积进行积分运算可计算得到物体体积V:

其中t0为物体进入激光光幕的时刻,t为物体离开激光光幕的时刻,dL 计算公式为:

其中v-为物体运动经过激光光幕时的平均速度,fs为采样频率。图5 为采样面积积分示意图,如图所示相邻两个采样横截面间的距离为物体的间隔位移dL。

图5 采样面积积分示意图Fig.5 Schematic diagram of the sampling area integration
3 仿真验证
根据基于横截面的体积估算原理设计了基于LabVIEW 的数据处理系统,通过仿真验证创新点。利用LabVIEW 虚拟仪器软件编程生成一组验证性数据,验证性数据是模拟长方体斜入射通过光敏管阵列激光靶的情形设定的,通过将经过“体积估算”程序处理后的结果与预定结果进行比对,可以检验“体积估算”程序的正确与否[4-6]。
设长方体的长、宽、高分别为48mm、16mm、16 mm。如图3所示,长方体以一定角度入射,经过起始靶在X 轴首先遮挡第4(以原点为坐标0点)路光敏管,接着遮挡第4、5 两路光敏管,继而第4、5、6路,最终遮挡了第4到7路光敏管,保持遮挡4、5、6、7路光敏管一定时间后又依次停止了对4、5、6、7路光敏管的遮挡,脱离起始靶;在Y 轴上,整个过程都遮挡了41、42、43、44路光敏管。与经过起始靶的过程相同,经过停止靶时,遮挡的X 轴光敏管路数依次为24、25、26、27;遮挡Y 轴情况与起始靶相同。系统的采样频率为2MHz,靶距为1m,光敏管的长度为4mm。
由验证数据计算得到坐标结果为:

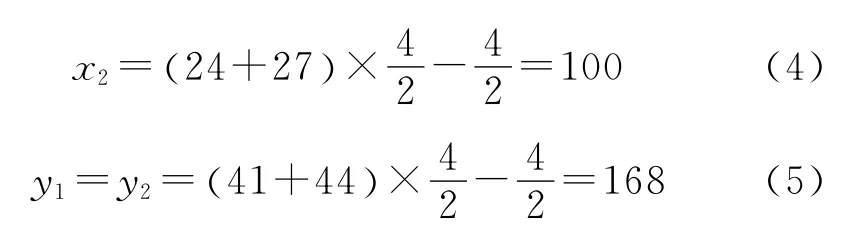
则物体经过起始靶的坐标为(20,168),经过停止靶的坐标为(28,168)。
物体斜入射的入射角

物体体积

利用LabVIEW 虚拟仪器对生成的验证数据进行数据处理,得到对高速运动物体进行靶距修正和体积估算的结果,并利用修正后的靶距计算物体的运动速度、入射角度偏移量等测量参数。数据处理结果在LabVIEW 前面板的显示如图6所示。
从图6的两个坐标靶可以看出物体在起始靶的坐标为(20,168),在停止靶的坐标为(100,168)。经过LabVIEW 数据处理后的坐标与由验证数据计算得到坐标相吻合。角度偏移量为4.57°,与由验证数据得到的入射角相等。数据处理系统对体积估算结果为12 263.1mm3,验证性数据得到的物体体积为12 288mm3,误差约为0.2%。
通过和LabVIEW 生成的验证数据相比较可以看出,基于LabVIEW 的针对物体斜入射体积估算系统实现了对物体体积的精确估算,测试结果精确到小数点后两位,满足一般测试的要求。很明显,对于斜入射物体的靶距、速度、入射角、体积估算等数据处理上,新方法具有很大的优势。

图6 LabVIEW 软件的数据处理结果Fig.6 Data processed by LabVIEW software
4 结论
本文提出了光敏管阵列激光靶基于横截面积分的体积估算方法。该方法通过计算每个采样时刻物体遮挡X、Y 轴的尺寸得到物体在该时刻的横截面积,再以物体在相邻采样时刻内运动的间隔位移为积分元对所有采样时刻物体的横截面积进行积分完成对物体的体积估算。仿真表明基于横截面积分的体积估算方法误精确度较高,该体积估算方法对于提高靶场测试的效率、测试范围和精确度具有重要作用。
[1]鲁倩.飞行破片动能光幕测试技术[D].西安:西安工业大学,2012.
[2]赵冬娥,周汉昌.基于大面积激光光幕的弹丸速度测试技术研究[J].测试技术学报,2005(3):416-419.
[3]黄智,赵冬娥.虚拟仪器和PCI总线在光弹测速中的应用[J].探测与控制学报,2010(32):68-71.
[4]侯鹰.虚拟仪器技术在常规靶场动态参数测试中的应用研究[D].南京:南京理工大学,2001.
[5]陈 树 学 .LabVIEW 宝 典[M].北 京:电 子 工 业 出 版社,2011.
[6]高聪杰,李松岩,徐赫.基于LabVIEW 的信号输出与数据采集系统[J].微计算机信息,2008(721):135-136.
