空间曲柄滑块机构的运动分析
2014-01-10徐红芹
张 思,董 海,徐红芹
(1.大连理工大学机械工程学院,辽宁大连 116024;2.山东理工大学机械工程学院,山东淄博 255049)
空间曲柄滑块机构的运动分析
张 思1,董 海1,徐红芹2
(1.大连理工大学机械工程学院,辽宁大连 116024;2.山东理工大学机械工程学院,山东淄博 255049)
应用矢量回转法对空间曲柄滑块机构—RSSP机构进行了运动学分析,计算出滑块位移、速度、加速度函数。并基于Pro/E软件平台,对该RSSP机构进行了三维建模、运动仿真,得到滑块的位移、速度、加速度曲线,与理论计算进行对比,结果表明,两种方法所得结果完全一致。所得结论可为该机构在机床设计中的应用奠定理论基础。
空间曲柄滑块机构;矢量回转法;运动仿真
0 前言
空间连杆机构是指由若干刚性构件通过低副(转动副、移动副)联接,而各构件上各点的运动平面相互不平行的机构。空间连杆机构的研究方法很多,有以画法几何为基础的图解法,有运用矢量分析、矩阵、二元数等数学工具的解析法[1]。其中矢量回转法作为解析法的一种,其特点是:概念清晰,原理简单,不需要高深的数学工具,应用方便,容易掌握,从而便于打破空间连杆机构复杂,难于掌握的传统概念,有利于空间连杆机构知识的普及和利用。
本文运用矢量回转法对RSSP曲柄滑块机构进行运动分析,得到滑块的位移、速度、加速度函数。并应用Pro/E软件进行建模及其运动仿真,在运动仿真中求得滑块的位移、速度、加速度等运动规律曲线。并将理论计算和仿真结果进行对比。所得结论为这种机构在机床设计中的应用提供理论参考。
1 RSSP机构的运动分析
应用矢量回转法对RSSP机构进行运动分析,RSSP机构运动简图如图1所示。根据矢量回转法基本参数的定义,图1中A为旋转副,B、C为球面副,D为移动副;l1、l2、l4代表杆长;SA、SD代表副长;θ1代表转角;α4代表扭角;1、2、3、4为构件。
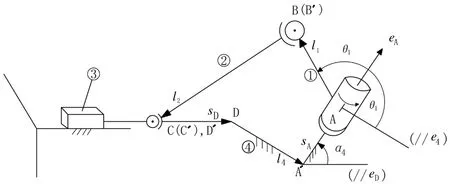
图1 RSSP机构的运动简图
如图1所示的RSSP曲柄滑块机构的运动简图。各杆长和副长的方向均从总体上按逆时钟方向沿封闭图顺序选取。选取机架4为参考系,D为i、j、k坐标系的原点,并取:

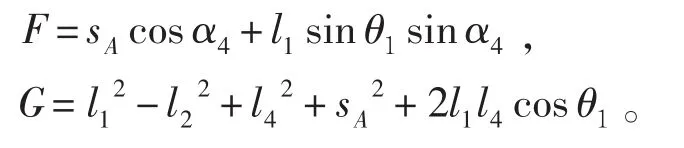
根据机构运动的几何等同性原则,应用“拆杆法”,得到RSSP机构的位置分析公式:

求得:

式(1)中:
由于选取机架4为参考系,eD=i,故只有公式(2)中根号前为负号时,才能保证sD。则公式(2)应为:

不失一般性,假定各个参数如下:l1= 65 mm, l2=170 mm, l4=20 mm, α4=0°,sA=0。且当滑块处于极限位置时[2]应满足关系式:

由公式(3),算得θ1=0°或者180°。
当 θ1=0°时,代入公式 (2),计算得sD=-147.224 mm。
当θ1=180°时,代入公式(2),计算得sD=-163.936 mm。
位移结果分析可以看出,在矢量回转法中H= |163.936|- |-147.224|=16.712 mm。
将空间连杆机构的位置方程对时间求导,即可以得到速度和加速度方程式。对于图1所示的RSSP空间曲柄滑块机构,设构件1为主动件,且以等角速转动(不失一般性,取=360°/s),即=0,将式(1)对时间求导,可求出构件4对构件3的相对速度和加速度和。


构件3(滑块)的绝对速度和加速度值(即输出速度和加速度值)为:

构件3的绝对速度和加速度矢量在坐标系D-i、j、k的i方向的分量即为滑块的绝对速度和加速度。举例当取θ1=0°、36°、72°、108°、144°、180°,应用矢量回转法计算滑块的位移、速度、加速度值,如表1所示。表1中正号为沿着i方向,负号为i方向的反向。
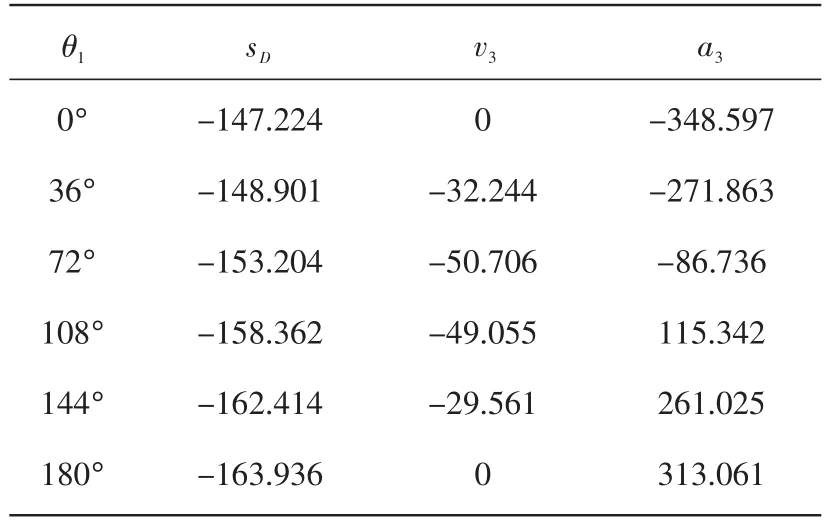
表1 滑块位移、速度、加速度值
2 基于Pro/E平台进行RSSP机构的运动分析
在Pro/E零件模块下依次创建代表驱动部件的主动轴,曲柄,球座,球套,连杆,移动部件,以及导轨。在Pro/E组件模块下进行各个零件的装配,装配图如图2所示。

图2 RSSP机构三维模型
进入Pro/E运动仿真模块,在驱动元件主动轴处的销钉连接处定义伺服电动机,轮廓参数设定为常数360°/s,也就意味着滑块的摆动周期为1 s。接着进行运动分析的定义,定义类型为运动学,分析时间2 s,帧频200。最后定义测量参数,分别定义位移、速度、加速度的测量,并得出位移、速度、加速度随时间变化的曲线,如图3,4,5所示。
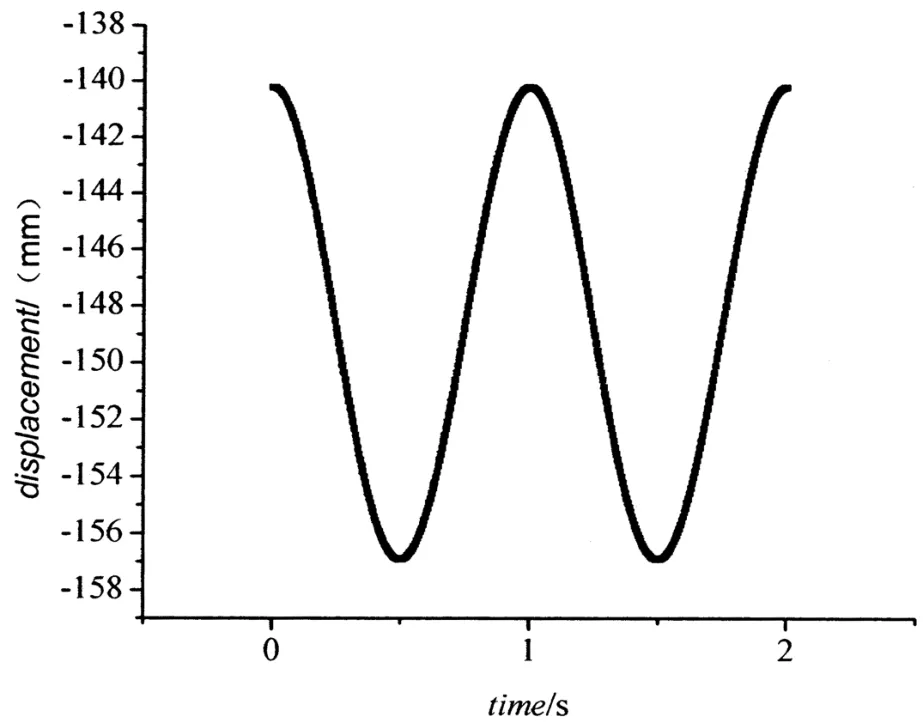
图3 位移曲线
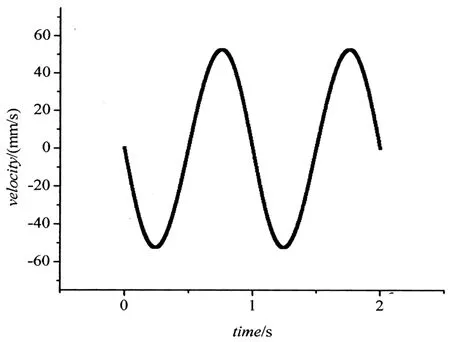
图4 速度曲线

图5 加速度曲线
位移曲线3可以看出,在RSSP机构中,当l1,l2,l4,sA,α4设定之后,输出sD随着输入角度θ1(时间t)而变化,由于运动分析中初始位置选定为滑块行程的最右侧,故位移曲线在一个周期(1 s)内,幅值先增大再减小,成正弦曲线状态。当θ1=0°时,测量点位移为-147.224 mm,当θ1=180°时,测量点位移为-163.936 mm。计算出滑块此时的行程为H= 16.712 mm。与应用矢量回转法所计算的结果完全相同。
速度曲线4可以看出,速度随着输入θ1的变化,在一个周期内速度出现两个峰值,对应于θ1=0.24×360°=86.4°和 θ1=0.76×360°=273.6°位置处。当θ1=0°和θ1=180°时,速度为0,对应位移曲线分别为最小、最大幅值处。并且速度的最大幅值为52.499 mm/s。
同时随着运动仿真中帧频与运动时间设置的不同,出现速度极值的位置略有变化,但变化很小,可以忽略。
从加速度曲线5可以看出,在初始位置处加速度幅值最大,达到了348.597mm/s2,在一个周期内,加速度不存在突变现象,既无刚性冲击也无柔性冲击[3],加速度极限值不大,故若将此RSSP机构用于机床往复直线摆动机构,可以满足往复直线摆动换向平稳、冲击力小等技术要求。
当取θ1=0°、36°、72°、144°、180°时,在曲线3、4、5中所得到的位移、速度、加速度值与应用矢量回转法所得结果完全一致。但可以看出应用Pro/E软件进行空间RSSP机构的设计更加方便,尤其当RSSP机构中各个参数变化时,应用矢量回转法需要重新带入各个参数进行复杂的计算,而基于Pro/E的运动仿真,只需简单的改变模型的尺寸便可得到机构的运动学参数,节省设计时间[4]。
3 结论
应用矢量回转法对RSSP机构进行了运动学分析,同时基于Pro/E软件对RSSP机构进行了运动仿真,得出以下结论:
(1)应用矢量回转法对RSSP机构进行了运动学分析,计算得到滑块的位移,瞬时速度,瞬时加速度函数;
(2)应用Pro/E软件进行运动仿真,得到位移、速度、加速度随时间变化的曲线,与矢量回转法比较,结果完全一致;
(3)在今后空间RSSP曲柄滑块机构的设计当中,可以单独应用Pro/E软件进行机构的运动分析。
[1]祝毓琥,刘行远.空间连杆机构的分析与综合[M].北京:高等教育出版社,1986.
[2]张启先.空间机构的分析与综合[M].北京:机械工业出版社,1984.
[3]高中庸,孙学强,汪建晓.机械原理[M].北京:科学出版社,2010.
[4]田中辉,李玉光,王淑芬,等.基于空间解析几何的双横臂独立悬架运动学分析[J].机电工程,2012(8):894-897.
[5]缪建成,王艳辉,陈关龙,等.结合PRO/E和ADAMS进行RSSR空间机构运动分析[J].机电工程技术,2006,35(6):97-100.
Kinematic Analysis of Spatial Crank-Slider Mechanism
ZHANG Si1,DONG Hai1,XU Hong-qin2
(1.School of Mechanical Engineering,Dalian University of Technology,Dalian116024,China;2.School of Mechanical Engineering,Shandong University of Technology,Zibo255049,China)
The method of rotation vector was employed to analyze the kinematic parameter of spatial crank-slider mechanism-RSSP mechanism.The displacement,velocity and acceleration function of the slider were obtained.Based on the PROE platform,the three dimensional model of the mechanism was built;the displacement,velocity and acceleration simulation curve were acquired.Simulation result was completely consistent with the result of the theoretical calculation.The proposed result can lay a foundation for machine tool design.
spatial crank-slider mechanism;rotation vector method;kinematic simulation
TH112
A
1009-9492(2014)05-0044-03
10.3969/j.issn.1009-9492.2014.05.010
张 思,男,1988年生,辽宁锦州人,硕士研究生,研究领域:先进刀具加工用高精度工具磨床设计与制造。
(编辑:阮 毅)
2013-11-21
