未来智能公路行车系统的模拟设计
2014-01-05龙兴波樊昌元
龙兴波,樊昌元,黄 敏
(1.成都信息工程学院电子工程学院,四川 成都610225;2.中国气象局大气探测重点实验室,四川 成都610225)
0 引言
交通运输是社会进步和经济发展的先决条件和基本需要,是现代社会生产、社会活动等各环节正常进行和有序发展的前提保障,对保障经济社会可持续健康发展、改善提高人民生活质量和促进社会现代化建设等方面具有十分重要的意义。然而,汽车交通量的剧烈增长却带来了一系列的交通问题,交通拥挤、交通事故频发已成为影响公路安全运行的头号公害,给人类生命财产带来了巨大损失。
随着计算机网络、电子通信、机电一体化、自动化控制等领域的最新理论和技术的快速发展及其变化,未来智能公路行车系统在提高交通效率和安全上起着愈加重要的作用,可以大大降低并排除人为错误,对预防和避免交通事故的频繁发生具有十分重要的作用。未来智能公路行车系统是传统交通工程的不断深化、拓展和完善,却又与传统的交通工程存在着明显的不同。
未来智能公路行车系统是当今世界车辆工程、电子通信及自动化控制等研究领域的一个重要问题,它是以智能化公路为基础,不违背现有道路基础设施和车辆系统协调与合作的前提,广泛应用现代计算机网络、电子通信、自动化控制、传感器等技术来实现车辆的辅助驾驶或适当条件下的自动驾驶,从而大大降低人为因素造成的交通问题或事故,对提高公路行车系统的安全性和运行效率具有重大的意义[1-4]。
针对当前研究领域的前沿热点问题,提出未来智能公路行车系统的模拟设计,代表着未来智能公路系统的发展趋势及方向,是探索未来智能交通系统的可持续发展的必由之路。同时,该模拟系统对电子工程设计及未来相应的科学领域研究具有较强的工程应用价值。
1 系统的工作原理及设计要求
未来智能公路行车系统可以划分为主车部分、从车部分以及相应的行车车道组成。系统中的主、从车部分的原理框图如图1所示,主要包括:Advanced RISC Machines(ARM)处理器、超声波测距电路、速度路程测量电路、寻迹避障电路、电机驱动电路、显示电路、报警电路等部分。
系统的智能公路行车车道如图2所示,这只是行车车道上的一小段,行车车道主要由行车道和超车道组成,两车道均是单向车道,在行车道旁的适当位置处设置有超车道。

图1 主、从车的系统框图
主、从车启动前都位于行车道,主车在后,从车在前,两车以任意适当间距启动行驶,两车均可自动控制行车速度,并自动保持规定安全间距行驶,一旦间距小于安全距离,小车会自动报警,这时可通过减速等方式使小车之间的距离达到安全距离,这样就有效地避免了交通追尾事故的发生。两车在行驶过程中,若有任何一小车想超越前面的小车,只要在行驶到有超车道的位置时,便可自动进入超车道加速行驶,然后再回到行车道,顺利地实现超车。系统中,主、从车在到达目的地之前的行驶过程可用图3的流程图表示,这样便可以更形象直观地了解到系统的设计要求。

图2 智能公路行车车道
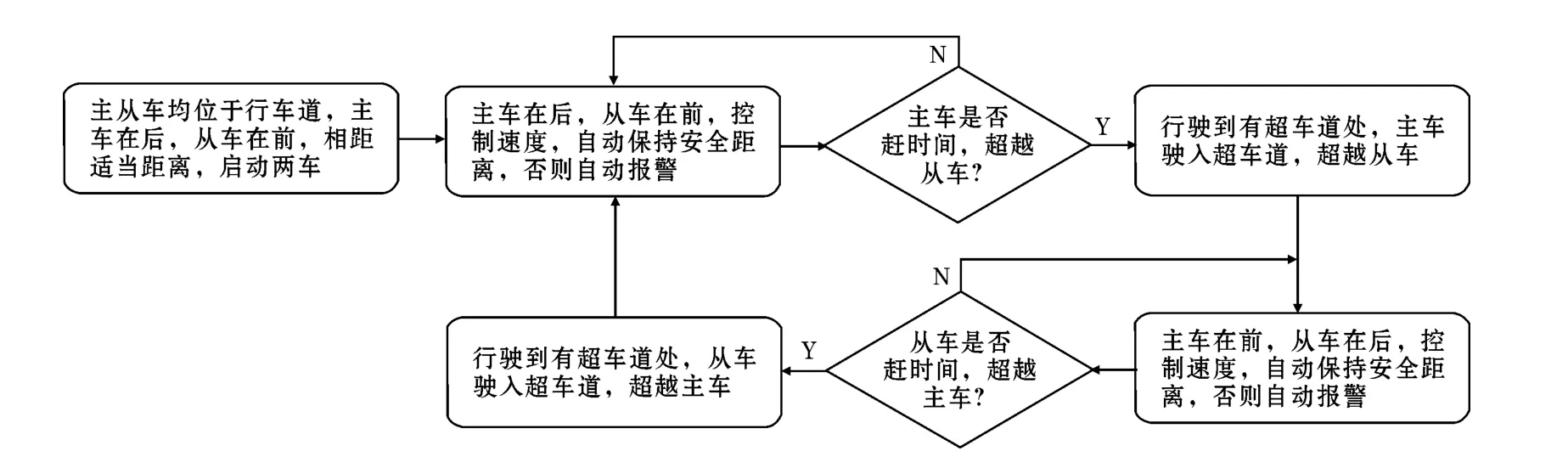
图3 主、从车行驶流程图
2 系统的硬件设计与实现
2.1 超声波测距电路的设计
超声波是一种能够在弹性介质中产生的机械震荡,由于超声波不仅具有方向性好、穿透能力强、衰减小的特点,还具有反射能力强、能量消耗较慢、距离传播较远等优点,因此经常被用来测量距离;除此超声波被用来测量距离的原理非常简单,设计制作较方便,成本也比较低[5]。因此在系统中,利用超声波的上述优点来实现对主、从车之间的距离进行实时准确及高精度的自动检测。

图4 超声波测距原理框图
由于超声波在空气中的传播速度为已知,超声波测距原理便是利用这一特性,只需测量出超声波被发射后在遇到障碍物被反射回来时所经历的时间,便可根据发射和接收到超声波的这一时间差来计算出声波发射点到障碍物的实际距离[6-7]。设超声波脉冲由声波发射器发射出直到接收到声波所经历的时间为t,在空气中超声波的传播速度为c,则超声波传感器距离障碍物的间距D=ct/2,系统中超声波测距原理框图如图4所示。
2.2 电机驱动电路的设计
主、从车在行驶过程中,需要实时调节行驶速度,所以系统中选用步进电机来控制其运动及速度,但是ARM处理器的驱动能力有限,无法直接驱动步进电机,所以这就需要设计步进电机驱动电路[8]。驱动电路选用L298N驱动芯片,驱动步进电机控制主、从车的运动,并能实时对其进行PWM调速[9-10];该步进电机驱动电路不仅具有较强的驱动能力,还有发热量低、抗干扰能力强的特性。
电机驱动电路原理图如图5所示,输入端口IN1、IN2、IN3、IN4分别控制对应的输出端口OUT1、OUT2、OUT3、OUT4,即当输入端口为高电平时,所对应的输出端口为驱动电压VCC,当输入端口为低电平时,所对应的输出端口电压为0。使能端口enableA和enableB分别控制输入端口IN1、IN2和IN3、IN4,即当enableA为高电平时输入端口IN1和IN2才能控制输出端口OUT1和OUT2,同理,当enableB为高电平时输入端口IN3和IN4才能控制输出端口OUT3和OUT4。ARM处理器的I/O端口与输入端口IN1、IN2、IN3、IN4相连接,通过控制I/O端口的电平变化,即可以实现对步进电机进行正反转、停止等操作。
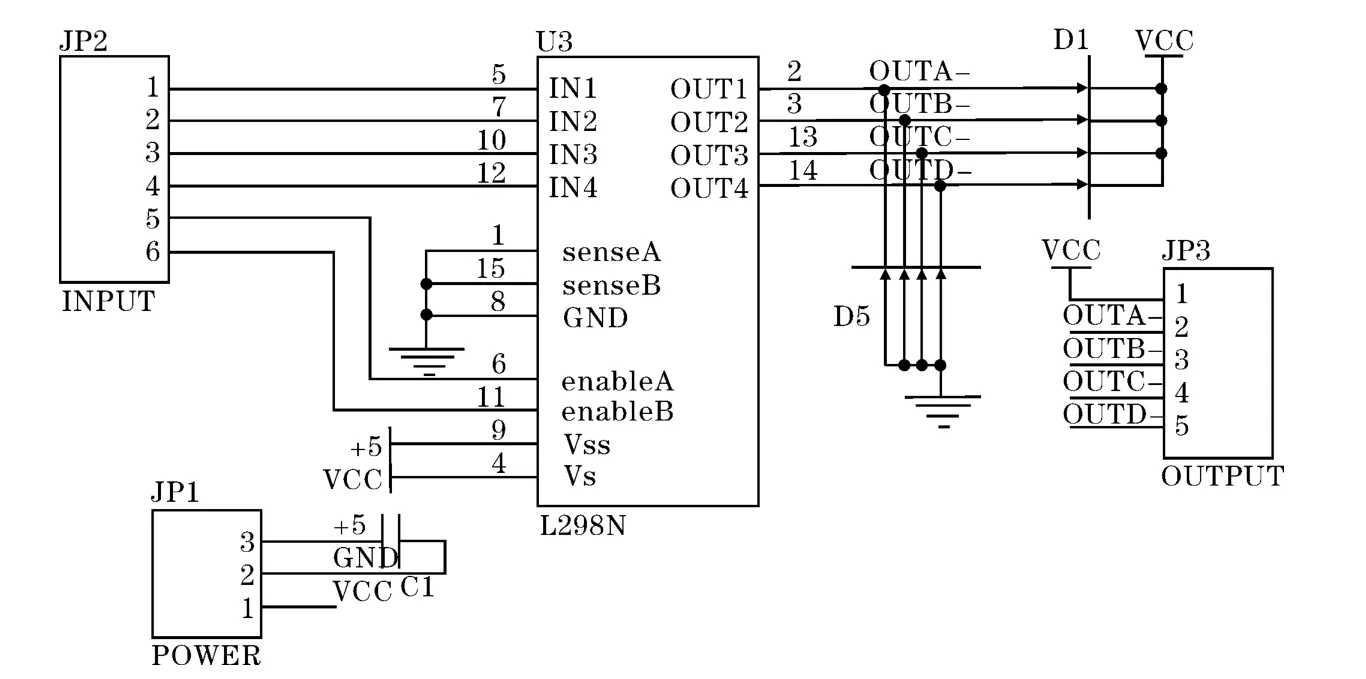
图5 电机驱动电路
2.3 速度路程测量电路的设计
主、从车在行驶过程中,需要自动保持安全间距行驶、在必要时进行超车,这就要实时准确地获取主、从车在不同行驶环境和状态下的行驶速度,以便ARM处理器根据这些信息对步进电机进行相应的控制处理,从而实时调节行驶速度,进而达到相应的目的。

图6 速度路程测量原理
系统设计了速度路程测量电路实现上述要求,电路主要采用霍尔传感器实现实时测量速度路程的功能[11-12],原理图如图6所示,霍尔传感器采用的是单总线驱动电路,因此外围电路非常简单,在输出端加一个2K的上拉电阻,可以加大输出的驱动能力。当霍尔传感器靠近磁钢时,由于霍尔效应,传感器输出端输出低电平,ARM处理器每接收到低电平信号就计数n,并且计时t。由于系统中,在主、从车的车轮上安装了5个磁钢,即车轮转动一圈电平变化5次,所以小车行驶的路程为:S=nC/5(C为车轮的周长),平均速度为V=S/t。
2.4 寻迹避障电路的设计
系统的智能公路行车车道如图2所示,图中的黑色线条便是各个车道的边界。系统中的主从车自动沿着车道行驶,不能越过车道的边界,即系统中的主从车必须具备自动寻迹的功能,因此这就要设计寻迹避障电路。
寻迹避障电路原理图如图7所示,一对光电开关的发射管不停地发射红外光,经过路面反射后被接收管接收,由于白色路面和黑色边界线对光反射的不同特性,所以正对白色路面的光电对管的接收管接收到更多的红外光,而正对黑线的光电对管的接收管收到较少的红外光。经过光电开关接收电路将接收到红外光的多少转化为正相关的电流大小,并进一步转化成接收电路的输出电压(A点电压),A点的电压进一步与一个居中的基准电压(B点电压)进行比较,对应比较器的输出端(C点)就为高低电平,并进一步将该高低电平传输给ARM处理器,同时对应的指示灯亮与不亮。根据所处的环境不同,寻迹避障传感器的灵敏度可以通过调节基准电压达到。ARM处理器以接收到的高低电平为依据实时获取主从车的当前位置及其行驶路线,一旦小车偏离相应的车道,ARM处理器就可通过控制I/O端口的电平变化,以控制电机驱动电路的输出实现小车的左转、右转、前进和后退运动,从而实现主从车的自动寻迹功能[13]。

图7 寻迹避障电路
系统使用了3对图7所示的光电开关,其中2对用于寻迹,另1对用于实现主从车的自动避障功能。当该传感器逼近障碍物时,向外输出高电平,远离障碍物时输出低电平,ARM处理器就可根据获取的高低电平来控制小车的行驶方向[14-15]。一旦行驶中的小车遇到障碍物或接近前方行驶中的车辆时,便可采取减速或停车的方法来顺利地避开障碍物,从而进一步避免了交通追尾事故的发生。
2.5 显示、报警电路的设计
系统中设计的显示、报警电路相当简单,在此不做详细的介绍。主、从车在行驶过程中,需要自动保持安全间距行驶、在必要时进行超车,这就要求实时准确直观地获取主、从车在不同行驶环境和状态下的间距、行驶速度、路程等相关信息,以便根据这些信息进行相应的控制处理。系统使用液晶显示屏来实现主从车的间距、速度路程等相关信息的显示,该显示器具有大小适中的可视面积,画面效果较好,足够强的抗干扰能力等优点,特别适合应用于该系统中相关信息的显示。
报警电路主要采用的是蜂鸣器来模拟,主、从车在行驶的过程中,一旦主从车的行驶间距小于规定的安全距离,这时小车会自动报警,警告可通过减速等相应的控制处理使主从车之间的距离达到安全距离,这样交通追尾事故就再次被有效地避免发生。
3 系统的软件设计与实现
uC/OS-II是一个具有免费使用、可裁减的、抢占式、源代码开放等优点的实时多任务嵌入式操作系统内核,它提供了一系列基本功能,包括任务调度、任务管理、时间管理、内核管理和任务间通信与同步。由于uC/OS-II拥有高度可靠性、可移植性、可裁减性、安全性和开放性等特点,特别适合应用于微处理器和控制器。因此,用户可以根据系统设计要求添加需要的各种服务,内核是基于任务优先级的可剥夺性实时内核,通过时钟节拍和其他硬件中断以及任务,系统主动挂起或者等待状态进行任务调度[16]。
根据系统的设计要求所添加的各种任务包括:超声波测量主从车的间距、小车的自动寻迹避障、电机驱动、测量小车行驶中的速度路程、相应数据信息的显示以及车距一旦小于安全距离时的自动报警等任务。将这些任务的代码和可能用到的中断服务程序编写好后,那么应用程序便开始运行。如果需要增加系统的功能,只需要添加相应的任务和调用一定的系统服务即可达到目的。系统实现各项功能的程序流程如图8所示。
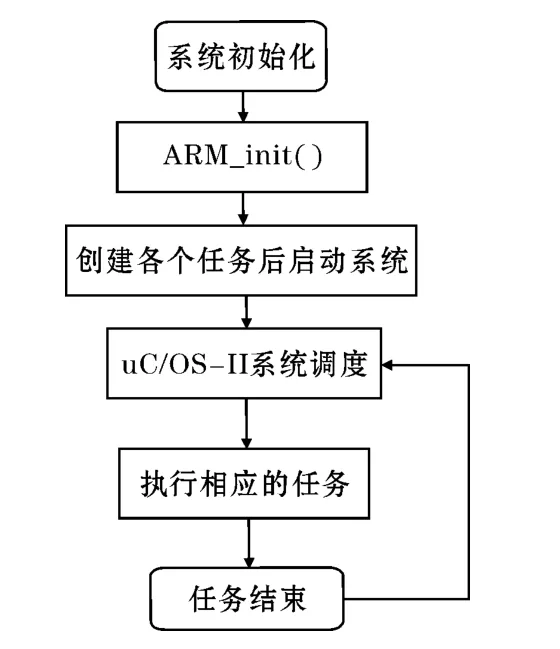
图8 系统程序流程图
4 系统测试
在图2所示的智能公路行车车道的条件下,系统设置的主从车安全间距为50cm,匀速行驶速度为10cm/s。主、从车启动前都位于行车道,当主车在后,从车在前时,主从车在行驶过程中的测试数据如表1所示。

表1 主车在后,从车在前时的系统测试数据
当主车在前,从车在后时,主从车在行驶过程中的测试数据如表2所示。
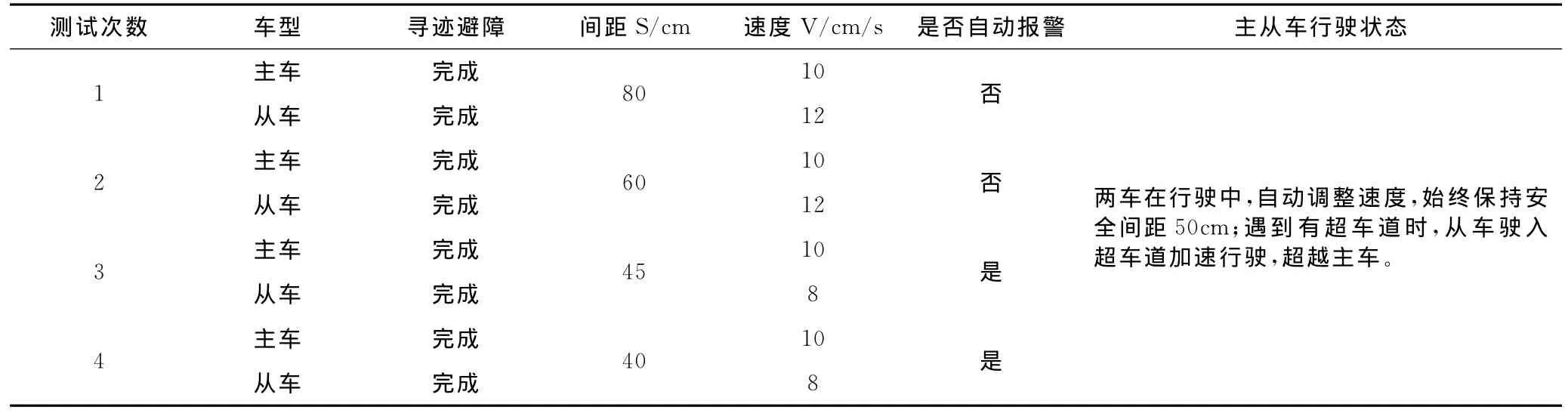
表2 主车在前,从车在后时的系统测试数据
通过不断反复地系统测试,两车以任意适当间距启动行驶,均可自动控制行车速度,并自动保持规定安全间距50cm行驶,一旦间距小于安全距离50cm,行驶在后面的小车会自动报警,这时可通过减速等方式使小车之间的距离达到安全距离。两车在行驶过程中,若有任何一小车想超越前面的小车,只要在行驶到有超车道的位置时,便可自动进入超车道加速行驶,然后再回到行车道,顺利地实现超车。经过不断地调试和改进,达到了系统预计的设计功能和要求。除此,系统的显示功能也符合设计要求,从而能准确直观地获取主、从车在不同行驶环境和状态下的间距、行驶速度、路程等相关信息,以便根据这些信息进行相应的控制处理。
5 结束语
提出的未来智能公路行车系统虽然只是模拟设计,但代表未来智能公路系统的发展趋势及方向,对未来相应的科学领域研究具有指导意义及较强的工程应用价值,引起广泛关注。随着社会经济的快速发展,电子通信、计算机网络的广泛应用,自动化控制等领域技术的迅猛发展及应用,未来智能公路行车系统不仅可极大地提高公路交通的运行效率和降低交通事故的发生率,以及在提高交通道路使用者的舒适度和满意度等方面必将扮演着越来越重要的角色;而且将为实现智能公路系统的运输提供更为安全舒适、高效快捷、经济的基础服务。
[1] 李斌,梅新明,吴涛,等.智能公路技术展示系统设计与实现[J].公路交通科技,2008,25(12):146-150.
[2] 金茂菁.我国智能交通系统技术发展现状与展望[J].交通信息与安全,2012,30(5):1-5.
[3] 王国锋,宋鹏飞,张蕴灵.智能交通系统发展与展望[J].公路,2012,(5):217-222.
[4] 陆化普,李瑞敏.城市智能交通系统的发展现状与趋势[J].工程研究-跨学科视野中的工程,2014,6(1):6-19.
[5] 赵小强.简易的超声波测距系统[J].天津理工大学学报,2010,26(1):49-52.
[6] 靳霖霖,曾迎生,宋金泽.自动泊车超声传感器系统设计[J].微计算机信息,2010,26(13):113-115.
[7] 张珩,刘亚杰.AT89C52超声波测距倒车防撞报警系统[J].现代电子技术,2010,(3):205-207.
[8] 郑虎子.单片机控制混合式步进电机驱动电源的研究及设计[D].武汉:华中科技大学,2007.
[9] 林金阳,王明福.基于 MC51单片机的直流电机PWM调速系统[J].长春工程学院学报(自然科学版),2009,10(3):32-35.
[10] 丁阳喜,吴冀林.基于单片机测量电机转速的系统设计[J].煤矿机械,2010,31(3):236-238.
[11] 邵显涛,陈明,李俊.基于霍尔传感器电机转速的单片机测量[J].电子测试,2008,(12):46-48.
[12] 牛洁,周静,苟娜.基于霍尔传感器的直流电机转速测量系统设计[J].电子测试,2008,(5):75-78.
[13] 瞿少成,艾宁,赵桥.基于SPCE061A单片机的无线语音控制智能小车的研制[J].电子测量技术,2008,31(12):151-154.
[14] 姚培,张李坚,周晶香.基于单片机控制的智能循迹避障小车[J].机电信息,2010,(12):192-193.
[15] 赵文龙,李立斌.AT89C2051微处理器在汽车倒车防撞报警器的应用[J].机电工程技术,2008,37(10):94-96.
[16] 王卫东,徐志强.基于 ARM+uC/OS-II的超声波水煤浆粒度检测仪的设计[J].工矿自动化,2008,(1):41-43.
