载运货车超载限制系统设计
2014-01-03吴铭哲苏永茂郑金城赵志华
吴铭哲,苏永茂,郑金城,赵志华
(1.义乌市民用航空管理局,义乌,322000; 2.哈尔滨工业大学,威海,264209)
0 引言
受多种因素影响,国内汽车行业在运输市场上的运输能力小于运输数量,导致多年来运输价格不断攀升,大部分从事运输行业的车主们受经济利益驱使,就从超载运输中获取暴利。据相关统计,超载货车占货车总量的50%左右,超载量基本在4~6.25 倍左右。
车辆超载严重扰乱了道路运输市场,使得国家道路与桥梁的建设和维护更加困难,使道路周围的环境受到了更多污染,严重威胁着人们的生活和财产安全。因此,笔者提出了一种基于车载称重技术和CAN 总线通信技术的载运货车超载限制系统。该系统不仅能对车辆的载荷进行准确的监测,还能够实现车辆超载后无法正常启动的功能,因此,对车辆超载的治理有着积极的意义。
1 总体设计方案
载运货车超载限制系统主要由传感器组、监控单元和限制执行单元构成,如图1 所示。

图1 系统总体方案图
2 超载限制系统硬件设计
2.1 主要传感器的设计
(1)电阻应变传感器设计

所以只要测得钢板弹簧的应变即可间接得出钢板弹簧的载荷信息。本文中电阻应变传感器的应变片选用选择金属箔式应变片,测量电路采用全桥电路。
(2)车辆行驶判断电路设计
车辆行驶过程中,超载限制系统对其控制,势必会给行车安全带来很大的影响,所以超载限制系统工作前必须判断车辆是否行驶。
车辆行驶判断电路的基本原理为霍尔效应。当车辆行驶时,车辆行驶判断电路输出TTL 高电平,单片机判断车辆行驶中,超载监测与超载限制系统暂停工作,否则单片机判断车辆未行驶,并进行数据的采集。
(3)车体振动判断电路设计
停车状态下,货物装载后启动前也存在着微小振动,将会对测量结果产生影响,所以在货物装载后要进行振动检测。
当车体有振动时,车体振动判断电路输出高电平给MCU,MCU 进行动态称重,否则输出低电平给MCU,MCU 进行静态称重。
2.2 超载监测模块关键技术
(1)放大电路设计
称重传感器输出的信号十分微弱,并且随时有振动和噪声的干扰,所以为了保证测量值的准确性,在称重传感器的信号通过A/D 转换之前,必须对信号进行放大。称重传感器输出的电压为毫伏级别,为了保证测量精度,本文选用高精度仪表放大芯片AD620。
(2)数据的处理与显示模块设计
本文的MCU 选用的是宏晶公司生产的STC12C5A60S2 系列单片机,此单片机适用于强干扰场合。四个电阻应变传感器与角度传感器输出的模拟电压信号由STC12C5A60S2 的自带A/D 转化成数字信号后,经过MCU 计算得出车辆的总载荷与各轴的轴载。最后判断车辆是否超载,并将结果显示到液晶屏上。当车辆超载时,超载监测模块启动声光报警,之后再启动超载限制执行模块限制超载车辆正常启动。
2.3 超载限制执行模块设计
超载监测模块判断车辆超载后,需要限制车辆启动,这个执行动作由超载限制执行模块来完成。超载限制执行模块与车辆CAN 总线进行通信,控制燃油喷射的相应CAN 节点,通过控制供油电磁阀的开闭来限制车辆启动
(1)CAN 控制器
本文选用Philips 公司生产的独立型工程控制器SJA1000,此种独立型控制器在工程使用中相对灵活,能够与多种类型的微处理器、单片机的标准总线接口进行组合,非常适用于汽车环境,SJA1000 与MCU 的接口如图2 所示。
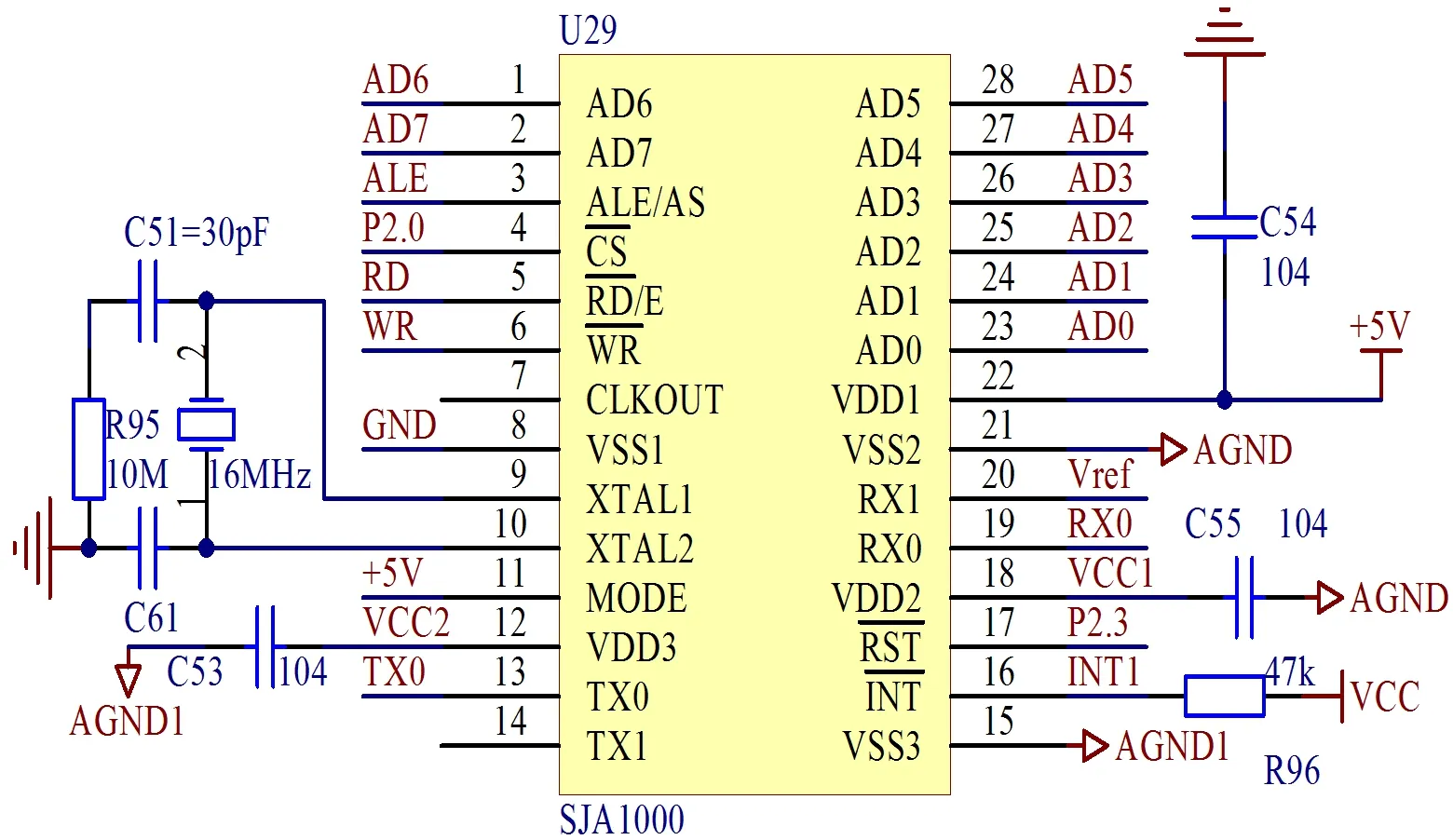
图2 SJA1000 接口原理图
SJA1000 的AD0~AD7 与STC89C52 单 片 机 的P0 口 连 接,作为数据和地址复用总线。WR、RD、ALE 分别与单片机对应脚相连。片选信号与单片机的P2.0 管脚相连,当管脚P2.0 为0 时,系统选中SJA1000,并可对其进行相关的操作。SJA1000的MODE 接+5V,选择InTel 的工作模式为二分频。INT 是SJA1000 控制器中断信号的输出端,与单片机的INT1 管脚相连接,处理器通过中断的工作方式对SJA1000 的数据存储区进行访问。
(2)CAN 驱动器
本文选择Philips 公司生产的PCA82C250 作为本模块的CAN 驱动器。PCA82C250 与SJA1000 接口如图3 所示,引脚1和4(TXD、RXD)分别与CAN 控制器SJA1000 的TXD 和RXD 管脚连接。其引脚8(RS)有3 种不同的工作方式供选择:斜率控制、高速模式和待机模式。由于系统波特率较低,本电路采用斜率控制方式,在RS 引脚上接一个斜率控制电阻,电阻的阻值依据总线通信速度来调节,通常在16~200K 范围内选择,本电路选用电阻。

图3 PCA82C250 接口原理图
3 超载限制系统软件设计
超载限制系统的软件设计主要包括:传感器数据的采集、传感器数据的处理、数据的显示以及与车辆CAN 总线进行通信以限制超载车辆启动。
系统的整体程序流程图如图4 所示。
4 结语
目前车载称重技术只是对车辆载荷与轴载进行检测与显示,或者利用无线通信设备将车辆超载信息发送给超载监督部门,但这没有阻止超载车辆正常运行,对公路依然损害很大,达不到良好的超载防治效果。所以笔者提出设计了一种利用应变传感器测量车辆钢板弹簧的载荷信息,间接得出车辆载荷与各轴轴载,并判断其超载情况,当车辆超载时,系统与车辆CAN总线进行通信限制超载车辆正常启动的装置。此系统从源头上,降低了超载车辆的各种危害,对监测和治理车辆超载、保证运输与行车安全、减少车辆超载对道路的损害具有十分重要的意义。
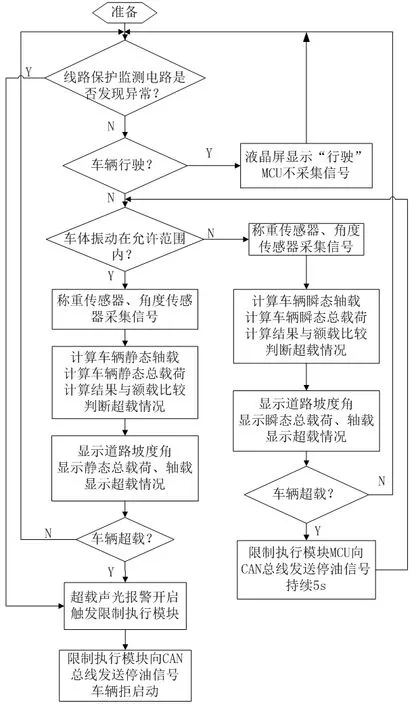
图4 系统总体方案图
[1] 杜娟,刘晓东.我国车辆超载现状分析及对策研究[J]. 价值工程.2012,31(1): 279-280.
[2] Liu C R, Guo L,Li J,et al.Weigh-in-motion (WIM) sensor based on EM resonant measurements[C]//Antennas and Propagation Society International Symposium,2007 IEEE. IEEE, 2007: 561-564.
[3] 田晶晶, 李世武, 苏建, 等. 基于位移传感器的汽车超载动态监测预警系统[J]. 吉林大学学报: 工学版, 2012,42(006):1475-1480.
[4] Su Y,Singh G.Synchronization in CAN-based Embedded Systems[J].Embedded Systems and Applications.Las Vegas,Nevada,USA,2004.
