室内移动目标超声定位系统的设计与测试
2014-01-02孙露露韩会杰李润鑫
孙露露 崔 泽 周 静 杨 舒 韩会杰 李润鑫
中国矿业大学(北京)机电与信息工程学院
基于超声波定位的原理,本文设计了一种室内移动目标的定位方法。主要研究了超声波三球定位算法,并提出了定位人员朝向的设计方案,完成实际系统的搭建,并针对多名快速移动人员进行了测试。测试结果表明,本系统可高精度快速度的完成人员位置定位及朝向定位。
引言
目前,能对室内目标进行快速、精确定位,同时具有高性价比的系统的开发引起了人们的关注。对煤矿地下人员进行定位可以有效防止人员进入危险地带,还可以在事故中快速完成搜救;对地下停车场中车辆进行定位,可以辅助完成车辆停车,也可以满足租赁汽车行业对所租车辆在GPS 无法覆盖的地下车库中的定位需求;在舞台上,灯光跟踪演员时靠人眼不够准确快速,对演员精确的定位可很好的满足灯光跟随的要求;在室内反恐训练及行动中,对武警进行精确快速定位有助于战术的训练、制定及评估。由此可见,室内定位具有广阔的应用前景。
室内定位技术主要有红外线技术、ZigBee 技术、无线蓝牙技术、射频识别技术、超声波技术、超宽带技术和光跟踪技术。与其他技术相比,超声波技术定位精度高,定位速度快,产品成本较低,设备易于安装,定位目标所携带标签体积小,受环境影响小、抗干扰能力强,能够很好的满足室内定位的需要。
研究方法
室内移动目标超声定位系统原理
室内移动目标超声定位系统为一种房屋、楼宇环境下室内目标的声波定位技术,尤其涉及多个移动目标的实时声波定位。为实现特警战士反恐训练目标,将无线互联网技术和声学定位技术相结合,提供一种高精度的复杂楼宇环境定位技术。其定位过程是:首先,由“无线查询-同步”控制系统(WISC)发射定位查询指令,移动目标(标签)在WISC 的指令下定时发射超声脉冲。与此同时,空间分布的定位传感单元也在该WISC 指令同步下接收超声脉冲,通过以太网将定位数据传输给WISC 系统,WSIC根据传播时延测距直接解算标签位置,最后及图像处理终端。如图1 所示。
定位系统由三个组成部分:WISC 无线控制系统、有源声学标签和定位传感单元。定位传感单元一般是一个房间设置一个,有源声学标签一般是十多个。将多个房间的数据最后在WISC 系统中进行图像模拟显示,最终完成多移动目标、多房间的实时定位。
室内移动目标超声定位系统的设计
无线控制系统(WISC)设计
无线控制系统(WISC)主要完成2 项工作:
1)与声学定位标签进行无线通讯,WISC 需要对系统中的所有标签和定位传感单元逐个进行自检(无线),其中,标签发射的回复指令由定位传感单元接收后通过以太网传回给WISC,定位传感单元的回复指令直接通过以太网传回给WISC。WISC 需要针对指定标签发出定位查询指令,标签在收到WISC 的定位查询指令后,发射自身状态信息(主要是罗经参数),由定位传感单元接收后通过以太网传回给WISC。
2)WISC 需要将收到的超声波接收延时数据进行解算,得出定位标签的准确位置,并将位置数据和标签传送的罗经数据进行图像处理,得到模拟的空间位置图像。

图1
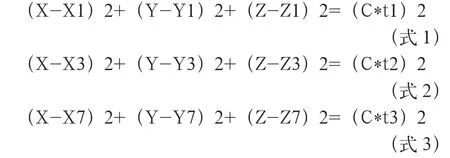
其定位算法采用三球定位算法。将超声波的时间差定义为一组声波数据。声波数据与声速的乘积就为声源到达测量点的实际距离,利用三组超声波数据,可以对目标进行三球定位。三球定位法中目标的位置是由以各站为圆心,以各站同时测量目标的距离为半径的三个球的交点来确定。实际环境中,我们根据定位空间的大小搭建了一定数量的测试点,将同一时刻接收到信号最强的三个测试点的数据定义为有效数据。现有8 个测试点,假设选中的测试点为1 号、3 号、7 号。坐标分别一记为(X1,Y1,Z1),(X3,Y3,Z3),(X7,Y7,Z7),信源到达3个测量站的时间分别为t1,,t2,t3,超声波在空气的传播速度为C,则利用三球进行定位的公式为:
通过对超声波的物理特性的分析,我们知道超声波在空气中传播时,温度对超声波的传播速度有很大的影响

R——气体普适常数;
T——气体绝对温度;
M——气体分子量。
在通常情况下,上式中R、M 对超声波在空气中的传播速度影响不大,可视为常量看待。在本系统中,在每个温度上下5 OC,均以10 OC 取整,如表1。

表1
由式1、2、3、4 可得出声学标签位置(X,Y,Z)。
由于本系统主要用于人员的定位,所以设计了人员朝向解算功能。
定位标签发送给WISC 的罗经数据中含有3 组16 位的罗经数据及加速度g 的数据。计算原理如下:
如图2,坐标系的X、Y轴在水平面内,X轴为前进方向,Y 轴垂直于X 轴向右,Z 轴沿重力方向向下,从磁北方向顺时针到X 轴的夹角即为方位角α。俯仰角φ 为加速度罗经系统纵轴与水平面之间的夹角,滚转角θ 为加速度罗经系统Z 轴与过X 轴的铅垂面之间的夹角。当加速度罗经系统不水平时,测得重力加速度g 在加速度罗经系统三轴方向的分量分别为Ax,Ay,Az,则根据坐标关系可求得俯仰角和滚转角为:

此时,磁传感器测出的地磁场在加速度罗经系统三轴方向的分量为HX,HY,HZ,由坐标关系得水平方向磁分量:
Hx=HXcos q -HZ sin q
Hy=HXsin f sin q+HZ sin f cos q
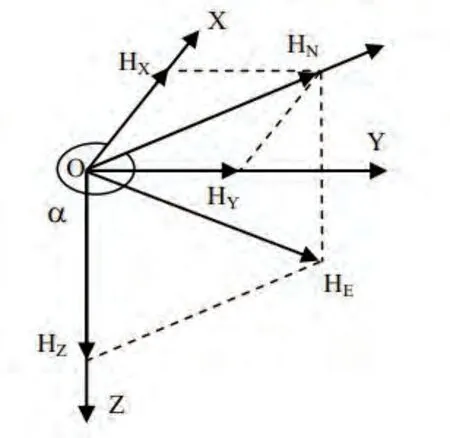
图2
可求得方位角
角即为待定位人员朝向与正北方向的夹角。
当多个定位标签同时移动时,没间隔30ms 对多个标签各定位一次,得到每个标签的不同时刻的位置数据和罗经数据,然后对室内空间进行建模,将各个定位标签的轨迹直观的显示出来,即完成了位置解算、朝向解算以及图像显示。
声学标签设计
在硬件上声学标签使用了9 个模块:电源模块、稳压模块、MCU 模块、罗经模块、加速度模块、无线模块、JTAG 模块、功放模块、发声系统。电源提供电给稳压模块,稳压模块将电压稳定于3.3V,用于给其他7 个模块供电。硬件结构示意图见图3。MCU 模块采用超低功耗的MSPF430F1611 单片机,并使用了其中的DMA 模块。罗经模块采用了HMC5983 芯片,并对其进行I2C 通讯,配置使用其中的罗经定方向的功能。加速度模块采用了KXTF9 芯片,并对其进行I2C 通讯,配置使用其中的加速度定方向的功能。无线模块采用了TI 公司的CC1101芯片,并对进行了SPI 通讯,控制发送和接收无线信息。功放模块采用了LM4880 芯片,对该芯片进行外围电路设计,完成了信号的放大及驱动功能。发声系统设计了1:50 的小体积变压器,发声传感器,完成了电信号到声学信号的转化。
在软件设计上,其流程图如图4。当上位机通过无线模块呼叫标签后,MCU 模块开始把声学数据通过内部的DMA 发送给功放模块,功放再将电压信息进行放大,同时驱动后面的发声系统,放大后的电压信号传给声学系统,声学系统中含变压器,最后转换成声学信号即超声波发出;同时,MCU 通过I2C 与罗经模块和加速度模块进行通讯,接收它们收集的罗经与加速度数据,然后 MCU 将这些信息通过无线模块传递给上位机。
传感定位单元设计
传感定位单元主要完成超声波信号的接收,AD 转换。其核心部件是超声波接收探头。接收探头由超声波传感器和传感器外围电路构成。
本系统采用压电式超声波传感器。压电式超声波传感器常用的材料是压电晶体和压电陶瓷,它是利用压电材料的压电效应来工作的。本系统设计的超声波传感器其主要由金属网、外壳、扬声器、压电晶片、底座、引脚等部分组成。其接收频率主要在25KHz 左右。

表2
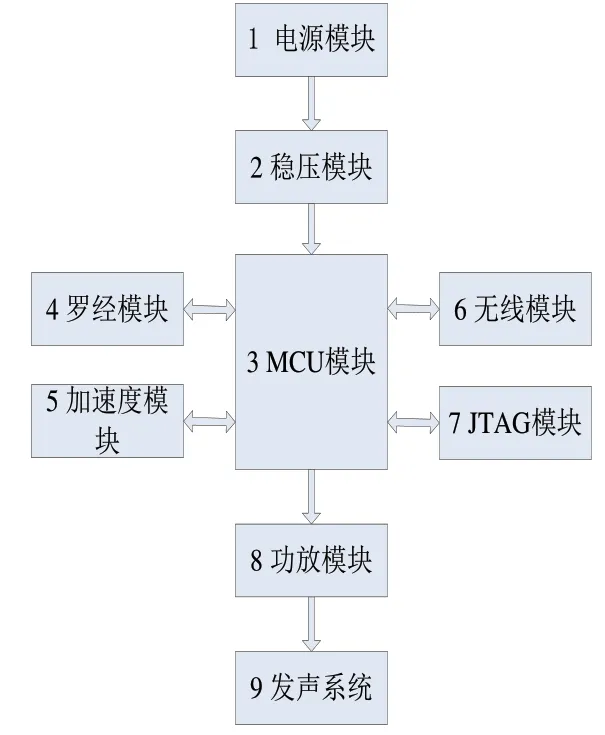
图3

图4
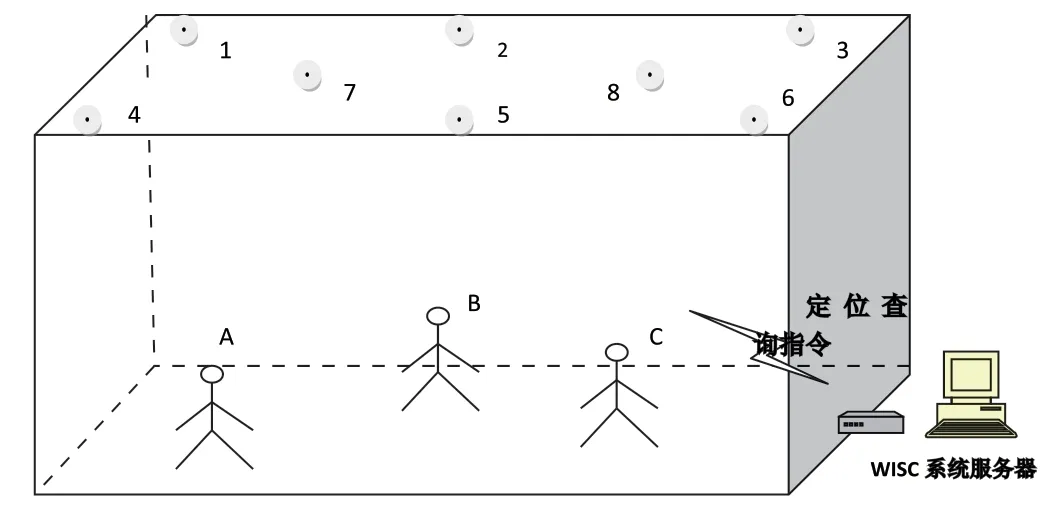
图5
研究结果和分析
在长8 米,宽4 米,高4 米的空间中搭建实验环境,如图5 所示。屋顶的1、2、3、4、5、6、7、8 号为超声波接收探头,传感定位单元的主要组成部分。A、B、C为带定位人员,人员各携带一枚声学定位标签。当各人员在室内开始移动,由WISC 系统每30ms 发送一次定位查询指令。
在标签接收到查询指令后通过单片机内部DA 发出26KHz 的超声波,其波形如图6,图7 反映单片机输出电压的电平特性。
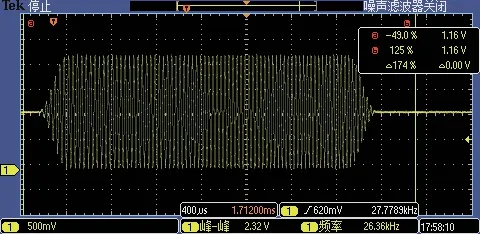
图6

图7
传感定位单元在接收到超声波信号后,将数据传给WISC 系统。解算数据如表2 所示。
WISC 系统解算出的人员位置高度误差在5cm 内,平面位置误差在10cm 内,定位速度在30ms 内,人员朝向误差在5°以内。该精度能够满足室内人员定位要求。
小结
本文提出了一种室内人员定位系统的设计方案,该系统能满足多目标在快速移动中的跟踪定位。同时对位置解算方法作了深入研究,并且针对人员定位的特殊性增加了确定人员朝向的设计。在实际环境中对系统进行测试,测试结果表明能在30ms 内对多移动目标进行精确到10cm以内的定位,人员朝向确定误差在5°以内,可以满足人员室内定位的需求。
本系统可实际使用于室内反恐训练作战人员定位、煤矿井下人员管理及搜救定位、地下停车场车辆定位及舞台灯光跟踪演员时的人员定位等。