基于信息融合技术的空气质量检测系统
2013-12-30杜宇航何农跃
马 嫚,程 铅,陈 慧,杜宇航,刘 宾,3,何农跃*
(1.东南大学生物科学与医学工程系生物电子学国家重点实验室,南京210018;2.东南大学生物科学与医学工程系医学电子学实验室,南京210018;3.南京医科大学基础医学院生物医学工程系,南京210029)
我国的空气质量检测系统,基本上是从上世纪80年代开始兴起,与发达国家相比起步比较晚。近年来,国家对空气质量网络建设逐渐重视,部分省区和重点城市开展了检测站点的联网工作,当前国家空气质量检测网络主要以城市检测站为基础,然而,这种检测网络仍然存在许多问题,主要有以下几点:(1)目前我国所使用的一些空气质量检测装置很大一部分是采购国外厂家现有的检测装置,由于各家公司的协议或者软件互不兼容,并且拓展性差,安装形式、使用风格、数据格式、人机界面也各不相同,这就导致了移植到国内后使用效果比较差;(2)我国现有检测站点的数据采集基本上是基于电话MODEM拨号的方式进行,而该方式已经不能适应现代信息的传输,没有联网就无法进行数据的实时传输和自动调度;(3)国内大多数的环境空气质量自动检测系统中,模块化程度不高,系统的开发过程比较混乱,导致系统升级、再开发以及维护的工作量加大,最主要的是严重影响到系统检测项目和某些数据分析处理功能的添加和删除等等。
基于信息融合技术的空气质量检测系统正是为了解决上述困难[1-2]而开发设计的,能够大大提高环境监管和保护工作的效率。系统利用物联网技术[3],无线组网通信技术[4]等,通过空气质量智能分析平台来实现对区域内的空气质量检测、分析和异常处理。在不同区域安装若干个低功耗的空气质量检测模块,安全节能,可同时检测空气粉尘固体颗粒、空气温湿度、NH3、CO、CO2等指标,同时利用串口摄像头实时查看现场状况。软件利用Socket网络编程,采用客户端/服务器(C/S)架构实时远程监控,通过信息融合算法判断某种空气指标是否超过警戒线,若某个节点所在区域出现超过警戒线的情况,则节点可立即开启空气净化装置与通风装置,从而改善空气质量。
1 系统总体结构
本系统可划分为3部分,分别为感知层,网络层和应用层[5]。感知层主要实现识别物体和采集信息,包括粉尘传感器、CO传感器、NH3传感器、CO2传感器、摄像头和空气清新器,通过测量空气中粉尘、CO等的含量以及摄像头捕捉到的图片综合判断空气质量情况,对于室内可智能启动空气清新器以达到净化空气的作用。网络层包括无线通信模块,用来传输采集到的各个传感器的检测数据以及图片信息,同时进行数据处理。网络层分为一个父节点和多个子节点,子节点实现与各种传感器的数据通信,及与父节点建立连接,父节点实现与子节点和上位机通信。应用层包括计算机终端,负责接收信号并且分析处理。计算机终端采用C/S模式,界面实时显示采集的空气质量参数,系统软件采用信息融合算法可自行判断给出异常处理,判断是否开启空气净化装置或风扇。硬件原理框图如图1所示。
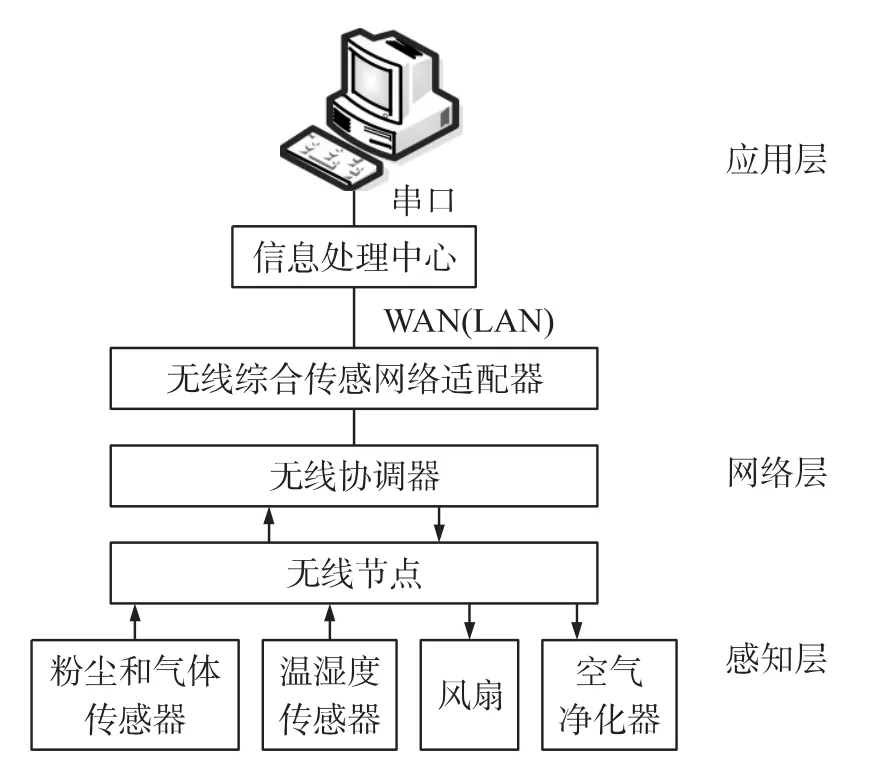
图1 系统硬件原理框图
2 硬件设计
硬件系统采用低功耗单片机CC430F5137处理,为16 bit超低功耗MCU,不但具有MSP430系列的低功耗性能,而且具有射频(RF)无线收发器的功能。通过处理器内部封装的CC1101无线收发模块将数据传至服务器端,实现对室内环境的温湿度、CO2、CO、NH3、粉尘颗粒浓度的实时检测。硬件连接图如图2所示。
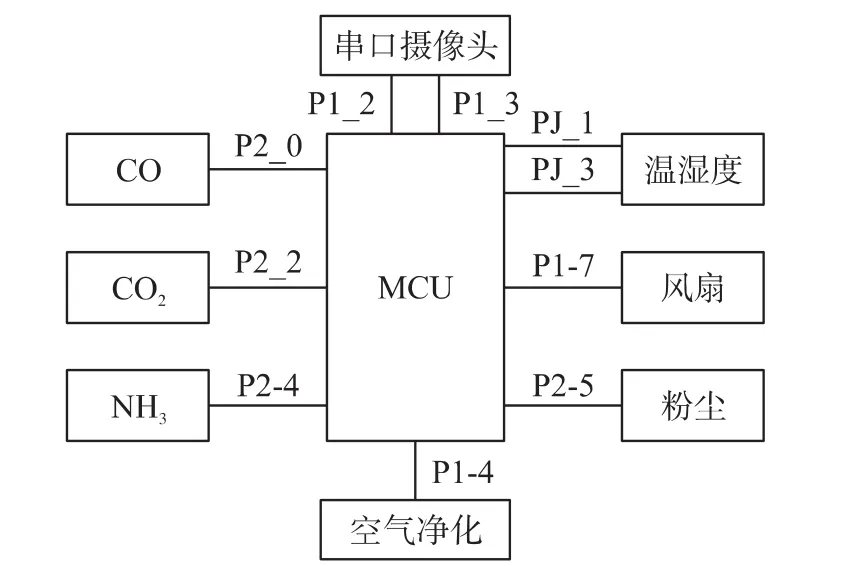
图2 系统硬件连接图
电路部分主要分为前端采集电路,无线传输模块与控制器电路3部分。前端采集电路包括传感器采集模块、串口摄像头和空气净化装置。控制器电路包括电源模块。
传感器采集模块主要包括粉尘传感器,温湿度传感器,几种气体传感器如CO2、CO、NH3等。粉尘传感器,采用SHARP GP2Y1010AU0F,该传感器可测量0.8 μm以上的微小粒子,例如感知烟草产生的烟气和花粉,房屋粉尘等。通过内嵌的高稳定激光信号源穿越烟道,然后照射烟尘粒子,这样被照射的烟尘粒子就会反射激光信号,而反射的信号强度正好与烟尘浓度成正比。通过检测烟尘反射过来的微弱激光信号,再用特定的算法[6]即可计算出烟道中烟尘的浓度。输出电压与粉尘浓度关系如下图3所示。
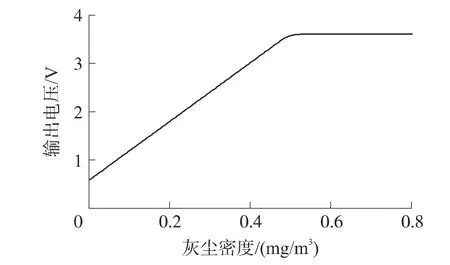
图3 输出电压和粉尘浓度关系曲线图
温湿度传感器[7],采用SHT10,这个传感器采用全部校准,数字输出,并且接口简单(2-wire),可实用性强。它基于IIC数据传输协议进行通信,响应速度快,功耗非常低,带有自动休眠功能,测量的湿度精度范围±45%RH,测量温度精度范围在±0.5℃(25℃)。
气体传感器[8]主要包括NH3传感器、CO2传感器、CO传感器等几种。其中NH3检测传感器采用MQ137,模拟量输出随浓度增加而增加,浓度越高电压越高,具有快速的响应恢复特性,测量范围是10×10-6~300×10-6,测量精度为1×10-6。CO2气体传感器采用MG811,这种传感器采用固体电解质电池原理,对CO2具有良好的灵敏度和选择性,受周围环境温湿度的变化影响较小,测量范围是0~10 000×10-6,测量精度为+5%。而CO传感器使用MQ-7传感器,该传感器采用高低温循环检测的方式低温(1.5V加热)检测CO,具有寿命长和可靠性高等特点,测量范围是 10×10-6~1 000×10-6,测量精度是其浓度斜率小于0.6。
无线传输模块是集成到MSP430中的CC1101无线收发器,它具有一个中低频接收机。接收到的RF信号由低噪声放大器放大,并在求积分(I和Q)过程中被降压转换至中频(IF)。在IF下,I/Q信号被模数转换器(ADC)数字化。自动增益控制,精确信道滤波和调制解调位/数据包同步均以数字化方式完成。发射器部分是基于RF频率的直接合成。频率合成器包含一个完全的片上LC压控振荡器和一个90°移相器,以便在接收模式下,向压降转换器生成I和Q的本地振荡器的信号。一个26 MHz警惕振荡器生成合成器的基准频率以及ADC数字部分的时钟信号。数字基带包括对频率配置,数据包处理和数据缓冲的支持。该无线传输模块实现信息的处理与传输,是物联网技术的重要组成部分。
电源模块主要采用多路输出的DC-DC可调电源模块,只需调节电位器的阻值,就可以改变电源模块的输出电压。操作简单,而且电源纹波小,稳定性高。本系统CO2气体传感器采用6 V供电,其他气体传感器采用5 V供电,空气净化装置采用9 V供电,微控制器采用3.3 V供电等,调节电源模块即可满足不同的电压需求。
3 软件设计
3.1 软件构架
软件是在基于Socket网络通信[9-10]的基础上用C++语言编制完成,实现系统功能。充分利用了软件本身所带的一些库函数,并采用模块化、结构化的设计思想,具有易读性,易于移植,功能模块可以很容易的扩展,易于二次开发的特点。软件设计部分,分为服务器端和客户端,将区域内的空气质量参数通过无线通信网络传输到远程服务器端,服务器实现将区域内的空气质量参数进行处理、分析、存储等工作,用户可以直接在服务器上观察其空气质量状况,也可以在客户端通过因特网访问服务器,以实现对区域内的空气质量进行实时的检测。客户端和服务器的界面设计直观、操作简便,用户可以很方便地实现空气质量的整体检测和重点防护等,这样,用户无论是在家里还是办公室内,或是出差在外,都可以了解区域内的环境质量。
根据软件的功能,可划分为用户主界面、用户管理、设备管理、数据库设计、网络连接5部分,如图4。客户端软件与其功能类似。用户主界面是系统提供给用户的操作界面;用户管理实现对客户访问权限的设置,同时存储用户信息方便再次登录使用,其包括用户登录、用户注销、用户配置;设备管理模块主要实现上位机与下位机的串口通信,启动数据采集,下位机的子节点设置等;数据库设计模块,能够方便用户保存、查阅、数据分析。而数据库完善地管理各子节点中不同传感器数据对象,具有强大的数据组织、用户管理、安全检查等功能;网络连接模块可以快速实现服务器与客户机之间的连接;用户不仅可以查看相应子节点某一时刻的数据,而且可以查看子节点上某一传感器在一天时间内数据的变化。数据库可以方便地生成各种数据对象,利用存储的数据建立窗体和报表,可视性好。另外,还可从数据库中导出数据,方便存储携带。
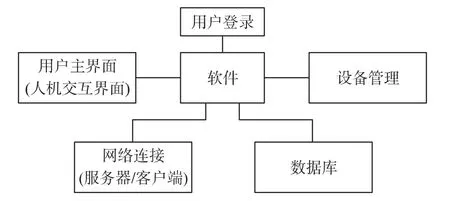
图4 系统软件功能图
3.2 信息融合算法
信息融合[11]是一种多层次、多方面的处理过程,包括对多源数据进行检测、相关、组合和估计,从而提高状态和特性估计的精度,方便有关决策。目前研究的多传感信息融合,主要是指利用计算机进行多源信息处理,从而得到可综合利用信息的理论和方法。本系统上位机软件采用多传感信息融合算法,对前端采集电路的多个子节点的多种传感器采集到的数据进行处理,进一步判断空气质量是否达标以采取相应的措施。
系统采集粉尘、气体、温湿度传感器的信号,充分利用不同时间与空间的多传感器数据资源,采用计算机技术,对在不同时间段获得的多传感器观测数据,在一定准则下进行分析、综合、支配和使用,获得对空气质量的描述和评估,进而根据此结果实现相应的决策和估计(例如打开风扇,空气净化装置等)。通过数据整合技术,使系统获得比它的各组成部分更充分的信息[12]。
就一个子节点来说,对单个传感器[13]在一定时间内采集的数据进行融合对整个系统检测精度产生很大的影响。在实际测量过程中由于时间点的不同及空间分布和自身的干扰性,传感器参量相对于系统采样频率而言,一般是具有正态分布的。采集单个传感器数值的真实值是决定空气质量好坏的依据。将等时间测量数据分成两组,根据分批估计理论可以得到同种传感器采集数据的融合值,即决策值,具体算法如下:
将单个传感器采集的n个观测值分为x11,x12,…,x1k和x21,x22,…,x2m,其中k+m=n(k,m≧ 2),两组样本测量值所对应的样本平均值分别为:
样品方差分别为:
X的估计值:

通过以上计算得到同一个子字节的各个传感器的局部决策值分别为,均方差分别为本系统采集6个空气参数指标,j=6。要得到最后的决策值,需要对多个字节点的同种传感器进行自适应加权平均法进行融合。这里,加权因子对融合结果影响比较明显,分配得当,融合结果就好,反之亦然。利用权的最优分配原则进行求解,融合结果理想。

总均方误差:

式中E表示数学期望。
对在式(7)下用拉格朗日乘法求极值,可达到
最小时对应的加权因子由
此可以计算该传感器在不同位置采集到的空气参数的估计值^x。以^x作为决策值来判断参数是否超标,进而做出反应,开启空气净化装置或风扇等。
4 实验结果
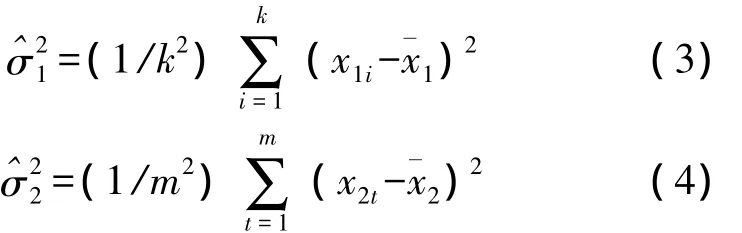
实验将系统组装在厂房沙盘模型中,如图5所示。在室内采集空气温湿度、CO、CO2、NH3的含量,因为室内空气颗粒物并不大,在模型上加盖一玻璃板,利用人为制造的烟雾采集粉尘含量。数据通过无线模块传送到服务器,自动进行数据分析,通过信息融合算法将最终结果显示在界面上。用户通过在客户端访问服务器可看到同样的数据显示。从数据库中导出的数据说明本设计方案是切实可行的,如表1。
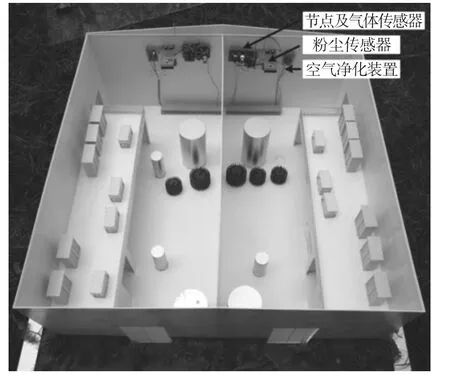
图5 系统实物图
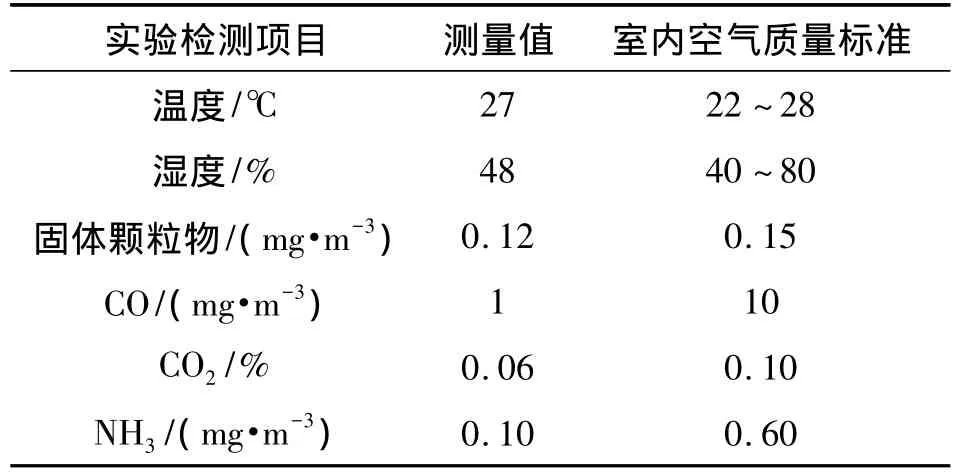
表1 空气质量监测参数
表1检测结果是系统在0.5 h内,多个子节点采集到的数据,在上位机的服务器端进行信息融合算法后,估计出的6个空气质量参数λ/x的值,显示在测量值中,符合当时室内的环境状况。为了验证该算法的准确性,本系统在相同时间间隔与环境下进行重复测量,分析统计计算后的数据,系统偏差均在0.03%以内,精确度良好。本系统能够完成实时空气质量检测。
5 总结与展望
本文在无线通信模块的基础上,利用物联网技术,无线通信技术,设计了基于信息融合技术的空气质量检测系统,实现对区域内不同方位的空气指标如可吸入颗粒物,有毒气体含量等的实时监控,实现现场使用和远程遥控。本系统数据采集实现无线化,减少了线路的铺设,通过网络进行实时检测,方便可靠,减少了人力的支出,具有突出的优点,这些都为本系统的应用提供了良好的宣传基础。但无线传输距离有限,可以采用更先进的无线设备进行改善。
[1]郭晓雷.城市空气质量预报方法研究综述[J].科技传播,2011,15:14-19.
[2]Fukushima H.Air Pollution Monitoring in East Asia[J].Science and Technology Trend,2006,18:54-64.
[3]马寅.物联网技术的特点与应用[J].物联网技术,2012(8):78-80.
[4]梁子君,宋志洪,张博,等.基于无线组网技术的交通信息采集方法研究[J].数字技术与应用,2011(12):39-41.
[5]孙其博,刘杰,黎羴,等.物联网:概念、架构与关键技术研究综述[J].北京邮电大学学报,2010,33(3):1-9.
[6]郑德忠,赵乐平.红外吸收粉尘传感器的设计[J].激光与红外,2012,42(9):1007-1010.
[7]林海军,滕召胜,杨圣洁,等.数字温度传感器自适应动态补偿方法[J].仪器仪表学报,2009,30(1):138-142.
[8]宋玲,施云波,修德斌,等.基于MSP430的气体传感器批量测试系统[J].电子测量技术,2009,32(10):77-80.
[9]刘俊,颜钢锋.基于Socket的网络编程技术及其实现[J].江南大学学报(自然科学版),2004,3(3):249-251.
[10]孙嘉骏,温强,郑美剑.基于 Winscok接口的局域网 Client/Server模型[J].科技风,2008,6:64-66.
[11]韩崇昭,朱红艳.多传感信息融合与自动化[J].自动化学报,2002,28:117-123.
[12]刘怿恒,欧亚军.基于传感器信息融合的只能小车壁障设计[J].电子世界,2012(6):4-5.
[13]朱明祥,陈照章,徐晓斌,等.基于多传感器信息融合的恒温箱测控系统设计[J].传感器与微系统,2010,29(3):439-433.
