地面三维激光扫描技术在汽车试验场路面采样测量中的应用研究①
2013-12-29罗永权
摘 要:结合应用实例利用地面三维激光扫描技术进行汽车试验场路面采样,生成高精度、高密度的断面线,通过运用三维激光扫描仪进行点云数据的采集以及后期数据处理方案的研究,表明三维激光扫描技术方案能克服传统测量方式缺点,保证测量数据质量,提高测量工作效率,为快速获取路面断面数据提供了一种全新的、可行、高效的测量技术手段,具有广阔的应用前景。
关键词:断面 全站仪 GPS-RTK 地面三维激光扫描技术 点云
中图分类号:P2 文献标识码:A 文章编号:1672-3791(2013)07(a)-0024-02
某汽车公司为获取中国的典型道路的路面状况,需要针对其选定的路段进行路面采样测量,提供路面任意方向间距为10 cm,精度为2 mm级的高精度断面线,作为汽车试验场内特殊道路设计的参考依据,选定的路段基本都是有破损、波浪起伏、车辆繁忙、桥头跳车或是颠簸路等路况,路面状况极不规则。不规则的路面状况,高密度和高精度的成果要求,给测量工作带来了严峻的挑战。
目前断面测量技术中,应用最多比较成熟的技术是利用全站仪断面测量和GPS-RTK断面测量。全站仪和GPS-RTK技术简单方便,生产效率也较高,在普通的工程测量中得到了广泛的应用,但是它是单点测量,测量的精度和密度都不是很高。显然应用这两种常规的成熟技术是无法满足汽车试验场路面高精度断面测量的要求,但随着地面三维激光扫描仪的出现,使得利用地面三维激光扫描技术解决上述问题成为可能。
1 地面三维激光扫描技术特点
地面三维激光扫描仪是一种非接触式主动测量系统,可进行大面积高密度空间三维数据的采集,具有点位测量精度高、采集空间点的密度大、速度快等特点,且其融合了激光反射强度和物体色彩等信息的三维激光影像数据,可对测量目标识别分析后,对采集得到的点云数据按照实际需求做进一步加工处理,生成满足客户需要的各种成果资料。地面三维激光扫描仪使测绘从传统的单点采集数据变为密集、连续的自动获取数据,为我们获取丰富的局部地面空间信息提NtunIbN8RFDoX3G1970lRA==供了一种全新的技术手段。地面三维激光扫描仪的这些特点,恰好可以使我们利用地面三维激光扫描技术,比较轻松的解决典型路段路面任意方向间距为10 cm,精度为2 mm级的高精度、高密度断面线测量问题。
2 实验情况
下面结合工程实例说明利用地面三维激光扫描技术获取路面任意方向间距为10 cm,精度为2 mm级的高精度断面线的过程。
2.1 外业数据采集
2.1.1 设备选取
Trimble GS200三维激光扫描仪用于路面三维坐标数据的采集,索佳SET4110无协作目标全站仪用于高精度测量特殊平面反射标志的三维坐标,供点云拼接时使用。
2.1.2 扫描分辨率的确定
由于扫描方向与路面不成垂直关系,在一个测站上的路面扫描必须分割成若干小块,以保证每小块的路面分辨率大致相同。同时由于是斜面扫描,分辨率不能直接设置为所要求的采样间隔,需要对每块测量区域按照公式r*H/S(H为仪器高,S为测量斜距,r为要求的采样间隔)计算结果设置仪器的采样间隔。
2.1.3 标靶与控制点布设
由于三维激光扫描仪的测程是有限的,一条道路的测量通常需要通过多站来完成,需要通过设置标靶,使不同测站的测量数据拼接到一起,因此需要在各个相邻站重合的位置布设3个以上不规则图形的标靶,以供点云拼接需要。控制点的三维坐标采用免棱镜全站仪布设。
2.1.4 路面及控制点扫描
根据Trimble GS200三维激光扫描仪主要技术指标,结合工程实际情况,将仪器安置于待扫描车道旁,仪器Y轴(扫描方向)尽量垂直于路面延伸方向。考虑到路面与扫描线之间垂直性很差,经测算,扫描仪每一测站左右方向路面扫描范围确定为30~40 m,即每站扫描60~80 m长的路面。当路面扫描密度、精度要求较高的情况下,适当进行重复扫描。在两个测站的扫描交接处路面两侧分别放置2个共4个特殊的球反射标志,球反射标志的空间位置呈不规则三边形和四边形,保证能有坚强的图形进行拼接,并且做到本测站与下一测站都能与4个球反射标志通视。另外,保证相邻测站间有一定的点云重叠区域,用于实现和保证测站间的扫描数据的准确拼接。考虑到扫描仪垂直视角的受限,仪器安置尽量与待扫描车道保持足够的距离,避免扫描死角,以减少工作量。当仪器只能安置在待扫描车道上的时候,仪器正前方死角区域则通过其它测站进行补扫。
2.2 内业数据处理
从点云到测绘成果的实现包括数据滤波、点云抽稀、点云拼接、DEM建模、纵横断面图生成。
2.2.1 数据滤波、点云抽稀
在数据采集过程中,由于行人和车辆经过时的遮挡,周围物体干扰等原因,产生了很多的错误数据,因此在建立路面模型前首先要剔出这些错误数据,使处理后的点云数据都是实际路面的测量数据和反射标志的数据。另外如果采集到的点云数据相对于工程本身过于密集,还可利用软件对数据进行抽稀处理,从而提高计算机的处理效率。
3.2.2 点云拼接
经过路面扫描数据预处理和球反射标志处理后,就可以将在多站测量的路面点云数据,通过设置在测站重叠处不规则的靶标拟合拼接在一起。利用已经布设、测量过的控制点三维坐标,将拼接后的点云纳入到我们所使用的坐标系中。
2.2.3 建立DEM模型,生成断面线
在经过拼接后的完整三维路面数据基础上,利用软件三维建模功能,生成路面不规则三角网三维模型(TIN)。然后利用软件中的纵、横断面工具,就可以在路面模型上根据需要(10 cm间隔)制作纵、横断面线。最后按行车方向设定桩号前进方向,将三维断面线转换成设计人员习惯使用的桩号+高程的二维数据。
值得注意的是通过扫描得到的点云数据量非常庞大,直接将整条路面生成路面模型在现阶段的个人计算机平台上并不现实,因此将需要将路面模型分段生成,再进行纵、横断面的制作,降低对设备的要求,提高作业的效率。
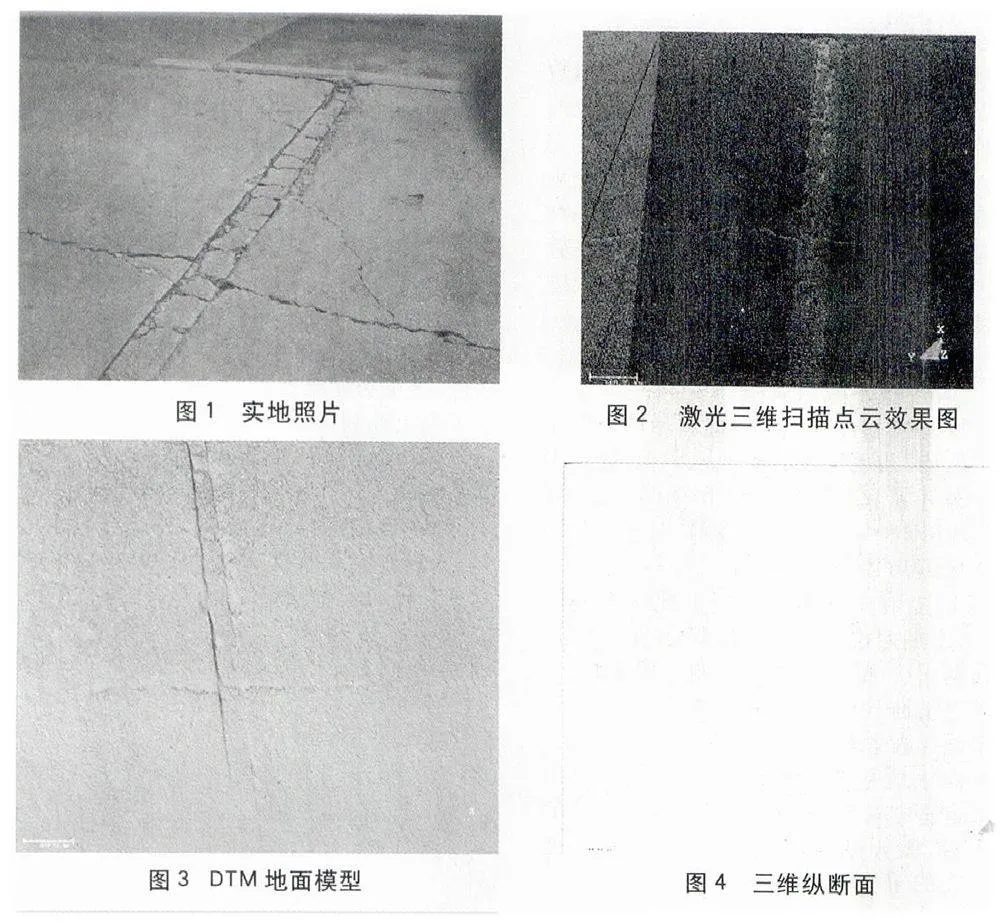
2.2.4 实验成果图(如图1~4)
2.2.5 实验结论
本次共对上海,重庆,北京三地12条路,3800 m长的路段设站58次,采样约2亿个点,成果中平均拼接精度仅为1.46 mm,平均点距仅有0.85 cm,在精度和密度上完全满足设计对测量工作的要求,为该汽车公司复制中国典型道路的路面状况,进行汽车试验场内特殊道路的设计提供了参考依据。
由上可见,三维激光扫描技术,通过与现代经典测量技术的相互融合,已经成为一种全新的空间数据采集手段,丰富了现有的测量作业手段,并且作业速度快、数据信息量大、精度高、采集过程安全简单、节省人力且具有强大的数据处理能力的特点,为测绘行业从传统的“低效率、低精度、全野外”向“高效率、高精度、数字化”的方向迈进提供了技术保证和设备支撑。
3 结语
尽管地面三维激光扫描技术被誉为“继GPS技术以后的又一次测绘技术的革命”,但在我国工程测量领域刚刚起步,其应用于常规性生产项目还缺少大量的实例支撑,因此缺乏相应的规范和标准,对数据规格、数据采集和后处理要求及成果精度评定办法等也没有相对统一的规定,同时也由于其高昂的设备价格,使许多的测绘生产单位望而却步,限制了该技术在测绘领域的发展。但随着测绘科学技术的进步,其相应的规范和标准会不断出台并完善,设备的性价比也会越来越高,相信该项技术和设备在常规测量生产中将具有广阔的发展空间。
参考文献
[1]马利,谢孔振,白文斌,等.地面三维激光扫描技术在道路工程测绘中的应用[J].北京测绘,2011,2.
[2]辛培建,韦宏鹄.三维激光扫描技术中点云拼接精度问题探讨[J].山西建筑,2012,3.
[3]杨欢庆.三维激光扫描技术在地下探测中的应用研究[J].中国市政工程,2013,1.
