着陆姿态对地外天体表层采样的影响研究
2013-12-29郑燕红邓湘金庞彧盛瑞卿郭璠
郑燕红 邓湘金 庞彧 盛瑞卿 郭璠
(北京空间飞行器总体设计部,北京 100094)
1 引言
我国探月工程确定了“绕、落、回”三步走的发展思路[1-2],从月球上采集样品返回地球进行科学分析将是我国深空探测技术中重要的一步。美国先后在多个月球和火星探测器上采用机械臂加表层采样器的形式,实现在月球、火星表面的样品采集。欧洲航天局(ESA)“火星快车”(Mars Express)的猎兔犬-2(Beagle-2)着陆器,携带4自由度机械臂,获取火星表面基础数据[3]。从国外成功实施的地外天体无人采样任务来看,表层采样技术是获得地外天体特性的重要手段,可配合完成我国未来的采样返回任务[4],是采样过程的一项关键技术。
地外天体表层采样装置通常采用二连杆机械臂加末端采样器的形式,具有多个回转自由度[5],实现表层土壤样品的采集与转移。考虑到深空探测的任务成本和技术,仅仅获取单一位置样品数据的回报较小,因此,通过一次任务获取尽可能多样化的样品数据[6],成为衡量表层采样装置性能的重要指标。而着陆器通常通过一套着陆缓冲机构实现软着陆[7],由于着陆缓冲的影响,着陆器上的表层采样装置相对于当地地平的位置、姿态均存在不确定性。目前,成功飞行的探测器中,“勘测者”(Surveyor)、海盗号(Viking)、凤凰号(Phoenix)的着陆器携带表层采样装置,但无多点采样要求,仅实现样品就位分析,无须完成一次封装的抓取与转移及样品返回准备工作;机遇号(Opportunity)、勇气号(Spirit)、好奇心号(Curiosity)的巡视器携带表层采样装置,可通过巡视器移动消除倾斜姿态的影响,实现多点表层采样[8-9]。本文研究的表层采样装置安装于着陆器上,主要实现样品的采集与转移,并完成样品返回地球准备工作中所需的一次封装转移等过程,重点探讨着陆姿态对表层采样可达区域、一次封装转移过程姿态的影响。
2 表层采样装置工作过程
本文研究的表层采样装置,由4 个关节(J1~J4)、2段连杆及末端采样器组成,如图1 所示。表层采样装置主要依靠关节J1(肩偏航)、关节J2(肩俯仰)、关节J3(肘俯仰)和关节J4(腕俯仰)的转动带动末端采样器到达期望采样点,实现对土壤样品的铲取或挖掘。

图1 表层采样装置示意图Fig.1 Surface sampling device sketch
采样前,表层采样装置的2段连杆收拢紧压在着陆器上,位于着陆器顶面A处的双目相机可对目标采样区域成像,通过三维重构算法获得目标采样区域的三维位置信息,并根据图像信息选取所关注的采样点。目标采样区域视觉信息获取完成后,表层采样装置解锁,位于顶面B处的二次封装装置开盖,如图2所示。

图2 表层采样及转移过程示意Fig.2 Surface sampling and deliver process sketch
采样过程中,驱动表层采样装置的前3个转动关节(J1~J3)运动至目标采样点,并通过关节J4回转带动末端采样器完成土壤样品的铲挖,如图2(a)所示。为避免土壤样品在转移过程中由于遗撒造成着陆器顶面设备受到污染,土壤样品的封装过程分两次完成。首先,通过表层采样装置的末端采样器将采集到的土壤样品转移至一次封装装置(位于着陆器侧面C处)中;在土壤样品采集量满足预定要求后,将一次封装装置关闭,利用末端采样器对其进行抓取,如图2(b)所示;将一次封装装置转移至二次封装装置(位于着陆器顶面B处)中,如图2(c)所示;在一次封装装置完全进入二次封装装置后,二次封装装置合盖,整个转移过程完成。
3 表层采样装置逆运动学分析
设着陆器在月面着陆后,参考坐标系为OXYZ,如图2所示,其原点O位于着陆器舱体底面中心,-X轴沿着陆点重力矢量方向,+Z轴位于着陆器的纵向平面内,垂直于+X轴,指向表层采样装置安装方向。设表层采样装置的基座坐标系为SX0Y0Z0,其中,+Z0轴与着陆器参考坐标系+X轴同向,+X0轴与参考坐标系+Z轴同向,+Y0轴与+Z0轴和+X0轴构成右手系,其原点S位于表层采样装置基座中心,从而可得OXYZ到SX0Y0Z0坐标系的变换矩阵为

式中:(x0,y0,z0)为表层采样装置基座中心在参考坐标系中的坐标。
按照D-H 坐标系定义方法,定义表层采样装置各关节处坐标系为J2X1Y1Z1,J3X2Y2Z2,J4X3Y3Z3,如图2所示,从而可得其D-H 参数,见表1。
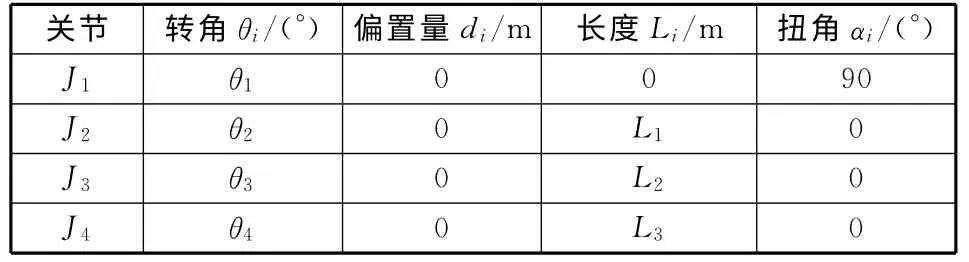
表1 表层采样装置回转关节D-H 参数Table 1 Rotation articulation D-H parameters of surface sampling device
由旋转变换[10]有

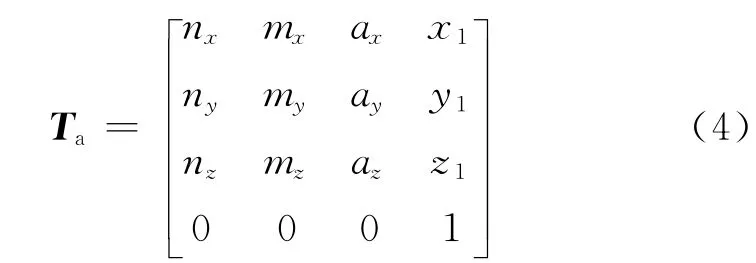
根据表层采样装置基座坐标系、关节坐标系的转换关系,可得从参考坐标系到末端采样器的变换矩阵为

式中:si和ci表示sinθi和cosθi;sij和cij表示sin(θi+θj)和cos(θi+θj);sijk和cijk表示sin(θi+θj+θk)和cos(θi+θj+θk);j,k=1,2,3,4。
设目标采样点的坐标为(x1,y1,z1),表层采样装置末端的坐标系单位向量为(n,m,a),由下标x,y,z表示其在参考坐标系的分量,则表层采样装置目标采样点的期望位置、姿态为
由式(3)、(4)中各元素的对应关系,可得

由T(2,4),T(3,4)与Ta(2,4),Ta(3,4)的对应关系,可得

从而可求解表层采样装置关节J2的转角θ2,并由T(1,2)与Ta(1,2)对应关系有

因此,在确定表层采样装置的目标采样点后,除分量nx外,其余姿态分量及表层采样装置关节转角,均可通过式(5)~(7)确定,而nx可根据表层采样过程的期望姿态确定。
4 着陆姿态对表层采样的影响
表层采样装置随着陆器一起下降到地外天体表面,由于地形、着陆质量与速度、着陆时刻姿态等因素,其着陆缓冲机构存在一定程度的压缩或拉伸,引起整个着陆器质心高度变化,同时,着陆器无法保证水平着陆姿态。该过程可近似简化为质心在纵向上的平动与绕质心的旋转运动。对于表层采样装置,由于着陆缓冲机构在水平压缩和倾斜压缩状态引起的质心纵向高度差异较小,在此忽略纵向平动。
设着陆器在缓冲机构的作用下,其极限倾角为δ,将参考坐标系沿+X轴平移至着陆器顶面(原点为着陆器顶面中心O′),表层采样装置基座安装点为S,如图3所示。可见,当着陆倾角在SO′X平面达到极限时,表层采样装置安装点S离着陆点表面距离最近或最远。由于在SO′X平面内转动的欧拉轴与SO′连线垂直,其方向矢量为
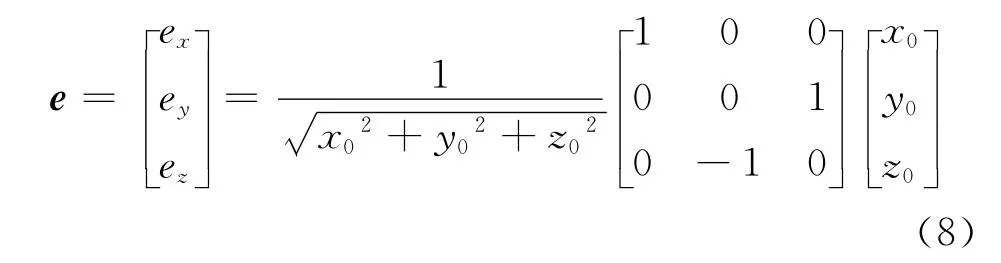
由欧拉轴/角参数式,可得其旋转矩阵为

式中:I为单位阵;E=
从而,当着陆姿态在SO′X平面发生δ角倾斜时,表层采样装置基座安装点的坐标为
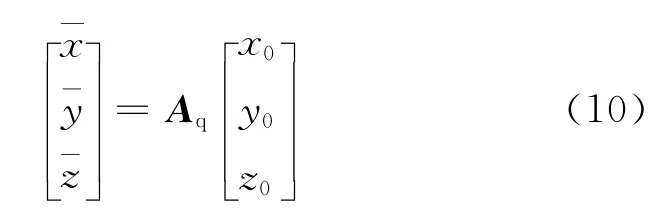
由于一次封装装置、二次封装装置均随着陆器本体在着陆过程中一起倾斜,它们在参考坐标系中的位置、姿态也发生了变化,因此式(10)也适用于一次封装装置、二次封装装置安装点位置坐标的计算。

图3 着陆姿态对表层采样装置安装点影响示意Fig.3 Sketch of landing attitude influence on surface sampling device mounting point
表层采样装置在连杆长度、各关节机械转角范围一定的情况下,安装基座在参考坐标系中的位置变化,将导致表层采样装置末端采样器在地外天体表面目标采样点可达区域的变化。此外,在末端采样器抓取一次封装装置过程中,要保持一次封装装置沿着陆器本体固定方向直线移动,才能顺利地从着陆器侧板解锁;在末端采样器向二次封装装置释放一次封装装置的过程中,由于二次封装装置的尺寸限制,应尽可能保证一次封装装置释放过程中的下降方向沿二次封装装置中心线。因此,表层采样装置在转移样品的过程中要完成特定的直线运动,而着陆缓冲过程中的不同着陆姿态给抓取、释放过程直线矢量带来了不确定性。当倾角为δ时,若一次封装装置高度为H1,关节J4距一次封装装置顶面距离为末端采样器长度L3,则末端的偏移量为

末端采样器要在该过程中实时进行姿态补偿,有

式中:nx为水平姿态下末端采样器期望的姿态分量。
考虑表层采样装置关节转角可能受到着陆器其他设备的机械约束,结合上述表层采样装置的逆运动学分析,可归纳影响分析算法如下。
步骤1:利用双目相机获取图像信息,并完成三维重构;根据着陆姿态,确定着陆倾角δ。
步骤2:根据着陆倾角δ、表层采样装置基座安装点在参考坐标系中的设计坐标(x0,y0,z0),结合式(10)确定安装点在参考坐标系中的坐标。
步骤3:计算表层采样装置在该着陆倾角下的采样可达区域,并与相机图像区域结合,选择表层采样目标区域。
步骤4:根据科学探测目标,在采样目标区域中选择目标采样点(x1,y1,z1)。
步骤5:根据式(5)、(12),确定目标姿态Ta。
步骤6:根据式(5)~(7),确定表层采样装置关节的备选转角θ1~θ4。
步骤7:对θ1~θ4是否满足机械约束要求进行校验;若不满足,回到步骤6,重新选择备选角度值。
步骤8:针对步骤4、5的位置、姿态要求,进行表层采样装置位置、姿态校验;若不满足,回到步骤6,重新选择备选角度值;当备选角度遍历,仍不满足位置、姿态要求时,输出该点不可达,若满足,输出关节回转角度,并记录该可达采样点。
5 仿真分析
设着陆器下底面中心距地面高度为700 mm,着陆器舱体高度为1300mm;表层采样装置安装于着陆器上顶面,其安装点在参考坐标系中的坐标为(1300,-900,900),支座高度为180mm;表层采样装置第1 连杆长度为1600 mm,第2 连杆长度为1400mm,末端采样器长度为80mm;一次封装装置高度为200mm,其底面安装中心在参考坐标系中的坐标为(700,-1100,700);二次封装装置底面安装中心在参考坐标系中的坐标为(1300,0,0)。设着陆极限倾角δ为8°,目标采样区域相机均可见;为避免表层采样装置与着陆缓冲机构等干涉,设表层采样装置第1转动关节运动范围为10°~110°。按照上述算法,可得水平着陆姿态下的可达区域如图4所示。着陆缓冲过程中,若+X轴向表层采样装置安装点方向倾斜+8°或-8°,其可达区域如图5所示。3种着陆姿态下表层采样装置的可采样区域对比,如图6所示。当着陆器向表层采样装置安装点方向倾斜+8°时,其可达区域面积约为水平着陆时的1.2倍,约为-8°倾斜时的2.8倍,可见着陆姿态对表层采样装置的目标采样区域选择有重要影响,为适应可能的着陆姿态,在设计时应选择水平、±8°倾斜姿态下可达区域的公共部分(见图6中阴影区域)作为备选的目标采样区域,其面积约为1.25m2。

图4 水平姿态下的可达区域Fig.4 Reachable area of horizontal attitude
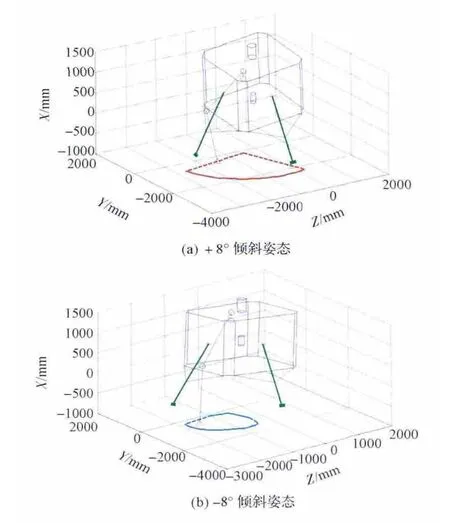
图5 倾斜姿态下的可达区域Fig.5 Reachable area of slope attitude
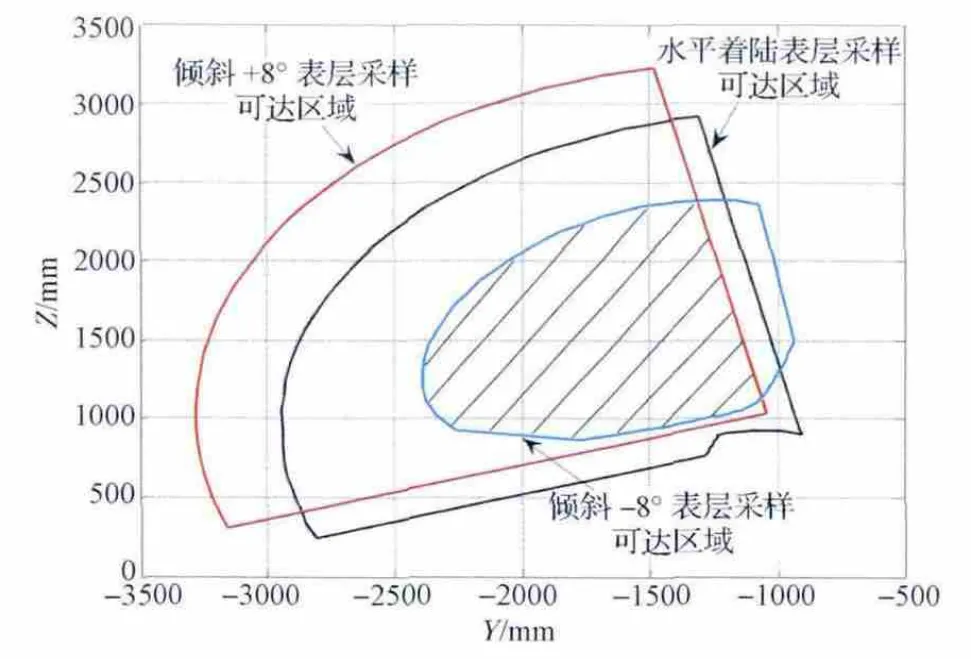
图6 水平和±8°倾斜姿态下的可达区域Fig.6 Reachable area of horizontal and±8°slope attitude
当着陆姿态引起的倾斜极限角度达到12°时,采样可达区域如图7所示,其公共区域(见图7中阴影区域)进一步缩小。通过仿真可得,当倾斜极限角度达到12.4°时,沿负向倾斜时无可达区域,可见,着陆缓冲机构的倾斜极限角度不能大于12.4°。
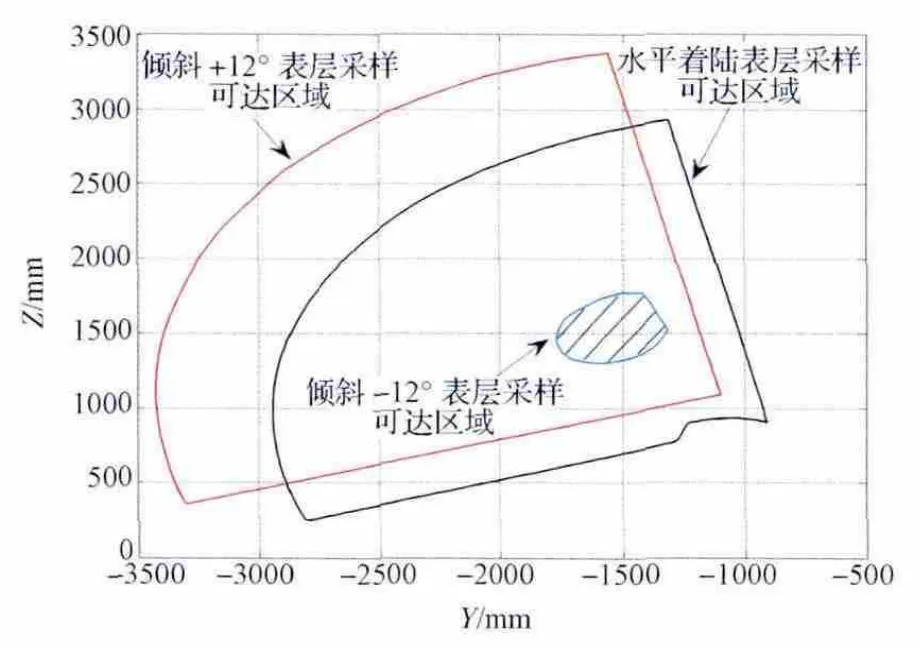
图7 水平和±12°倾斜姿态下的可达区域Fig.7 Reachable area of horizontal and±12°slope attitude
当着陆极限倾角为8°时,若不对末端采样器姿态修正,一次封装装置到达二次封装装置上方时,根据式(11)可得一次封装装置末端的偏移量约为39mm,因此,二次封装装置半径与一次封装装置半径之差大于该偏差值,才能保证一次封装装置在无补偿的情况下转移到二次封装装置内,而在实际应用中,考虑质量、体积以及飞行过程中晃动的约束,难以实现,可根据式(12)对倾斜姿态下末端采样器X轴方向姿态进行补偿。末端采样器在采样点、一次封装、二次封装处的采样装置位置、姿态,如图8所示。

图8 表层采样、抓取示意Fig.8 Surface sampling and snatching sketch
6 结束语
本文结合一种地外天体表层采样装置的工作过程,建立了表层采样装置的逆运动学模型,分析了着陆姿态对表层采样装置可达区域、一次封装装置抓取过程的影响,提出了仿真分析算法。从本文所提出算法的仿真示例看,当倾斜极限角度为8°时,表层采样装置可达区域最大值是最小值的2.8倍,在着陆器高度、表层采样装置状态一定的情况下,表层采样装置公共可达区域随倾斜极限角度的增大而缩小。在一次封装装置向二次封装装置转移过程中,当倾斜极限角度为8°时,表层采样装置末端补偿量约为39mm,且倾斜极限角度越大,末端补偿量越大。
(References)
[1]叶培建,彭兢.深空探测与我国深空探测展望[J].中国工程科学,2006,8(10):13-18
Ye Peijian,Peng Jing.Deep space exploration and its prospect in China [J].Engineering Science,2006,8(10):13-18(in Chinese)
[2]欧阳自远.我国月球探测的总体科学目标与发展战略[J].地球科学进展,2004,19(3):355-358
OuYang Ziyuan.Scentific objectives of Chinese lunar exploration project and development strategy[J].Advance in Earth Science,2004,19(3):355-358(in Chinese)
[3]叶培建,邓湘金,彭兢.国外深空探测态势特点与启示(上)[J].航天器环境工程,2008,25(5):403-405
Ye Peijian,Deng Xiangjin,Peng Jing.Features of deep space exploration in other countries and enlightenment for the development in China(part 1)[J].Spacecraft Environment Engineering,2008,25(5):403-405 (in Chinese)
[4]于登云,孙京,马兴瑞.空间机械臂技术及发展建议[J].航天器工程,2007,16(4):3-7
Yu Dengyun,Sun Jing,Ma Xingrui.Suggestion on development of Chinese space manipulator technology[J].Spacecraft Engineering,2007,16(4):3-7(in Chinese)
[5]Goldstein B,Pasadena C A,Shotwell R.Phoenix-the first Mars Scout Mission[C]//Proceedings of Aerospace Conference,2006IEEE.New York:IEEE,2006
[6]Howe S D,Brien R C,Ambrosi R M,et al.The Mars hopper:an impulse driven,long range,long-lived mobile platform utilizing in-situ Martian resources[J].Acta Astronautica,2011,69(11/12):1050-1056
[7]曾福明,杨建中,满剑锋,等.月球着陆器着陆缓冲机构设计方法研究[J].航天器工程,2011,20(2):46-51
Zeng Fuming,Yang Jianzhong,Man Jianfeng,et al.Study on design method of landing gear for lunar lander[J].Spacecraft Engineering,2011,20(2):46-51 (in Chinese)
[8]Badescu V.Mars prospective energy and material resources[M].Berlin Heidelberg:Springer,2009:432-456
[9]刘志全,庞彧,李新立.深空探测自动采样机构的特点及应用[J].航天器工程,2011,20(3):120-125
Liu Zhiquan,Pang Yu,Li Xinli.Characteristics and applications of automatic sampling mechanisms for deep space exploration[J].Spacecraft Engineering,2011,20(3):120-125(in Chinese)
[10]尼库.机器人学导论——分析、系统及应用[M].孙富春,朱纪洪,刘国栋,等译.北京:电子工业出版社,2004:62-63
Niku S B.Introduction to robotics:analysis,systems and applications[M].Sun Fuchun,Zhu Jihong,Liu Guodong,et al,translated.Beijing:Publishing House of Electronics Industry,2004:62-63(in Chinese)
