基于PLC的摊铺机电控系统改造设计
2013-12-23杨文刚
杨文刚
(山西交通职业技术学院,山西 太原 030031)
0 引言
某公司沥青混凝土摊铺机在施工过程中由于事故原因导致整车行走、转向、搅拌及发动机高低速控制等动作均无响应。停机检测发现整机主控电路板有明显的烧灼痕迹,需要更换。由于该摊铺机购买时间较早,原厂配件已经停产,需要重新设计电控系统。
1 摊铺机行驶控制系统
沥青混凝土摊铺机电控系统中,最为重要的是行驶系统控制器,它主要负责对摊铺机车体的方向与速度的自动控制。在摊铺机的工作过程中,保持前进速度的恒定至关重要,由于速度的偏差直接影响着路面施工的平整度,是衡量摊铺工程质量最为重要的指标。
摊铺机的速度变化主要受发动机转速、液压系统压力、液压系统容积变化和履带滑转率等因素的影响,为了克服这些因素引起的速度变化,行走控制系统均采用速度闭环控制来达到恒速摊铺[1]。原车行驶控制系统的结构框图如图1所示,通过左、右两组马达实现前进/后退、原地转向以及左右转向等行驶动作。

图1 原车行驶控制系统的结构框图
原车行走控制器的主要执行元件为控制变量泵的4个比例电磁阀,如图2所示。通过给定4个比例电磁阀不同的电流来控制泵的流量大小;通过4个比例阀的不同组合实现直线行走以及转向等动作;通过控制左、右两侧的两个马达换向阀X5、X6来完成液压马达的高速/低速转换,实现行走/摊铺两种不同工况;3个电位器RS、RT、RD分别用来作为最大行驶速度、驱动手柄位置、左右转向的输入元件;另外STR为原地转向输入,SP为行走/摊铺状态开关,当处于“摊铺”工况时,利用左右两个速度传感器将行驶速度vL、vR作为反馈信号反馈给控制器,由控制器中的算法计算得出X1~X4的给定值,实现恒速行驶和直线/转弯控制。
2 行驶控制系统硬件设计
为了匹配原车中的液压系统同时提供更高的安全系数,改进设计中采用了工控系统常用的西门子S7-300系列PLC作为控制主CPU,主要考虑到需要4路的PWM 输出信号分别为比例电磁阀X1~X4提供控制电流,另外要求有两路高速计数输入分别检测左、右两侧的行驶速度,故选择型号为6ES7 314C-2DP,另外该CPU 集成24DI/16DO、4AI/2AO,为控制系统提供了丰富的输入输出接口。改进后的控制系统结构图如图3所示[2]。

图2 行驶控制器

图3 改进后的控制系统结构图
3 行驶控制系统软件设计
目前用于摊铺机行驶驱动系统恒速控制的方法主要采用PID 控制策略,这种策略对行驶在稳速区域有较好的控制效果;而当摊铺机运行在变速区域时,一旦速度变化范围较大,采用固定参数的PID 控制策略就难以满足系统的动态性能要求;而Fuzzy控制策略引入逻辑推理,不依赖被控对象的精确数学模型,其自适应能力较强、响应快,对摊铺机变速运行工况有较好的控制效果。故在系统的设计中将Fuzzy控制和PID 控制策略结合起来,当行驶的设定速度和实际速度差值在较小的范围内变化时,采用CPU 内集成的PID 控制策略,保证控制的连续性和精确性;当差值超出这个范围时,则采用自编的Fuzzy控制策略,加速系统的收敛性能,从而使系统的稳态和动态性能都可以得到保障。
由于CPU 内部已经集成了PID 控制策略,故只对Fuzzy控制策略进行设计[3]。考虑到系统的准确性要求和CPU 的运行速度,选择了二位模糊控制器。以控制左侧履带行走的比例阀给定值的计算方法为例,将速度传感器反馈的数值(实际速度值)与履带的设定速度值之间的差值作为行驶速度偏差e,速度偏差变化率为ec,模糊化后的变量E 与EC作为Fuzzy控制器的输入变量,输出语言变量选择U,解模糊后得到比例阀给定电流参数u。由于原车摊铺速度小于等于6m/s,此处确定速度偏差的基本论域为(-6,6),将e、ec分为7种状态:负大、负中、负小、零、正小、正中、正大,分别表示为NB、NM、NS、ZE、PS、PM、PB,其模糊集合 为:e,ec={NB、NM、NS、ZE、PS、PM、PB}。设计过程中,误差的量化因子Ke和误差变化的量化因子Kc 对控制器的性能影响很大,反复仿真后,将Ke取值为1.5,Kc取值为0.84,隶属函数选择高灵敏度的三角函数,得到输入变量E 和EC的离散形式的隶属度赋值表,以及输出变量U 的隶属度赋值表。在选取控制量的过程中要注意防止超调,以系统的稳定性为出发点设计,模糊规则采用Mamdani规则,可以总结出模糊控制规则。在解模糊过程中,尽可能满足系统较高的实时性要求,采用最大隶属度平均值法进行模糊决策,通过计算可得u的取值。
4 控制系统仿真实验
利用摊铺机行驶驱动系统的数学模型[4],在MATLAB/Simulink中对系统进行动态仿真分析,其仿真系统结构如图4所示。

图4 系统仿真结构图
行驶控制系统仿真结果如图5所示,控制算法在阶跃响应作为扰动的情况下快速稳定,其实时性与稳定性均满足行走控制系统的要求,保证了行驶速度的恒定。
实际运行投入前,主要进行了直线行驶实验和恒速行驶实验[5]。当摊铺机行驶速度达到设定值5min后才开始记录行驶速度、行驶距离,直线行驶实验结果见表1。恒速行驶结果见表2。

图5 行驶控制系统仿真结果
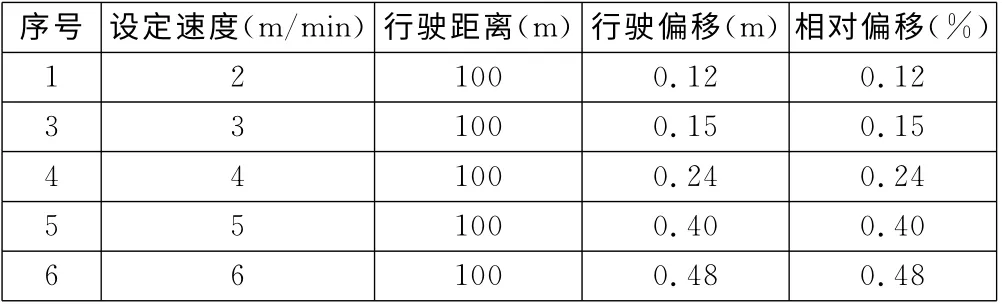
表1 直线行驶实验结果
测试结果表明,改造后的行驶控制系统具有较好的精度和稳定性,满足了现场的施工要求。
5 结论
在原有机械、液压系统保持不变的基础上,重新设计了摊铺机行走电气控制系统,采用了高可靠性的PLC作为主控制器,通过输出PWM 信号给4个比例电磁阀来实现摊铺机的各种行走动作,通过系统集成的PID控制策略和自编的Fuzzy控制策略来保障系统运行的稳定性和施工精度,仿真结果和运行结果均表明系统的正确性和有效性。该方法的难点是PLC 控制程序编写复杂,要求有较高的电气基础和编程能力,但同时也为类似的工程机械电控系统改造提供了一种解决方案,有一定的参考价值、实用性和经济意义。
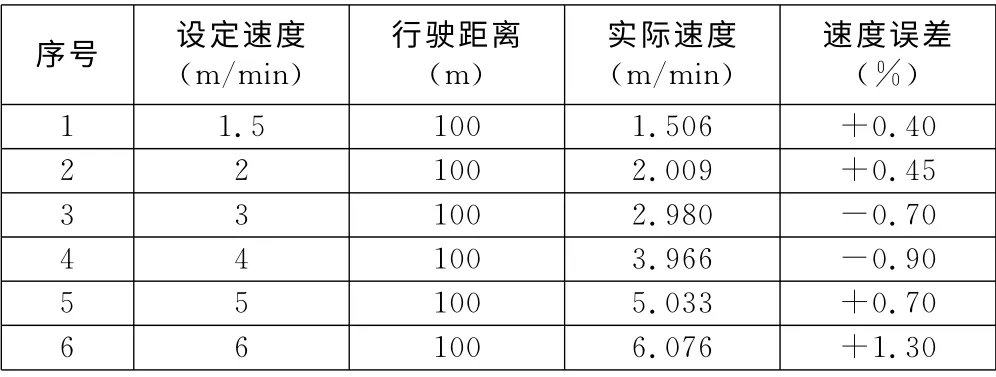
表2 恒速行驶实验结果
[1] 焦生杰.沥青混凝土摊铺机行驶系统模糊参数自整定PID 控制[J].长安大学学报,2003,23(2):91-94.
[2] 欧青立.沥青混凝土摊铺机Fuzzy-PID恒速控制[J].电子测量与仪器学报,2007(4):99-103.
[3] 石辛民.模糊控制及其Matlab仿真[M].北京:清华大学出版社,2008.
[4] 吕其惠.模糊控制在沥青混凝土摊铺机行驶系统智能控制中的应用[J].建筑机械,2007(3):55-57.
[5] 耿丽清.基于DSP的摊铺机行走数字控制系统设计[J].液压与气动,2009(4):25-27.
