基于虚拟仪器的直线电机创新实验平台设计
2013-12-23曹荣敏周惠兴吴迎年
曹荣敏,周惠兴,苏 昂,吴迎年,侯 明
(1.北京信息科技大学自动化学院,北京 100192;2.中国农业大学工学院,北京 100083;3.河南郑州微纳科技有限公司,河南郑州 451006)
实施科教兴国的战略必须不断推进教育创新,高等教育的任务是培养具有创新精神和实践能力的高级专门人才,实践教学对于提高学生的综合素质、培养学生的创新精神与实践能力具有特殊作用[1]。北京信息科技大学自2007年开始对实践教学进行改革和创新,通过教学与科研的结合与渗透,以高水平的科研带动教学,构成科研与教学互动的培养创新型工程人才的教学体系,并进一步推动深层次的教育教学改革,培养和造就具有创新能力的高素质人才。
随着实践教学改革的实施,北京信息科技大学自动化专业2008年成为北京市特色专业。2009年进入教育部第4批国家级特色专业建设点。2010年成为学校创新人才培养试点专业。2011年进入教育部第2批“卓越工程师教育培养计划”,成为我校首批进入卓越计划的2个专业之一。2012年“研华自动化校外人才培养基地”获批“北京市市级校外人才培养基地”,并进入北京市人才培养模式创新试验区。这些项目的实施有力地促进了自动化专业本科生科研能力的提高,推动北京信息科技大学自动化专业应用型人才培养的进一步深化。
本文设计的基于虚拟仪器的直线电机创新实验平台是基于直线伺服电机和在国际上广泛使用的先进的“硬件在回路”(harderware in loop,HIL)控制系统设计理念以及虚拟仪器技术设计而成,在教师科研成果的基础上,针对工程教育的改革,为本科生及研究生提供基于虚拟仪器的伺服驱动与精密运动控制技术方面最先进的实验装备,充分发挥学生的创造性,培养学生的动手和科研能力[2-3]。
1 创新实验平台的特点
本实验平台由直线电机驱动平台和直线电机倒立摆两大部分构成,直线电机倒立摆基于直线电机平台而开发,所有实验均基于直线电机平台和倒立摆开设。
1.1 以创新和实际能力培养为目标,分层次进行实验
创新实验平台可以完成的实验包括3个层次:第1层次满足教学的基础实验,第2层次是在基础实验基础上的综合实验,第3层次主要用于创新研究的创新实验。
第1层次的基础实验有:一级倒立摆的经典控制实验;一级倒立摆、二级倒立摆的现代控制实验;一级倒立摆、二级倒立摆的智能控制实验。基础实验与传统方式基本一致。
第2层次的综合实验主要也是基础实验,但具有综合性和创新性,综合实验相对较难,可以选做,或当作课程设计实验,鼓励学生(30%)组成团队参加。因为该层次实验只给出项目范围和期望目标,学生能力将得以充分发挥。综合、设计性实验项目的设置以培养学生对课程知识的综合、分析能力为目的。课程设计项目的设置与实用性及工程实践、新知识的工程应用紧密结合,培养学生分析、设计和动手能力。通过第2 层次的实验,学生不仅能够加深对基础知识的理解,而且能够充分体会团队的作用,培养团队合作精神。
第3层次的实验基于NI ELVIS的直线电机实验平台构建,为培养创新能力强、适应性强的自动化工程技术人才创造了必要的物质条件。该平台的创新实验主要为学有余力的本科生或研究生进行课题研究,其涉及的内容较多,需要学生花较多的时间进行自主创新和科学研究,主要培养学生的独立思考和深入研究能力。创新实验以项目的方式进行,鼓励优秀学生(约10%的学生)参加该层次实验,可以充分发挥这部分学生的科研和创新及动手能力[4]。
1.2 基础与提高相结合进行实验项目设置
实验项目分为基础和提高两部分,基础部分可作为必修课设置,它和基础理论教学课,如自动控制原理、现代控制理论、运动控制系统、虚拟仪器仪表等结合得相对比较密切;提高部分则可以作为选修课,也可以作为必修实验课,项目如伺服系统、先进控制理论、应用自适应控制、虚拟仪器实战项目训练等,没有明确的理论课与之相对应,主要培养学生的综合创新能力。这种创新课可面向全校信息类专业的学生开设,鼓励不同专业的学生组成团队完成实验项目。
1.3 实验研究与实际应用相结合
在虚拟仪器的直线电机创新实验平台的设计中,实验项目的设置以目前和将来的工业应用为主要目标,具有充分的实用性和超前性。基于实物仿真的直线电机平台系统和NI ELVIS系统均为目前工业上正在使用的最新的装备和系统,学生掌握的是目前工业领域真正所需要的知识。在完成实验的同时,高年级学生和研究生可以进行进一步的科学研究,还可以开发更多的实验项目。
虚拟仪器是测试技术、计算机技术及通信技术相结合的产物[5],是以计算机硬件和数据采集系统为基础并配以应用程序的一种软件和硬件的结合的技术,用来完成仪器的测量及相关功能[3]。NI ELVIS是在数据采集卡和LabVIEW 编程的基础上集成了实验常用仪器功能的虚拟仪器套件,是基于NI LabVIEW 而设计的实验平台,它嵌入了12种不同的仪器,有利于培养学生的创新实践能力。工作站平台为使用者提供了与电路联系的端口,可连接ELVIS软件上的虚拟仪器的输入输出口。同时提供了电源、LED、模拟输入输出、数字输入输出以及计数器端口,为不同层次的学生创造了开放式设计的条件。
LabVIEW 是一种图形化语言,提供了一个简单易学的仿真分析平台[6-7]。对于控制系统的分析和设计,NI公司开发了相应的工具包,借助于LabVIEW便捷的图形化编程语言使得控制系统的分析与综合更加方便,对于自动化专业的学生可将主要精力放在控制系统设计本身而不是过多地花时间在编程语法和指令上。
ELVIS目前基本上用于测量与仿真领域,它的采样频率为1kHz。由于它获取数据的可靠性及编制程序的方便性,创新实验平台的设计将它用于运动控制领域直线电机的控制中。
2 创新实验平台设计与配置
2.1 创新实验平台
直线电机与旋转电机相比,不需要把旋转运动变成直线运动的附加装置,因而系统结构简化,重量轻、体积小,而且可以实现直接传动,消除中间环节所带来的各种定位误差,定位精度高。另外,由于消除了定子、动子间的接触摩擦阻力,因而大大提高了系统的灵敏度、快速性和随动性。鉴于直线电机的特点,近年来受到广泛的关注,国外直线电机驱动技术已进入工业化阶段,开始广泛应用于工业领域[8]。
自动化专业实验的设计必须考虑其综合的特性,直线电机控制系统创新平台综合了机电、控制、计算机等学科知识,不仅可用于单学科实验,更适合于与本学科相关的创新实验和学生的创新能力培养,为本科生提供了伺服驱动与精密运动控制技术以及虚拟仪器方面最先进的实验装备,为研究生提供了直接驱动与运动控制研究的实验平台。设计的基于NI ELVIS直线电机控制系统创新平台如图1所示。

图1 基于NI ELVIS直线电机控制系统创新平台
创新实验平台所用的电机是郑州微纳科技有限公司研发的U 型永磁同步直线伺服电机(以下简称直线电机),实验平台由直线电机、机械运动平台、精密线性导轨、光栅编码器检测装置和数字伺服驱动器构成。直线电机的最大速度为1m/s,最大加速度为60m/s2,最大行程为380mm,额定推力为30N,峰值推力为80N,光栅的分辨率是5μm。
Elmo驱动器驱动直线电机,它是一种高效伺服驱动,能工作在电流、速度、位置模式下。在实验项目设计中,需要在Elmo Composer软件中进行设置。通过连接Elmo驱动到ELVIS的模拟输出口来控制直线电机。光栅传感器用来测量动子的位置以产生反馈。倒立摆系统在直线电机平台基础上搭建而成,如图2所示。在直线电机控制系统创新实验平台上,可以完成大部分与控制理论相关的实验,由于它和Lab-VIEW 结合,可以利用LabVIEW 资源搭建各种控制器,对不同的控制算法进行研究。

图2 直线倒立摆系统结构
2.2 直线倒立摆
直线电机驱动倒立摆是在直线电机驱动平台的基础上构建的倒立摆实验装置,一方面它可以完成传统倒立摆控制实验,另一方面如把倒立摆部分拆除,它就是一个直线电机创新实验平台,可实现各种运动控制。
倒立摆是一个典型的快速、多变量、非线性、强耦合、自然不稳定系统,必须采取有效的控制算法才能使之稳定。倒立摆在控制过程中,能有效反映诸如镇定性、鲁棒性、随动性以及跟踪等许多关键问题。因此人们常常利用倒立摆检验各种控制算法对不稳定性、非线性和快速系统的控制能力,以及各种控制算法的有效性。倒立摆的控制研究具有理论意义,多级摆控制是控制领域研究的难点。
对倒立摆系统进行研究,不仅具有理论意义,其类似的控制方法和技术还具有实际应用价值。其控制方法在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中的垂直度控制、卫星飞行中的姿态控制和一般工业应用等方面都具有广阔的应用及开发前景。
倒立摆几乎是所有工科专业的一个教学实验平台。自动控制原理是信息类工科专业的核心课程。但是,对于大四学生,自动控制原理既晦涩难懂,又枯燥无味,倒立摆实验平台以其简单明了的装置和实验,可以给学生一个对自动控制的感性认识,增加学生学习自动控制的兴趣。而且,倒立摆涉及到DSP、嵌入式系统、电子电路、电机、常用传感器、Matlab、VC、动力学等众多知识,学生既可借此学习相关知识,又可做相应的项目开发,提高动手能力。
3 控制系统设计
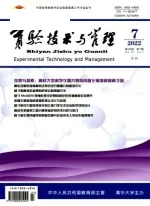
在创新实验平台中,控制倒立摆需要获取的有直线电机的位置和摆杆的角度。编码器输出的是差分信号,包括A+、A-、B+、B-,而ELVIS上的计数器端口需要接收单端信号,所以需要搭建一个转换电路,本文使用26LS32AM 芯片将转换差分信号转换为单端信号。图3是该芯片端口和逻辑图表。
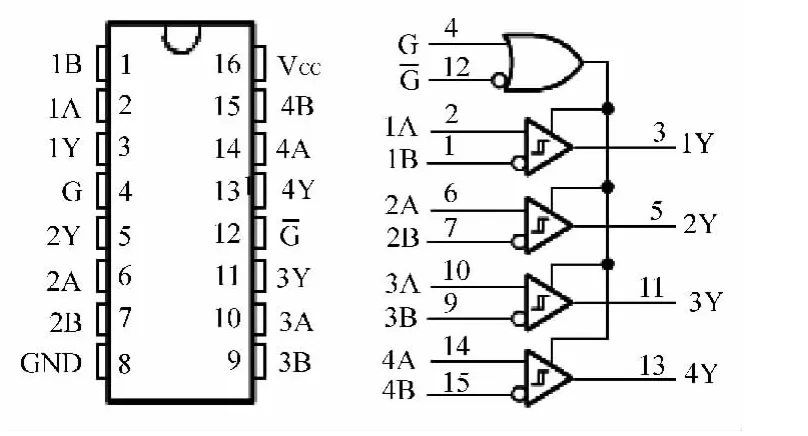
图3 26LS32AM 的端口和逻辑图表
在ELVIS的面包板上提供了5V 的电源,可以方便地构建图4的信号转换电路。
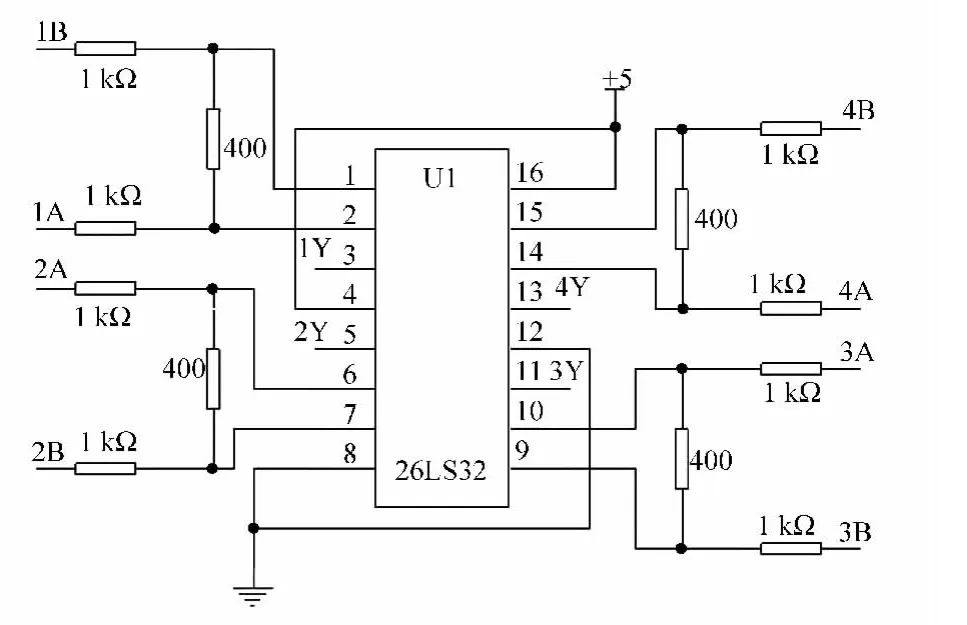
图4 信号转换电路
电路的输出信号需要连接到ELVIS的计数器“0”的端口,同时在倒立摆实验中需要用到计数器“1”来获取杆的角度。连线关系见表1。表1中的1Y—4Y 都在图4中示出,均为电路的输出信号。

表1 信号连接关系表
4 基础实验设计举例
为了直观地显示直线倒立摆当前位置和角度,使学生通过控制界面来了解控制效果,所以需要使用DAQ(data acquirement)任务。它可以通过建立物理通道任务DAQ 帮手来实现。同时也需要调用DAQ帮手来实现模拟输出任务。最后,ELVIS上的模拟输出端口需要连接到Elmo驱动器的模拟输入端[9]。
4.1 直线电机的PID 控制实验设计
由于PID 控制算法易于实现,所以在大多数领域被广泛使用。该创新平台的基础实验设计中也采用了PID 算法来跟踪正弦曲线以实现位置的跟踪。
直线电机位置控制程序的设计见图5,直线电机PID 位置跟踪的效果见图6。
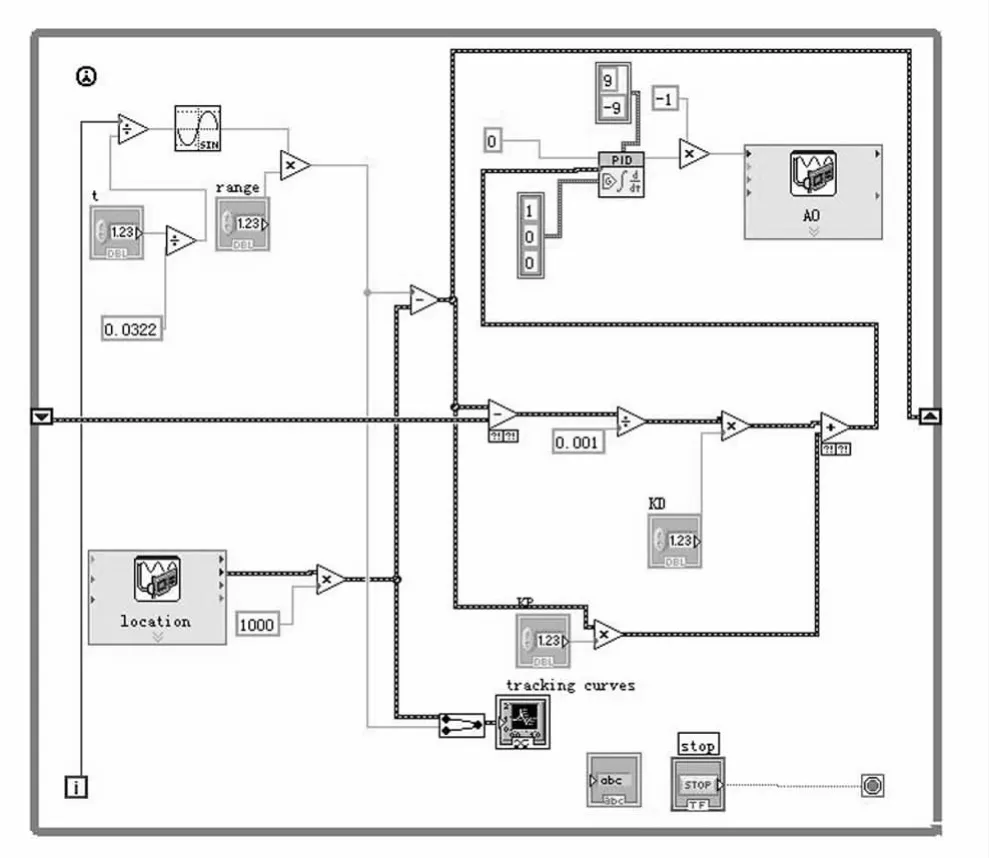
图5 控制程序

图6 前面板操作界面
图6中能够实时地观察到直线电机位置和设定曲线,能获取和改变PID 参数和曲线周期和幅值。学生可通过调节PID 参数,直观地观测位置跟踪的效果,根据跟踪误差的大小,确定系统是否能够平稳运行,控制效果是否满意,从而形象地理解自动控制理论以及参数对控制效果的影响。学生可以在此基础上,进行创新实验设计。通过编写LabVIEW 不同的程序,获得不同的控制界面,选择不同的控制算法,实现不同的控制效果,培养学生的实践和创新能力。
4.2 直线倒立摆的串级PID 控制实验设计
图7是在直线电机上加上倒立摆后构成的直线倒立摆控制系统的控制程序,在直线倒立摆的控制中,有1个电压输入信号,有2个输出信号(电机位置信号和摆杆角度信号),2个输出信号是相互耦合的,所以创新平台的基础实验采用了串级PID 控制策略。
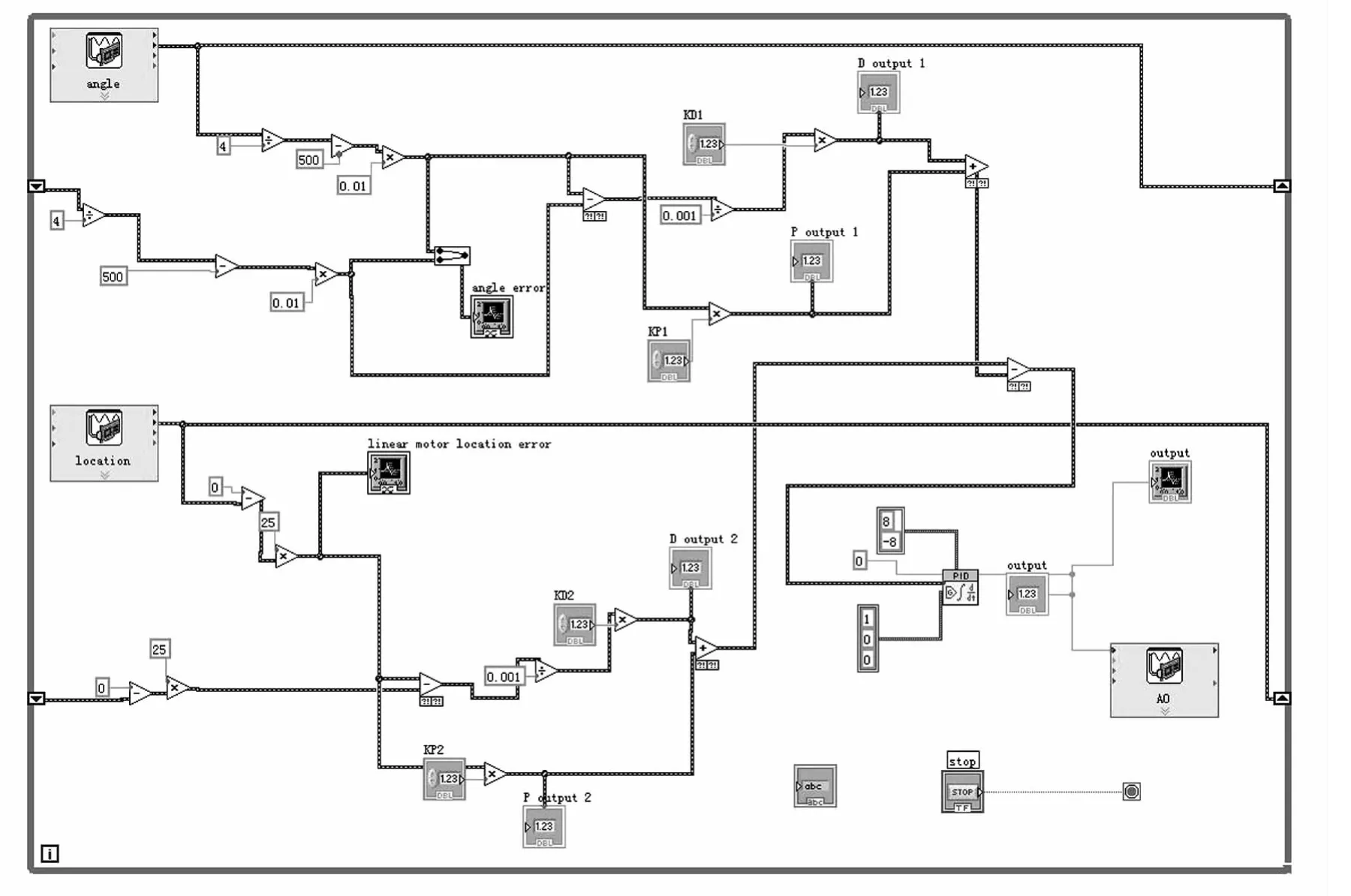
图7 倒立摆控制程序
经过调试参数的控制效果如图8所示,倒立摆稳定竖起。倒立摆在一定的角度范围内(大约5°),控制较为稳定。
图8 倒立摆运行结果
5 创新实验设计
创新实验分为直线电机平台实验和直线电机倒立摆实验,用于高年级本科生或研究生深入进行科研或者开展课题项目[10-13]。创新实验没有具体的实验步骤,只给出实验要求。创新实验共7个,其中直线电机平台实验2个,直线电机倒立摆实验5个。
5.1 提高直线电机跟踪精度的研究
通过新的控制方法或改进的控制算法,利用Lab-VIEW 编程,生成实时控制代码,对直线电机平台进行实物控制,目的是提高直线电机驱动平台运动控制精度。
5.2 DSP控制卡研究
直线电机平台采用TMS320F2812DSP作为主处理器的控制卡,该DSP 控制卡具有丰富的接口,并且配备有示例程序,与直线电机平台结合,在实践中学习DSP,可以进行伺服控制卡的开发、研究。利用平台的DSP控制卡可以进行下列创新研究实验:
(1)一级倒立摆基于LabVIEW 自动起摆创新实验。分析一级倒立摆自动起摆机理,基于LabVIEW设计控制和自动起摆方法。生成实时控制代码,进行实物控制。
(2)二级倒立摆的研究。二级倒立摆的控制难度很大,目前学生对倒立摆控制的研究多止于一级倒立摆,能够实现二级倒立摆实物控制的不多。而直线电机倒立摆由于其直接驱动方式,对控制算法的要求相比传统倒立摆更低,因此,学生可以在本实验平台上进行二级摆的研究。
(3)监控界面创新。直线电机倒立摆底层的通信协议均向用户开放,学生可以通过LabVIEW、VB、VC、Matlab等人机交互界面,编写直线电机倒立摆监控界面,设计自己喜欢的监控界面,呈现个性,激发学生的兴趣和创新潜能。
6 结束语
基于NI ELVIS的直线电机创新实验平台设计包括了国内外先进的技术,能提供更多实验,在实验教学中能很好地突出层次型、创新型的培养目标。该平台以伺服驱动技术发展前沿的直接伺服驱动技术为主,集中了NI ELVIS在运动控制领域的应用。该平台能实现直线电机跟踪正弦曲线和倒立摆控制的实验设计,同时能在实时窗口上观察各种信号并且对参数进行在线修改。对基础较薄弱学生可以直接利用基于虚拟仪器的“硬件在回路”控制系统进行运动控制、自动控制原理方面的实验;对实践能力较强的学生,可以利用基于虚拟仪器的“硬件在回路”控制系统选用不同的控制策略,自行设计控制卡并且利用LabVIEW 编写相应的软件,获得不同的控制界面,实现直线电机和直线倒立摆的控制。该平台为本科实验提供了技术上更先进、综合度更高、实验手段更加先进的实验项目,提高学生创新能力,为学生开展工程实践提供综合实验平台。
(
)
[1]马秀坤,张志芳,曹靖.自动化专业实验教育改革的探索与思考[J].中国教育技术装备,2007(2):16-17.
[2]尹仕,肖看,张雁明,等.依托大学生创新基地开展大学生创新项目的培育、管理及综合效应的研究[J].实验技术与管理,2012,29(11):18-21.
[3]曹荣敏,周惠兴,文华强,等.设计创新实验项目 培养工程创新能力[J].实验室研究与探索,2011,30(10):228-231.
[4]邢春芳,范秋凤.自动化专业实验实训室建设与实践教学体系改革[J].中国电力教育,2012,(32):99-100.
[5]丁硕.虚拟仪器技术在电子信息类实验教学中的应用[J].电子科技,2008,21(4):76-78.
[6]魏宏波,刘笃喜.基于虚拟仪器技术的测控教学实验系统的构建[J].计算机工程与设计,2008,29(5):1293-1295.
[7]申彦春,周浩淼,姚明林.虚拟仪器在实验教学中的应用[J].仪器仪表与分析监测,2008(1):22-24.
[8]王伟进.直线电机的发展与应用概述[J].微电机,2004,37(1):45-46.
[9]蒋书波,徐启.ELV IS在实验教学中的应用[J].应用天地,2007,26(9):59-61.
[10]梁霭明,马平,陈爱民,等.永磁直流直线电机的双闭环调速系统的设计与研究[J].机床与液压,2010(3):25-29.
[11]Pragasen Pillay,Ramu Krishnan.Application characteristics of permanent magnet synchronous and brushless dc motors for servo drives[J].IEEE Transactions on Industry Applications,1991,27(5):986-996.
[12]Song K,Liu W G,Luo G Z.dSPACE implementation of hardware in loop real-time simulation laboratory plants for motion control[J].Small &Special Electrical Machines,2008,2(4):28-31.
[13]Naso D,Cupertino F,Turchiano B.Precise position control of tubular linear motors with neural networks and composite learning[J].Control Engineering Practice,2010(18):515-522.