基于数字锁相环控制的硅微陀螺仪驱动模态分析与实验
2013-12-23王晓雷张印强李宏生
王晓雷 张印强,3 杨 成 李宏生
(1东南大学仪器科学与工程学院,南京210096)(2东南大学微惯性仪表与先进导航技术教育部重点实验室,南京210096)(3南京工业大学自动化与电气工程学院,南京 210009)
硅微陀螺仪具有体积小、成本低、功耗低、易于集成化等特点,被广泛应用于惯性技术测量和惯性导航等测控领域[1-2].根据哥氏效应原理,硅微陀螺仪的测量系统可分为驱动和检测2个模态,其中驱动振动是实现检测模态测量输入旋转角速度的前提,同时决定着测量的精准度.
由于受到温度等外界环境的影响,驱动模态的谐振频率会发生漂移.为了保证驱动信号的频率总是与驱动模态的谐振频率保持一致,通常采用闭环控制的方式对驱动信号频率进行控制.常用的控制方法有自激振荡[3]和锁相环控制[4]2种.自激振荡需要准确的360°移相形成自激环路,实现起来较为困难;同时,用于实现解调的正交信号一般由驱动检测振动信号移相90°得到,精度较低.而锁相环是基于相位控制的闭环控制系统,可以同时产生正交的2路信号,使用方便.但是,目前锁相环多采用模拟电路实现,容易出现失调误差和器件老化等问题,且灵活性差.数字锁相环由于采用软件编程实现,操作方便,易于修改和合成,更有利于实现高精度控制.
本文采用基于数字锁相环的相位控制方案,对硅微陀螺仪的驱动模态频率进行跟踪和控制,并通过仿真和实验验证了方案的可行性.
1 硅微陀螺仪驱动模态分析
线振动式硅微陀螺仪由2个正交的二阶机械振动[5-6]构成,可分别实现驱动模态和检测模态的功能,理想情况下可表示为
式中,m为振动质量块质量;cx,cy分别为x方向和y方向上的阻尼系数;kx,ky分别为x方向和y方向上的刚度;Fd为驱动信号的幅度;ωd为驱动信号的频率;Ωz为z轴旋转角速度;t为时间.
对驱动模态方程(1)求解,可得到驱动模态的振动幅值和相位分别为

由式(3)可知,当驱动信号的频率与驱动模态的谐振频率相等(即ωd=ωnx)时,驱动模态获得最大的能量转换.由式(2)可知,当输入角速度Ωz不为0时,增大驱动振动位移,可以提高检测模态振动的幅度,增加角速度的测量灵敏度.为了提高硅微陀螺仪驱动模态的能量转换效率和检测灵敏度,必须设计专门的控制电路,在频率上实现驱动信号频率与驱动模态谐振频率相等,在相位上满足φx=-90°.
由于温度变化等外界因素的影响,硅微陀螺仪驱动模态的谐振频率会发生偏移.以本实验室制造的硅微陀螺仪为例,当温度在-40~60 ℃内变化时,驱动模态的谐振频率变化量约为7 Hz.假设常温时驱动模态的谐振频率为3 139.4 Hz,当以固定的驱动频率进行驱动时,温度变化而导致的最大频率误差为2.23×10-3,故不能使驱动信号工作在驱动模态的谐振频率点上.因此,为了保证驱动信号以驱动模态谐振频率驱动硅微陀螺仪振动,必须采用闭环控制方式以保持驱动频率和驱动模态谐振频率一致.由式(4)可知,当驱动频率与驱动模态谐振频率不等时,驱动振动的相位也将发生偏移.通过正交解调的方法,能够方便地解出相位.由此可知,利用相位判断驱动模态是否处于谐振状态较容易实现.
2 基于PLL原理的频率控制
2.1 锁相环的基本原理
锁相环是根据输入信号与输出信号的相位差来控制振动信号频率的一种闭环控制系统,主要由鉴相器(PD)、环路滤波器(LPF)和压控振荡器(VCO)组成(见图1).其中,鉴相器用于比较输入信号ui(t)和输出信号uo(t)的相位关系,并生成含有相位差的信号ue(t);环路滤波器采用低通滤波器,滤掉鉴相器输出中的高频成分,得到稳定的相位偏差信号uc(t);压控振荡器是电压控制器件,根据输入电压的大小调整输出信号的频率.在锁相环回路中,当输入信号和输出信号的相位不一致时,由鉴相器和环路滤波器处理得到两者的相位差信号.以相位差信号作为压控振荡器的控制信号,及时调整压控振荡器输出信号的频率,使输出信号uo(t)与输入信号ui(t)的频率保持一致.

图1 锁相环原理图
2.2 硅微陀螺仪锁相环的控制原理
根据锁相环的基本原理,结合硅微陀螺仪驱动模态的特性方程,构建了控制驱动信号频率的锁相环相位控制方案,其原理图见图2.图中,Kvf为驱动电压到驱动力的转换系数;Kxv为驱动振动位移到驱动振动电压的转换系数.
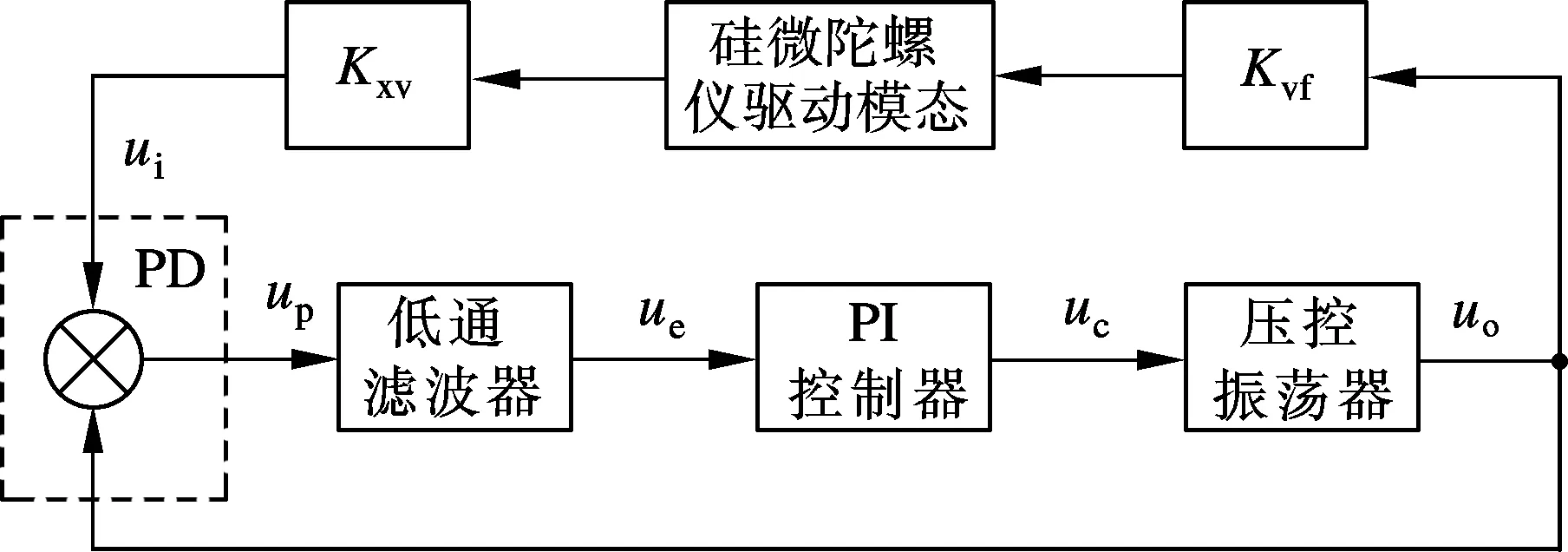
图2 基于锁相环控制的硅微陀螺仪原理图
由硅微陀螺仪的原理可知,当驱动信号的频率与驱动模态的谐振频率相等时,驱动检测信号的相位滞后于驱动信号90°.通过采用正交乘法解调的方法[7-8]可以求出两者的相位差.假设锁相环输入信号ui=cos(ωdt+θd),输出信号uo=sinωdt,其中,θd为驱动检测信号的相位,即偏离驱动模态谐振频率的相位.两信号相乘可得解调信号up,即
式(5)中包含了2倍频信号和含有相位信息的直流偏置信号,若通过低通滤波器滤除掉高频,则可得到含有相位信息的信号.当θd很小时,存在近似关系sinθd≈θd,故带有增益的相位信号(即相位误差ue)为
PI控制算法是一种有效控制误差变量的方法,由比例控制和积分控制构成.比例控制可以提高变化响应的快速性,积分控制则起到平均的作用,以减小稳态误差.当输入的相位误差信号发生变化时,PI控制器能够快速响应,这时,输出的控制电压为uc,且
式中,Kp和Ki分别为PI控制器的比例参数和积分参数.

振荡信号的产生可分为以下2步:① 对压控振荡器的输出频率积分,得到不同时刻的相位;② 根据不同时刻的相位,计算正弦或余弦值,即可产生时域正弦或余弦信号.在实际电路中,可由直接数字频率合成(DDS)算法实现,输出信号为
信号uo作为驱动电压信号,经Kvf转换为静电力,在谐振频率下驱动硅微陀螺仪振动.提取硅微陀螺仪振动位移,并经Kxv转换为驱动振动电压信号,此时,锁相环的输入与输出相位差为90°.因此,通过判断陀螺仪驱动电压和驱动振动电压的相位关系,可以实现硅微陀螺仪的锁相环闭环驱动控制.
2.3 硅微陀螺仪锁相环的相位控制
由于存在非线性环节,硅微陀螺仪锁相环闭环控制电路为非线性控制系统[9].由文献[10]可知,锁相环在锁定状态下具有线性特性.为了方便分析,构建线性系统分析锁相环的相位控制(见图3).图中,θi为输入相位,θo为输出相位,Ka为鉴相器的增益.

图3 锁相环相位控制线性模型低通滤波器LPF采用一阶低通实现,传递函数为
式中,ωc为转折频率;s为Laplace算子.
压控振荡器VCO的传递函数为
式中,Ko为积分系数.
因此,锁相环的开环增益为
其锁相环的闭环传递函数为
闭环控制系统的特征方程为
求解方程(14)得到如下2个根
由于ωc为滤波器的截止频率,ωc> 0,不论ωc2-4KaKoωc为何值,方程(14)的根都会具有负实部,闭环控制系统的极点均位于s左平面上,因此,锁相环闭环控制系统为渐进稳定系统.
随着温度等外界条件的变化,硅微陀螺仪的驱动模态谐振频率产生相应的阶跃响应.输入相位θi在t=0时刻发生阶跃变化,假设相位阶跃函数为

式中,u(t)为单位阶跃函数;Δφ为相位变量.该相位阶跃函数的拉氏变换为
因此,相位误差为
根据拉氏变换终值定理可知,当时间t趋向于无穷时有
因此,当t趋向于无穷时,相位误差趋向于0,即相位与输入相位保持一致.此时,输出频率也锁定在输入频率上,实现了对输入频率的自动跟踪.
3 电路仿真与实验
3.1 电路仿真
为了验证锁相环的跟踪特性,对硅微陀螺仪锁相环驱动控制技术进行仿真分析.图4为Matlab/Simulink环境下的仿真示意图.图中,fd为观测驱动频率.硅微陀螺仪驱动模态的初始谐振频率设为fnx=3 139.4 Hz,其他仿真参数分别设置为ωnx=2πfnx=1.972 5×104rad/s,Qx=2 000,m=0.667 mg,Kvf=1.45×10-7N/V,Kxv=8.75×105V/m,Ko=100 Hz/V,ωc=628 rad/s,Kp=10,Ki=0.04.
为了检验锁相环电路的闭环控制特性,设计了仿真实验.开始时,设置压控振荡器的中心频率较驱动模态谐振频率高100 Hz,经过1 s后,谐振频率增加10 Hz,观察锁相环的动态跟踪过程.
开始运行后,驱动频率与谐振频率之间存在频率差,导致锁相环检测到的硅微陀螺仪驱动信号与驱动检测信号不完全正交,存在非正交相位差.在锁相环的控制下,通过相位解调、低通滤波和PI 控制,得到对应的控制电压uc(见图5).由于频率差的存在,控制电压uc急剧下降.在uc的控制下,驱动信号频率迅速减小,直到与驱动模态谐振频率相等.此时,控制电压uc稳定下来,表明锁相环的输入信号和输出信号正交,硅微陀螺仪在驱动方向上处于谐振状态.运行至1 s时,硅微陀螺仪的谐振频率发生变化,根据驱动模态的相频特性,硅微陀螺仪驱动信号与驱动检测信号的相位差不等于90°,存在非正交的相位差.同样,经过锁相环的一系列信号处理,得到控制电压uc.在uc的作用下,VCO迅速调整驱动信号的频率,使驱动信号频率与驱动模态的谐振频率保持一致,从而实现对驱动模态谐振频率的跟踪和锁定.仿真中,锁相环的响应时间小于0.1 s,锁频范围大于100 Hz.

图4 硅微陀螺仪锁相环驱动模态仿真示意图
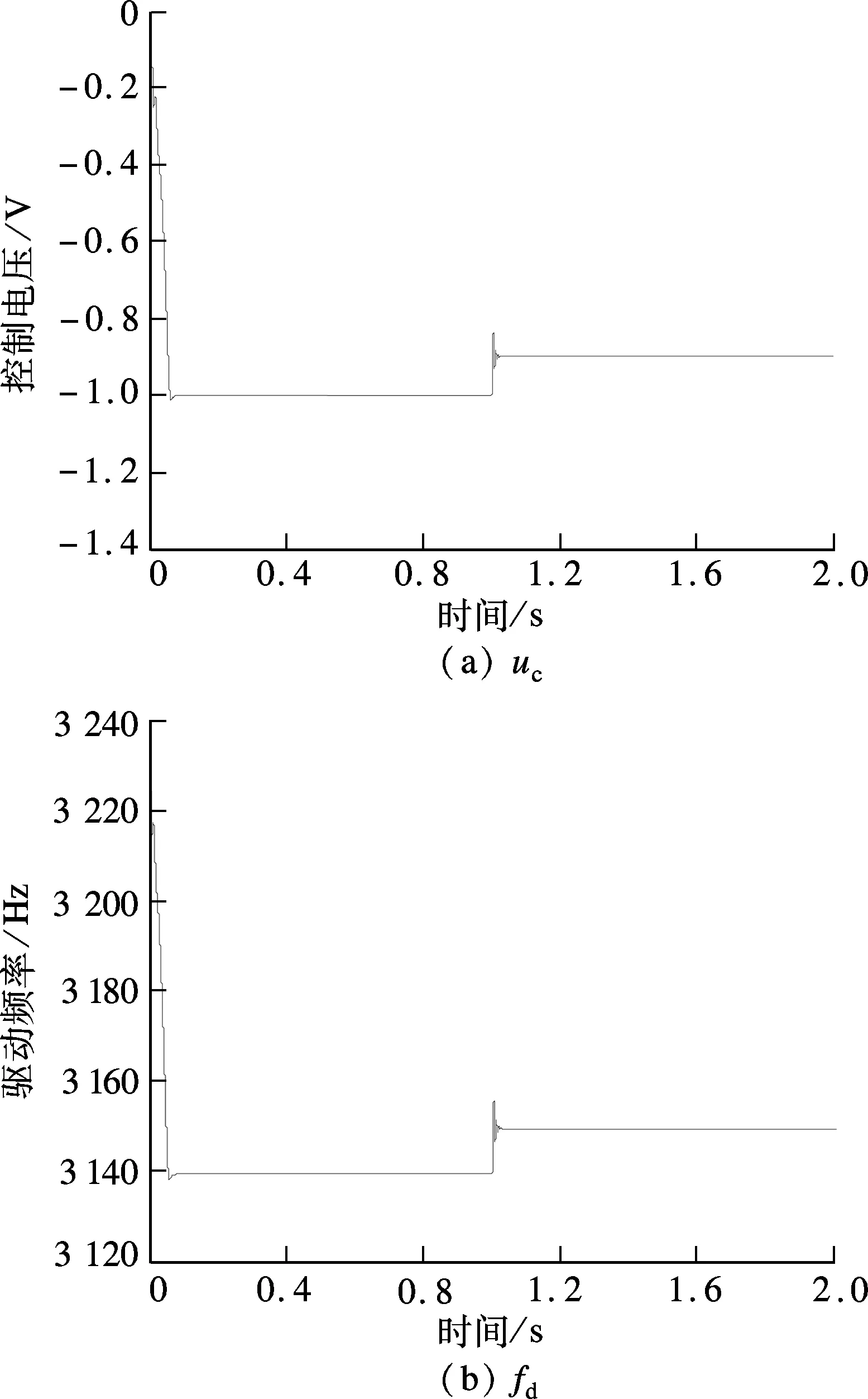
图5 锁相环控制的控制电压和频率变化曲线
3.2 实验
为了进一步验证锁相环控制的有效性,根据锁相环闭环控制原理,结合AGC幅度控制算法[11],设计了基于FPGA的电路控制方案(见图6).其中,FPGA选用Altera公司的Cyclone系列芯片,AD转换器和DA转换器分别采用24位和16位精度的转换芯片,硅微陀螺仪微结构采用本实验室研制的结构解耦双质量线振动硅微陀螺仪[12].图6中,ug为幅值增益控制信号.
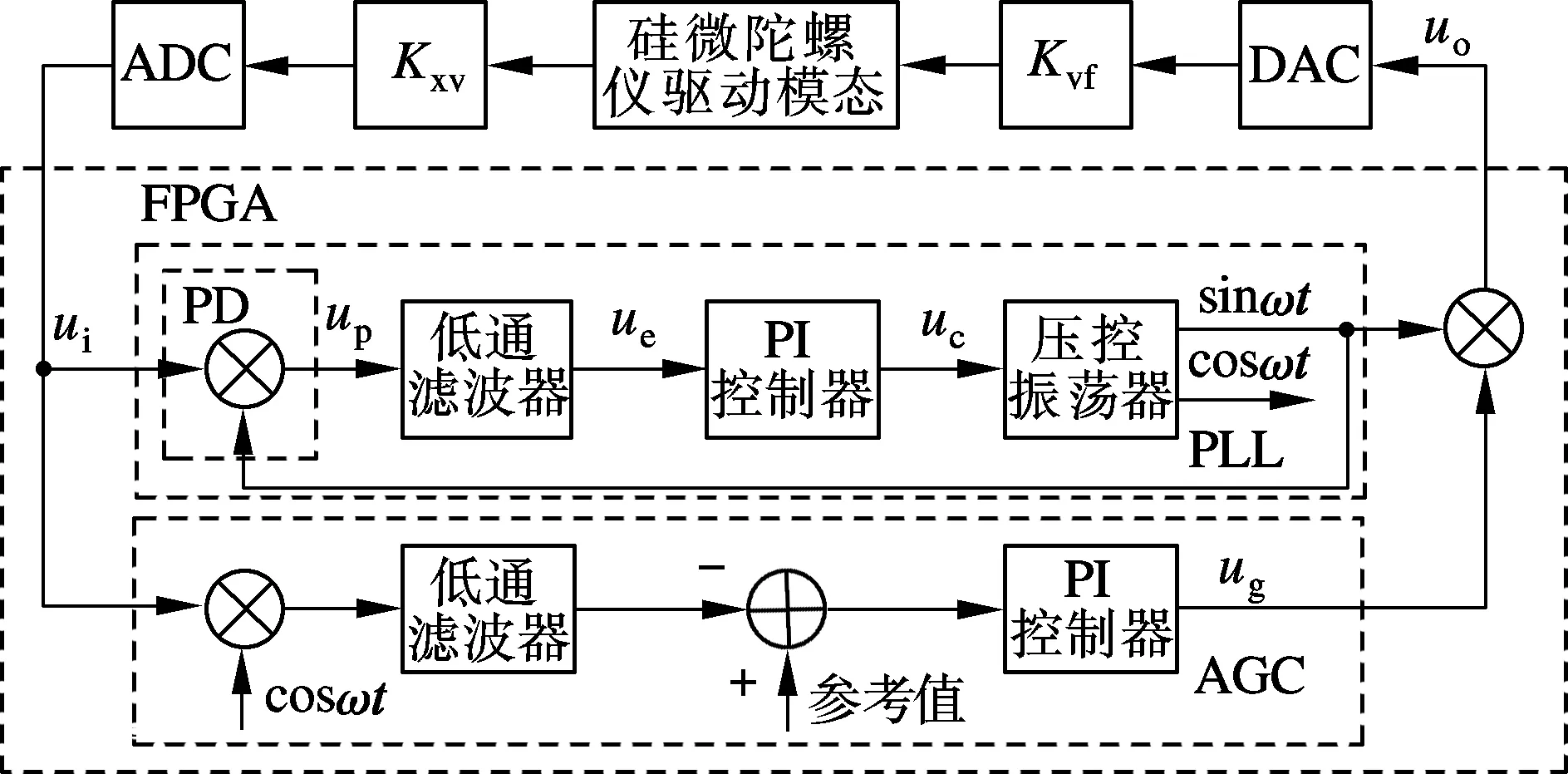
图6 锁相环控制硅微陀螺仪驱动模态方案
将硅微陀螺仪放置在温控箱内,通过调节温控箱的温度来改变硅微陀螺仪的环境温度,陀螺仪驱动模态的谐振频率也随之发生变化.实际使用的硅微陀螺仪及实验测试设备照片见图7.

图7 硅微陀螺仪及实验设备照片
开环驱动时,测试硅微陀螺仪的驱动模态谐振频率.首先,设置温控箱为60 ℃,保持30 min,使陀螺整体均匀受热.然后,以信号发生器产生的正弦波信号作为硅微陀螺仪的驱动信号,通过调整驱动信号频率,使驱动检测信号的有效值达到最大值,此时可认为驱动信号的频率与陀螺仪驱动模态的谐振频率相同,记录下驱动频率值.然后,将温控箱的温度依次设置为40,20,0,-20,-40 ℃,重复上述实验,得到各个温度测试点的驱动模态谐振频率.
闭环驱动时,测试硅微陀螺仪的驱动信号频率.首先,将温控箱升高到60 ℃,保持30 min.然后,使温控箱的温度以1 ℃/min的速度下降,降温过程中的驱动信号频率通过FPGA串口传送到计算机中,得到60~-40 ℃的温度曲线.在温度曲线中分别找到60,40,20,0,-20,-40 ℃对应的驱动信号频率,即为驱动模态闭环控制下各温度点对应的谐振频率.
硅微陀螺仪驱动模态的开环谐振频率和闭环驱动频率见表1.
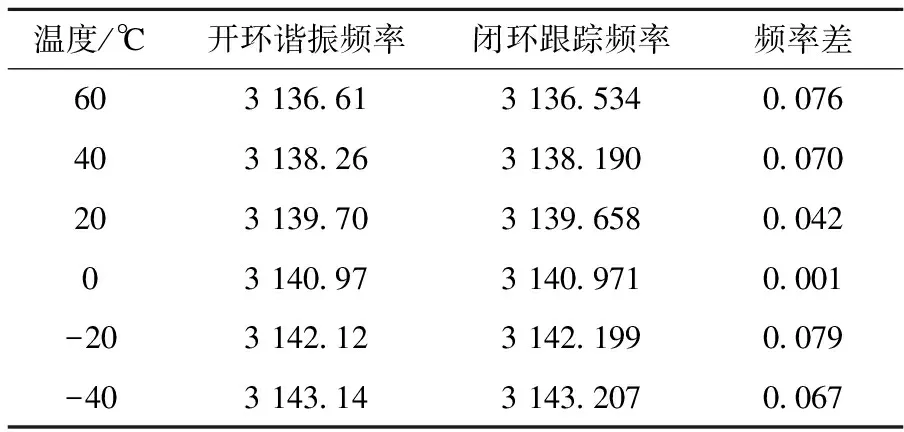
表1 开环谐振频率和闭环驱动频率 Hz
由表1可知,随着温度的下降,硅微陀螺仪驱动模态的谐振频率逐渐减小,并且在各个温度测试点上,驱动信号的频率与驱动模态的谐振频率的最大差值小于0.08 Hz,跟踪相对误差为2.5×10-5,说明锁相环频率跟踪系统能够较好地实现驱动信号频率对驱动模态谐振频率的跟踪.
由此可知,硅微陀螺仪驱动模态谐振频率变化跟踪实验结果与理论分析结果一致,表明锁相环闭环频率控制是可行的,且具有较高的动态控制精度.
4 结语
通过分析硅微陀螺仪的驱动模态控制方程特性,提出了一种基于数字锁相环技术控制驱动信号频率的方法.结合硅微陀螺仪数字锁相环闭环控制的原理,分析了锁相环频率控制的可行性和稳定性.在Matlab/Simulink环境下进行了锁相环闭环控制的仿真,并设计电路进行实验验证.结果表明,基于锁相环控制的硅微陀螺仪驱动信号能够时刻跟踪驱动模态谐振频率的变化,并锁定在谐振频率点上,其跟踪相对误差为2.5×10-5.因此,基于数字锁相环闭环控制的硅微陀螺仪频率控制是可行的.
)
[1] Yazdi N,Ayazi F,Najafi K. Micromachined inertial sensors[J].ProceedingsoftheIEEE,1998,86(8): 1640-1659.
[2] 丁衡高,王寿荣,黄庆安,等. 微惯性仪表技术的研究与发展[J]. 中国惯性技术学报,2001,9(4): 46-49,73.
Ding Henggao,Wang Shourong,Huang Qingan,et al. Research and development of micro inertial instruments[J].JournalofChineseInertialTechnology,2001,9(4): 46-49,73.(in Chinese)
[3] Wang Zhanfei,Li Zhihong,Lu Wengao. A new self-oscillation loop for MEMS vibratory gyroscopes[C]//Proceedingsofthe7thInternationalConferenceonASIC. Guilin,China,2007:1046-1049.
[4] Sung W T,Lee J Y,Lee J G,et al. Design and fabrication of an automatic mode controlled vibratory gyroscope[C]//Proceedingsofthe19thIEEEInternationalConferenceonMicroElectroMechanicalSystems. Istanbul,Turkey,2006: 674-677.
[5] Wang Xiaolei,Li Hongsheng,Xia Guoming,et al. Research and experiment on the drive frequency control of the MEMS gyroscope[C]//ProceedingsoftheSecondInternationalConferenceonMechanicAutomationandControlEngineering(MACE). Hohhot,China,2011:547-550.
[6] Northemann T,Maurer M,Ziegler A,et al. A phase-based amplitude regulation for gyroscope drive loops[C]//ProcediaEngineering. Linz,Austria,2010: 188-191.
[7] Shaban A,El-Badry M,El-Sayed A. Analysis and design of gyro-drive mode loop with amplitude control[C]//Proceedingsofthe4thInternationalDesignandTestWorkshop(IDT). Riyadh,Saudi Arabia,2009:1-4.
[8] Xia Guoming,Yang Bo,Wang Shourong. New digital drive phase control for improving bias stability of silicon MEMS gyrosocpe[J].JournalofSoutheastUniversity:EnglishEdition,2011,27(1):47-51.
[9] Sun X,Horowitz R,Komvopoulos K. Stability and resolution analysis of a phase-locked loop natural frequency tracking system for MEMS fatigue testing [J].JournalofDynamicSystems,Measurement,andControl,2002,124(4): 599-605.
[10] Best E R.Phase-lockedloops:design,simulation,andapplications[M].5th ed. New York: McGraw-Hill,2005.
[11] Sung Sangkyung,Sung Woon-Tahk,Lee Jang Gyu,et al. Vibratory gyroscope controller design via modified automatic gain control configuration[C]//Proceedingsof2007InternationalConferenceonControl,AutomationandSystems. Seoul,Korea,2007: 1363-1367.
[12] 殷勇,王寿荣,王存超,等. 结构解耦的双质量微陀螺仪结构方案设计与仿真[J]. 东南大学学报:自然科学版,2008,38(5): 918-922.
Yin Yong,Wang Shourong,Wang Cunchao,et al. Structural scheme design and simulation of structure-decoupled dual-mass MEMS gyroscope[J].JournalofSoutheastUniversity:NaturalScienceEdition,2008,38(5): 918-922. (in Chinese)
