基于自适应虚拟补偿的多电机动态协同控制*
2013-12-23丁惜瀛张泽宇张洪月裴延亮
丁惜瀛,于 华,张泽宇,张洪月,裴延亮
(沈阳工业大学 电气工程学院,沈阳 110870)
0 引言
四轮独立驱动电动汽车因其结构简单灵活、传动效率高以及在车辆动力控制上的优势,成为新一代电动汽车的发展趋势。但是在车辆行驶过程中,由于四轮独立驱动,多电机驱动系统受电机及传动部件特性差异、系统非线性、路况崎岖等影响,会引起四轮动态失衡,导致车辆跑偏甚至发生甩尾失控[1]。
四轮牵引电机的协同控制是提高车辆稳定性的重要手段。目前国内外学者对多电机动态协同控制进行了各方面研究。文献[2,3]根据车辆的行驶状态,采用自适应电子差速控制算法调节转向时内外轮的速度差,实现车辆精确的转向操纵;但由于四轮牵引电机控制系统相对独立,当任一牵引电机控制系统出现较大动态偏差时,车辆操纵稳定性难以保证。文献[4,5]提出对车辆姿态参数进行控制的方案,通过控制四轮电机的牵引力,产生车辆所需的惯性横摆力矩动态调整行驶姿态;该方案能够有效地提升车辆稳定性,但是在某些极限行驶状态下,单个或多个电机无法按操控指令提供所需的驱动力,四轮驱动力不平衡导致车辆稳定性及操纵准确性下降。
针对四轮独立驱动电动汽车极限状态下的操纵稳定性问题,从多电机协同控制的角度出发,提出基于自适应虚拟补偿的多电机动态协同控制方法。通过一个虚拟闭环,将任一牵引电机的跟踪误差,通过鲁棒自适应补偿控制器动态分配到四轮电机,协同控制四轮牵引电机的动态偏差,避免车辆轨迹大幅偏离驾驶指令。电机驱动系统采用直接转矩控制策略,结构简单、转矩响应快、对电机参数依赖性小、鲁棒性高。最后通过Matlab 仿真验证该方法的有效性。
1 永磁同步电机(PMSM)数学模型
永磁同步电机d-q 轴数学模型电压、磁链方程为:
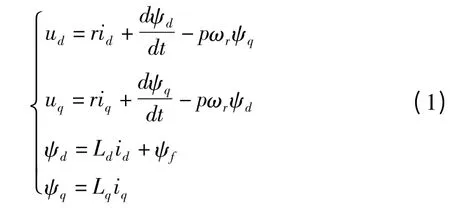
式中:ud,uq为d、q 轴的电压分量;id,iq为d、q 轴的电流分量;.ψd,.ψq为d、q 轴的磁链分量;.ψf为永磁体磁链;r 为定子每相绕组电阻;p 为电机极对数;ωr为电机转子的机械角速度;Ld,Lq为直轴与交轴的电感[6]。
d-q 轴上的电流方程为:
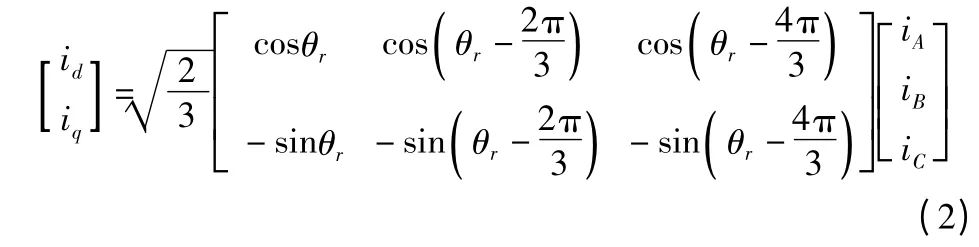
式中:θr为磁极位置,iA,iB,iC为定子绕组三相电流。
电机运动方程为:

式中:Te为电磁输出转矩;Tl为负载转矩;J 为转动惯量;B 为与转速成正比的摩擦及风阻转矩系数[7]。被控对象的传递函数为:

2 多电机动态协同控制
2.1 系统动态结构
系统如图1 所示,由鲁棒自适应虚拟补偿控制器、电子差速控制及四个牵引电机驱动控制系统组成。电子差速控制根据车速和转向角两个驾驶指令计算出四个牵引电机各自的转速给定;四轮电机牵引控制系统采用直接转矩控制实现快响应、高精度、无静差的跟随;鲁棒自适应虚拟补偿控制器通过虚拟闭环中引入四轮平均负荷,将任意电机过大的动态扰动平均补偿到四轮电机驱动系统,平衡四个牵引电机的动态偏差,实现四轮牵引电机的动态协同控制。图中Tl1,Tl2,Tl3,Tl4分别为来自路面与轮胎作用产生的负载扰动,Tf为虚拟闭环负载扰动,,为牵引电机转矩给定,Te1,Te2,Te3,Te4分别为四轮电机电磁转矩,ω* 为速度给定,ω 为虚拟速度,为四电机转速给定,ω1,ω2,ω3,ω4为四轮电机转速,δ 为前轮转角给定,K 为平衡参数。

图1 系统动态结构框图
2.2 牵引电机驱动系统
采用永磁同步电机(PMSM)驱动,控制方式选择结构简单、转矩响应快的直接转矩控制[8]。
电机的转矩为:

式中:Ls为定子电感;ψs,ψf分别为定子,转子磁链矢量;δsf为负载角。
直接转矩控制通过选择最佳电压矢量实时调节定子磁链的速度和转向,达到转矩控制的目的。图2为永磁同步电机直接转矩控制驱动原理图。
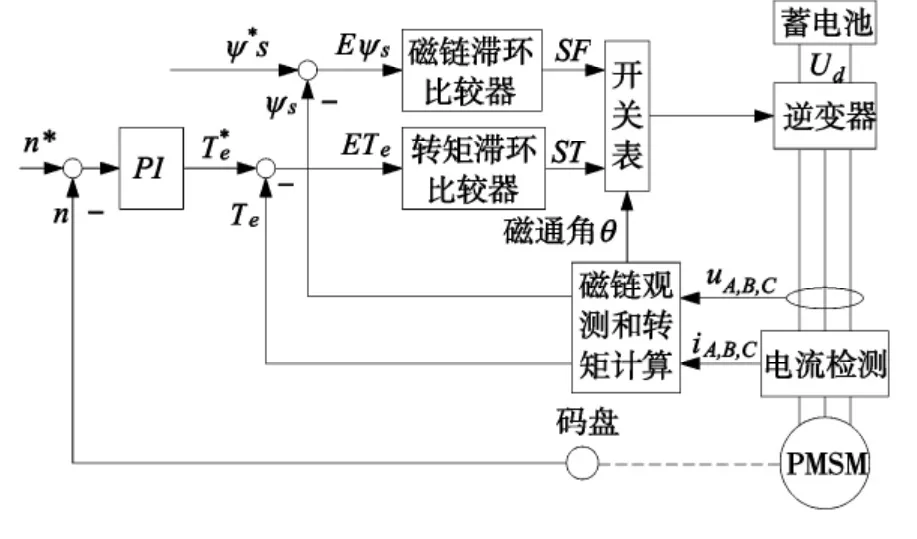
图2 永磁同步电机直接转矩控制驱动原理图
3 自适应虚拟补偿控制
针对电机驱动系统的非线性和不确定性,采用H∞鲁棒控制方法设计自适应虚拟补偿控制器,通过一个虚拟闭环,将扰动产生的动态偏差分配至四轮电机。
3.1 H∞加权混合灵敏度问题
自适应虚拟补偿闭环部分的H∞混合灵敏度设计问题如图3 所示。
图中:w 为负载扰动,z1,z2,z3为评价信号,K(s)为控制器,P(s)为被控对象,W1(s),W2(s),W3(s)分别为灵敏度函数S(s),控制信号灵敏度函数R(s)和互补灵敏度T(s)的加权函数。首先,考虑上图中混合灵敏度函数S/R/T 的设计[9]。定义为:

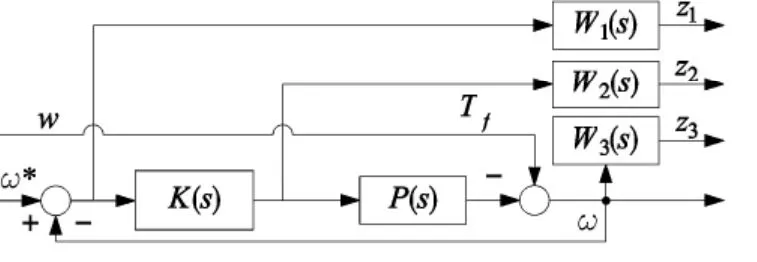
图3 自适应虚拟补偿闭环部分结构
选择目标函数为:
下面将式(6)代入F(P,K)推得广义被控对象G(s)如下:


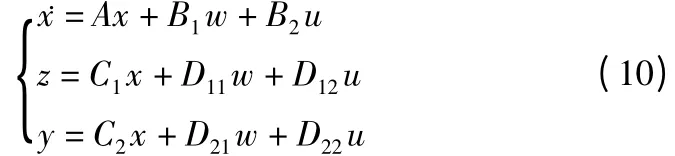
因此广义受控对象及其状态空间表达式为:
3.2 状态反馈H∞控制
针对以上广义被控对象G(s),转化为H∞标准控制问题。可得如下:
要求设计状态反馈控制器u =Kx 使得闭环系统内部稳定,需满足目标函数为:

由定理可知[10],对于上述式成立的充要条件是存在正定阵X >0,满足Riccati 不等式:

若上述不等式有正定阵X >0,则状态反馈控制器为:

3.3 H∞优化控制器的求解
加权函数W1(s)、W2(s)、W3(s)取为:

根据前文已知被控对象的传递函数和加权函数,利用Matlab 仿真软件的augtf()函数求出增广被控对象G(s)为:
式中:

最后利用Matlab 鲁棒工具箱求出鲁棒控制器为:

4 仿真研究
4.1 仿真参数
通过Matlab/Simulink 仿真验证控制系统的性能。表1 为车辆参数。

表1 仿真中的车辆参数
4.2 直行时任意轮负载突增的仿真研究
模拟电动汽车直行,在0.2s 时任意轮突增20N·m负载扰动,图4 ~图7 是转矩和转速曲线。
由图4 和图5 的转矩对比曲线可以看出,自适应虚拟补偿控制电机的起动转矩从35 N·m 降低到25N·m,尖峰电流下降;由图6 和图7 的转速对比曲线可以看出,未加虚拟补偿时,受扰车轮牵引电机转速下降,其他轮没有变化;而加入虚拟补偿后,扰动对四轮电机的影响接近,起动直到稳态时,四轮转速基本保持一致,证明在任意轮突增负载后系统实现了四轮转矩的动态分配。
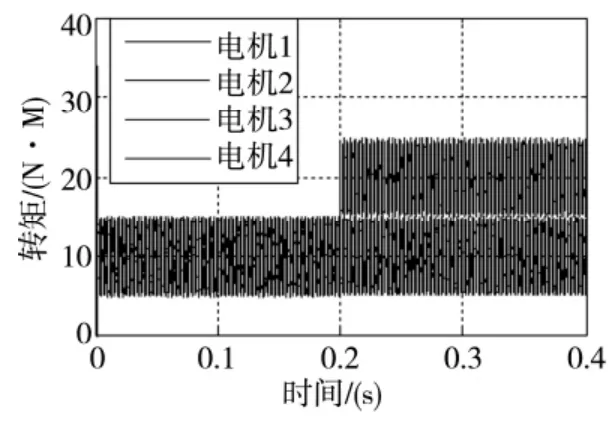
图4 独立牵引控制四电机驱动转矩

图5 自适应虚拟补偿控制四电机驱动转矩

图6 独立牵引控制四电机转速

图7 自适应虚拟补偿控制四电机转速
图8 为独立牵引控制和自适应虚拟补偿控制行驶轨迹曲线。由图可明显看出只采用独立牵引控制时因任意轮突增负载,车辆直线行驶轨迹将发生严重偏离,而自适应虚拟补偿控制后,即使任意轮突增负载车辆仍将保持直线行驶。
4.3 转向时任意轮突增负载的仿真研究
模拟车辆以前轮转角为6°进行转向行驶,在0.2s 时任意轮突增20 N·m的负载扰动,图9 ~图13为转矩和转速曲线。
由图9 ~图12 的转矩、转速对比曲线可以看出,在车辆稳定运行的基础上进行转向行驶时产生转速差,同时驱动转矩也产生瞬时尖峰,与转速的变化效果一致,并且在任意轮发生负载扰动的情况下,自适应虚拟补偿控制系统可实时进行四电机的驱动转矩和转速的动态实时调整,四轮转速同步变化,说明了此控制方法的有效性。

图8 独立牵引控制和自适应虚拟补偿控制行驶轨迹

图9 独立牵引控制四电机驱动转矩

图10 自适应虚拟补偿控制四电机驱动转矩
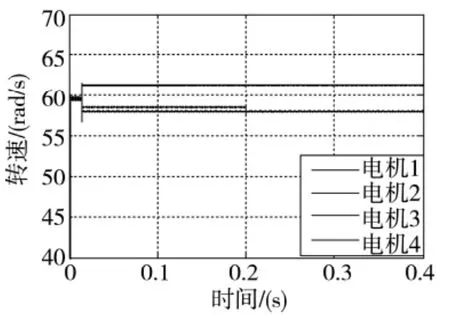
图11 独立牵引控制四电机转速

图12 自适应虚拟补偿控制四电机转速
图13 进一步说明了自适应虚拟补偿控制系统可实时纠正驾驶路径,避免车辆进入大幅度偏离的危险状态。
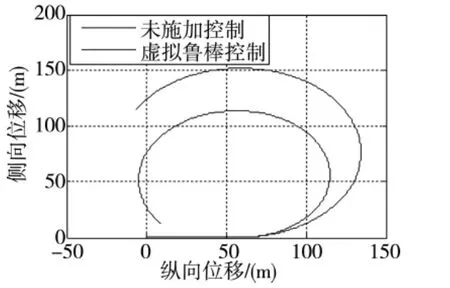
图13 独立牵引控制和自适应虚拟补偿控制行驶轨迹
5 结论
自适应虚拟补偿的多电机动态协同控制系统通过设计一个虚拟闭环系统,将任意轮产生的动态扰动进行平均分配至四轮电机,进行多电机的动态协同控制,实时纠正驾驶路径,有效提高了车辆的操纵稳定性,在不同行驶状态下,系统对路况崎岖引起的强扰动有良好的克服能力,对电机及传动部件特性差异引起的非线性有很好的鲁棒性。仿真分析表明,所设计的动态协同控制系统可以显著改善车辆行驶的横摆稳定性,动态响应速度快,控制精度高,有效提升了车辆对驾驶指令的跟踪能力。
[1]罗玉涛,张桂连,旷鹏,等. 四轮驱动汽车操纵稳定性级联式控制策略的研究[J]. 汽车工程,2009,31(9):807-811.
[2]Bekheira Tabbache,Abdelaziz Kheloui.An adaptive electric differential for electric vehicles motion stabilization[J]. IEEE Transactions on Vehicular Technology,2010,60(1):104-110.
[3]Abdelhakim Haddoun,Hachemi Benbouzid.Modeling analysis and neural network control of an EV electrical differential[J]. IEEE Transactions On Industrial Electronics,2008,55(6):2286-2294.
[4]丁惜瀛,张钦爽,覃艳丽. 基于转矩分配的电动汽车横摆稳定性控制[J]. 大功率变流技术,2011(5):41-44.
[5]Cong Geng,Lotfi Mostefai,Yoichi Hori. direct yaw moment control of an in-wheel-motored electric vehicle based on Body Slip Angle Fuzzy Observer[J]. IEEE Transactions on Industrial Electronics,2009,56(6):1411-1419.
[6]王洋,刘永光. 基于Smiulink 的永磁同步电机矢量控制系统仿真[J]. 组合机床与自动化加工技术,2011(2):78-82.
[7]叶汉民,时晓霞. 基于MRAS 技术在永磁同步电机控制中的应用[J]. 组合机床与自动化加工技术,2010(4):68-71.
[8]崔皆凡,王贺敏,王成元. 基于滑模变结构永磁同步电机的直接转矩控制[J]. 沈阳工业大学学报,2008,30(2):143-147.
[9]Jiankun Hu,Christian Bohn,H. R. Wu. Systematic H∞weighting function selection and its application to the realtime control of a vertical take-offaircraft[J]. Control Engineering Practice,2000(8):241-252.
[10]蓝益鹏,杨波,张振兴. 基于线性化解耦的永磁直线伺服系统H∞迃鲁棒控制器的设计[J]. 组合机床与自动化加工技术,2011(3):41-44.
