机器视觉中的光源照明设计
2013-12-17朱宝伟
朱宝伟
(北京信息科技大学仪器科学与光电工程学院,北京 100192)
机器视觉是计算机科学的一个分支,是用机器代替人眼做各种测量和判断。一个典型的机器视觉系统包括图像采集、图像处理、运动控制部分等。图像采集是一个重要的环节,它将被测物的可视化图像和特征转化为能被计算机处理的一系列数据。图像采集部分由光源(S)、光学照明系统(O)、被测物(P)、镜头(L)、摄像机(C)构成[1],采集过程如图1所示。可描述为,在光源提供照明的条件下,被测物的图像经过镜头在摄像机传感器上得到清晰的图像,传感器将图像转换为模拟或数字视频信号,最后通过图像采集卡传输给图像处理部分。
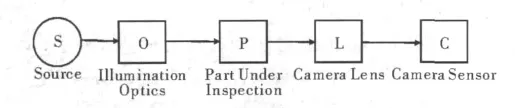
图1 图像采集示意
因此,进行合理的光源照明设计,使被测物中的目标信息与背景信息得到最佳分离,可以大幅降低图像处理算法分割和识别的难度,同时提高系统的定位、测量精度,使系统的可靠性和综合性得到提高。反之,如果光源照明设计不当,会导致在图像处理算法设计和成像系统设计中事倍功半。光源照明设计是决定系统成败的首要因素。光源照明设计要考虑多方面问题,主要是光源的种类和特性、基础照明技术、目标及其背景的光反射和传送特性。
1 光源照明技术
1.1 光源种类和特性
理想的光源应该是明亮、均匀、稳定的。光源种类较多,根据发光器件本身可以分为卤素灯、荧光灯、LED灯、氙灯等,表1列出了几种主要光源的相关特性[1]。
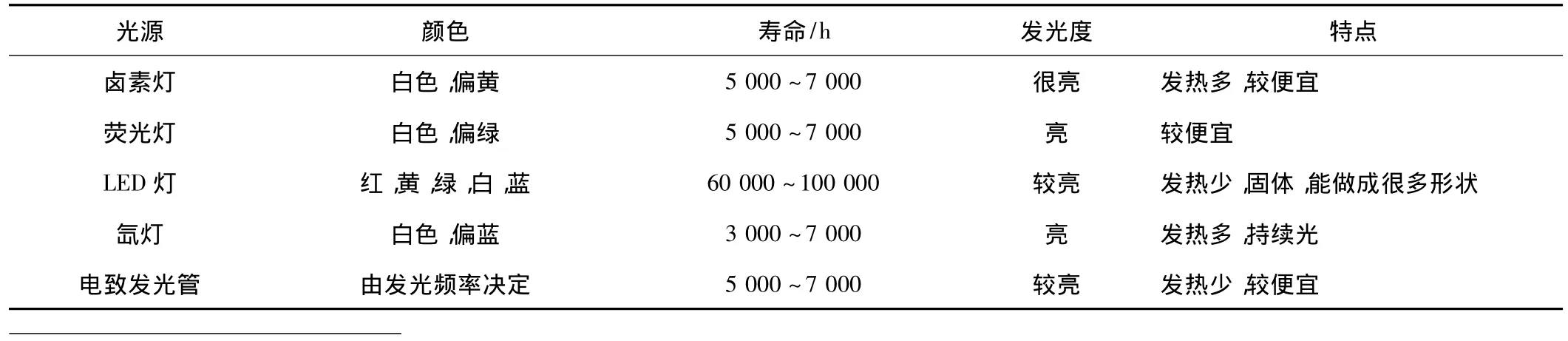
表1 各种光源对比
目前的发展趋势是LED(Light Emitting Diode)发光二极管光源的使用。LED光源的最大优点是发光效率高、响应速度快、体积小、功耗低、发光稳定、寿命长、易于组成不同形状的光源等。光源的特性在光源照明设计中至关重要,主要涉及5个因素:(1)方向。控制照射到物体上的入射光方向是光源照明设计的基本参数,它取决于光源类型和光源相对于物体放置的位置。一般来说,有直射光和漫射光两种基本方式。(2)光谱。光是由单一或多种成分的光谱组成,摄像头传感器获取的光颜色取决于光源所产生的光类型,以及覆盖在光源或摄像机镜头上的光学滤色镜。(3)偏振性。在镜面式的反射光中保留了这种偏振性,利用这种特性,使镜面眩光掠过摄像机镜头,来消除镜面反射光的影响。(4)强度。光照强度会影响摄像头的曝光,光线不足则意味着低对比度,就要加大放大倍数,但可能同时将噪音放大,也可能使镜头的光圈加大,但景深减小。反之,强度过大会浪费能量,并带来散热问题。(5)均匀性。在光源照明中,所有光源随着距离的增大和照射角的偏离,其照射强度将减小。尤其在大面积物体照明时,均匀性是必须要考虑的问题。
1.2 基础照明技术
机器视觉照明设计的任务就是使被测物的特征与背景图像特征之间产生最大的对比度,从而易于特征区分。通常涉及以下照明技术[2-3]:(1)明/暗场照明。暗场照明是相对于物体表面提供低角度照明,使用摄像机拍摄物体,如果镜头处在反射光线的视野内,属于明场照明,否则是暗场照明。因此是明场照明还是暗场照明与摄像机和光源的相对位置有关。(2)背光照明。从物体背面射过来均匀视场的光,背光照明产生了较强的对比度,常用于测量物体的尺寸和定物体的方向,但物体表面特征可能会丢失。(3)漫射照明。常应用于反射性不规律或有复杂角度的物体表面,以减小阴影及镜面反射。(4)同轴照明。对检测强反射的物体特别有帮助,还适合受周围环境产生阴影影响检测或面积不明显的物体。(5)结构光照明。典型的结构光有激光和光纤,结构光可以用于测量相机到光源的距离。
1.3 被测物及其背景的光反射和传送特性
利用被测物及其背景对光的反射和传送特性的差异进行光源照明设计[2],能够强化被测物和背景的对比度[4],即提高图像效果。主要考虑两个特性:(1)反射特性。物体反射光线有两种不同的反射特性:直反射和漫反射。直反射:光线的反射角等于入射角,直反射有时用途很大,有时又可能产生极强的眩光。在大多数情况应避免镜面反射。漫反射:照射到物体上的光从各个方向漫散出去。在大多数实际情况下,漫散光在某个角度范围内形成,并取决于入射光的角度。两种反射的示意效果如图2所示。(2)相减色。反射时,从光谱中去除某些波长的光。如白光照射到红色物体后,红色光谱被反射,而其他成份则被物体吸收。

图2 反射、漫射示意
2 案例中的光源照明设计分析
以“基于机器视觉的滴灌带质量检测”项目为背景,检测目标是黑色软质胶管上滴头的边界、轮廓以及滴头中圆孔的位置,如图4所示。图像处理算法主要采用Canny边缘检测和Hough圆检测等。
2.1 滴灌带的光特性分析
(1)前景(滴头)和背景(滴灌带)均为黑色,决定最好选择光照强度较大、颜色为白色的光源种类。
(2)窄直射光照射滴灌带表面,光以反射为主,漫射为辅。分析方法:根据光学原理,用条形白光直射滴灌带空白区域,镜头置在反射光的视野内,若通过摄像机能够观察到明显的“明视场”,则说明胶管表面对直射光线以直反射为主,漫反射为辅。实验效果如图3所示。
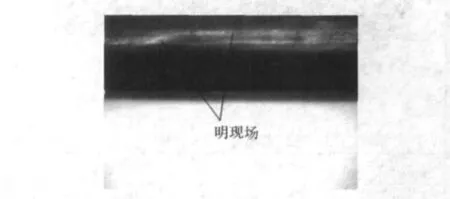
图3 窄条形白光照射滴灌带空白域图
(3)滴头内外空白域与滴头边界光反射特性明显不同。滴灌带表面可以被看做两部分:空白区域和凸起的边界与纹路。根据光的几何原理,采用双侧条形白光明视场照射滴灌带,滴头内外的空白域成像效果相同,而滴头上下边界总有明显暗影,实验效果如图4所示。这是因为从微观上,凸起的边界与纹路实质是不规则的曲面,当光线以特定角度直射时,曲面反射并进入摄像机的光线总是比平面反射进入摄像机的光线少,由MTF=S×O×P×L×C得知,摄像机所观察到的贴片边界和纹络的亮度总是比周围空白区域的亮度小得多。工程实际中正是根据这一成像原理对滴灌带上的滴头进行定位的。

图4 双侧条形白光明视场照射滴灌带图
(4)滴灌带质软、易变形及其在生产线上水平运动等因素,使每次拍摄的滴头图像略有变化,会影响后续图像处理效果。因此,实际中有必要采用有效的机械措施使滴灌带表面尽量平整,并使用发光面积较大的光源。
2.2 实验结果及分析
结合以上光源特性和被测物光特性的分析,采用如下若干可选光源,几种实验对比效果如图5所示,实验分析对比结果如表2所示。
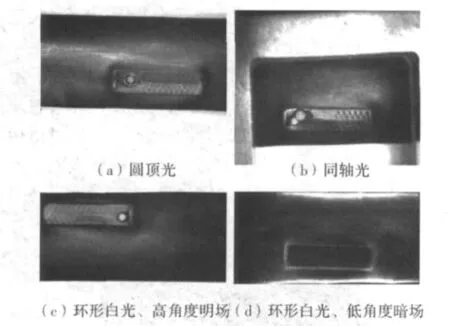
图5 实验对比效果图
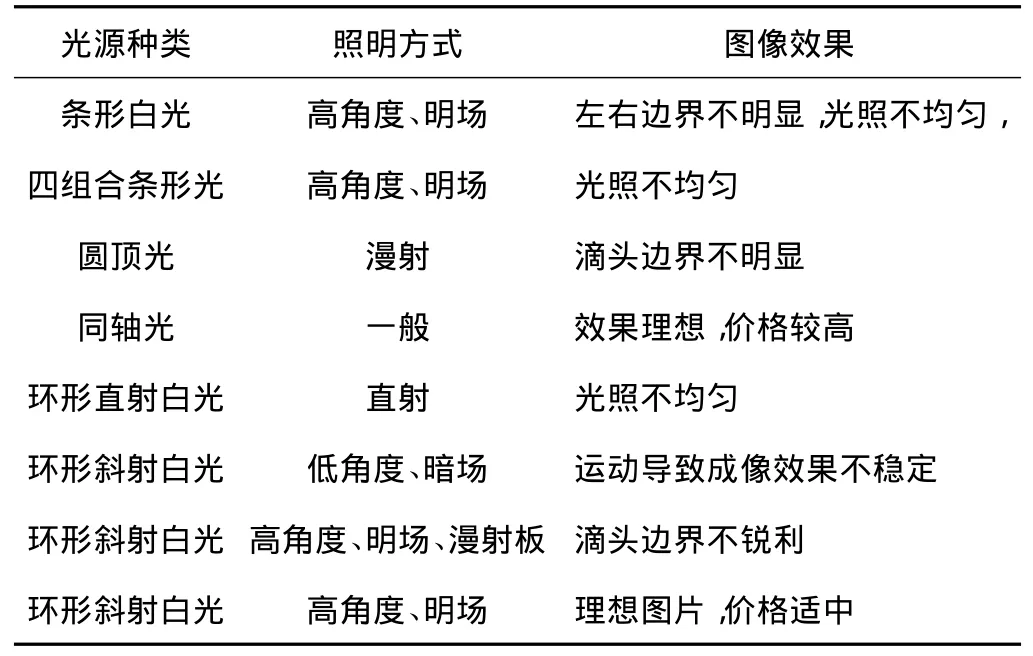
表2 实验分析对比结果
2.3 图像处理后效果
在理论和实验的基础上,并考虑性价比,最终选用环形高亮白光、高角度(与水平方向呈75°夹角)直射式光源,照明方式为明视场、不加漫射板。将采集到的图像,在VC6.0编译环境中,采用OpenCV1.0算法库中的Canny边缘检测、Hough圆检测等算法进行处理。结果表明,滴灌带上的滴头和圆孔检测效果理想,如图6所示。由此说明,该系统中的光源照明设计是合理的。
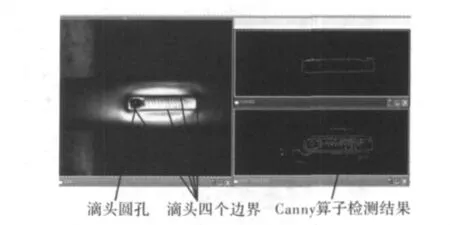
图6 滴灌带检测效果图
3 结束语
综上所述,机器视觉中的光源照明设计没有固定的模式。依据上述理论方法和原则,初步选择合适光源种类和科学的照明方式,至于最终确定的光源照明方式,则要进行反复试验,在实践中进一步修正改进。
[1]STEGER C,ULRICH M,WIEDEMANN C.机器视觉算法与应用[M].杨少荣,译.北京:清华大学出版社,2008.
[2]中科院自动化研究所,北京嘉恒中自图像技术有限公司.机器视觉系统[M].3版 .北京:电子工业出版社,2010.
[3]刘焕军.机器视觉中的图像采集技术[J].计算机与信息技术,2003(1):18-21.
[4]GONZALEZ R C.数字图像处理[M].阮秋琦,译.北京:电子工业出版社,2005.
[5]马艳,张治辉.几种边缘检测算子的比较[J].工矿自动化,2004(1):54-56.
[6]冯伟兴,唐墨,贺波.Visual C++数字图像模式识别技术详解[M].北京:机械工业出版社,2010.
[7]马池德.一种扩展的Laplace边缘检测算子[J].电子科技,2008,21(6):70 -72.
[8]郭峰,王道平,韩溟.基于改进边缘检测算子的图像特征点提取算法[J].电子科技,2011,24(9):9-11.