基于CFAR的SAR目标检测
2013-12-17魏中平
魏中平
(西安电子科技大学电子工程学院,陕西西安 710071)
在现代军事应用中,雷达成像是一重要部分,而对于如何从雷达成像中检测和识别雷达目标如坦克、炮车、飞机、军用卡车等,是雷达成像的重要应用。由于通常雷达识别的目标多为金属制成,其雷达反射回波相对较强,在SAR图像上则表现为具有较大的对比度,因而SAR在机动目标的检测识别方面具有先天优势。
1 基于模型的CFAR检测
CFAR检测[1]是目前较实用的一类目标检测算法。首先它是由事先设定好的虚警概率,通过基于某种分布的杂波统计特性求得检测门限,从而进行检测的一种方法。
如图1所示,pfa为给定的虚警概率;杂波的概率密度函数为p(x);目标的概率密度函数为q(x);则由统计信号和概率论知识可知

其中,T是检测门限;pfa对应阴影部分的面积,即虚警概率。当pfa和p(x)已知时,通过对式(1)求逆,就可求得检测门限T。
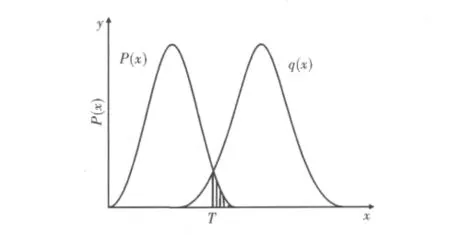
图1 求取门限的示意图
由上可知,在进行CFAR目标检测时,需要确定3个输入因素:虚警概率pfa、CFAR检测器、杂波统计分布模型。杂波背景分布模型是所有CFAR算法的前提,其统计特性需要通过对图像数据进行直方图拟合来获得,如瑞利分布、Gamma分布、对数正态分布、K分布等。CFAR检测器被用来指导进入杂波统计分布参数估计的滑窗内杂波像素序列。
图2给出了CFAR目标检测算法的一般流程。对输入图像,首先进行图像处理,然后根据直方图拟合确定图像的分布与分布参数,设置虚警概率,根据图像的分布得到检测门限,最后得出检测结果。
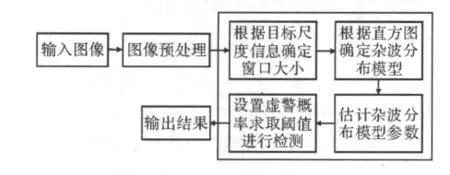
图2 CFAR检测算法流程图
2 各种分布模型的CFAR检测
2.1 基于瑞利分布的CFAR检测
瑞利分布的概率密度函数为[1-3]

其中,σ是杂波的标准差,其分布函数为


设检测阈值为T,给定虚警概率为pfa,则

则可以求出检测阈值T的表达式为

综上所述,当杂波模型为瑞利分布时,根据式(6),就可以求取检测门限。
2.2 基于Gamma分布的CFAR检测
Gamma分布的概率密度函数为

其中,L>0是形状参数;(L/σ)>0是尺度参数。其分布函数的表达式为

由式(8)可得
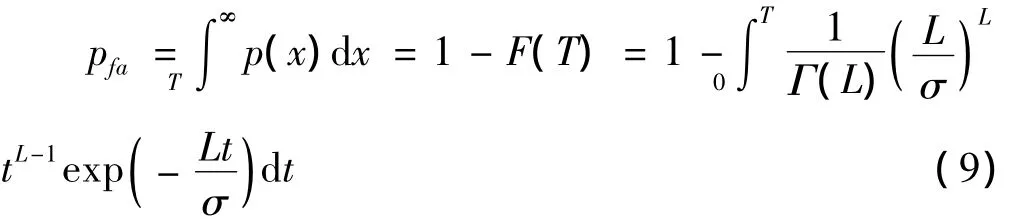
当杂波模型为伽玛分布时,通过式(9)求取检测门限的近似解实现CFAR检测。
2.3 基于对数正态分布的CFAR检测
对数正态分布的概率密度函数为

其中,μ分别是ln(x)的均值和标准差。
令y=ln(x),有x=ey,随机变量y的概率密度函数为

式(11)为高斯分布的概率密度函数,则根据式(11),可以得出检测阈值的表达式为

当杂波模型为对数正态分布时,通过式(12)可按照图2的流程实现CFAR检测。
2.4 基于韦布分布的CFAR检测
韦布尔分布的概率密度函数为

其中,b是尺度参数;c是形状参数。
令y=ln(x),有x=ey,则随机变量y的概率密度分布函数为

此时有-

其中,γ=0.576 4为欧拉常数。

当杂波模型服从韦布尔分布时,首先对图像数据做变换

设检测阈值为T;给定虚警概率为pfa,求得变换后图像数据的检测阈值

由式(18)进一步得到

由式(17)和式(19),按照图2的流程即可实现CFAR检测。
2.5 基于K分布的CFAR检测

K分布的概率密度方程为其中,μ是尺度参数;v是形状参数;n是统计视数;Kv-n(·)是v-n阶的第二类修正的贝赛尔函数。

对式(21)积分,可得随机变量y的分布函数为

由式(23)可以求出检测阈值实现CFAR检测。
2.6 基于Beta-Prime分布的CFAR检测
Beta-Prime分布的概率密度方

其中,参数α是尺度参数;γ是偏差参数。

由式(25)可以得到

由式(26)可以求出检测门限为

根据式(27)求得的检测门限实现CFAR检测。
3 基本CFAR检测器
大多数CFAR算法都是在检测前先验确定图像的杂波背景统计分布。由于实际面临各种各样的地物覆盖类型,这就对描述杂波统计特性的统计分布模型提出了较高的要求。为适应不同的杂波场景,同时简化性能分析,可将杂波背景分为3种典型的场景的进行目标检测[1-2,4]:(1)均匀杂波背景。(2)杂波边缘。(3)多目标。
3.1 CA-CFAR检测器
CA-CFAR是面对均匀杂波区域提出的,它用滑窗内杂波区域中的所有像素估计相应的杂波统计模型的参数。CA-CFAR检测器的一维结构如图3所示。其中,D 是检测单元采样,xi,i=1,2,3,…,2n 是参考单元采样,2n是参考单元数。T'是依赖于虚警概率pfa的标称化因子。
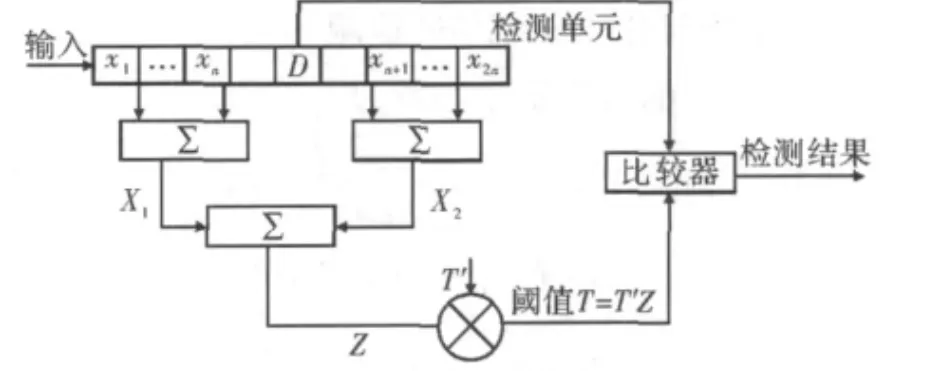
图3 CA-CFAR检测器方框图
对于均匀区域,CA-CFAR是最优的,然而对于多目标和杂波边缘等环境,CA-CFAR检测器的性能将严重衰退。
3.2 GO-CFAR和SO-CFAR检测器
GO-CFAR检测器主要是为对抗杂波边缘而设计,取两个局部估计较大者作为总的杂波功率水平估计。如图4所示。
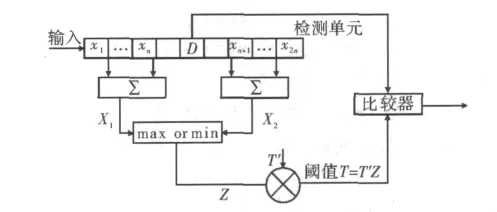
图4 GO-CFAR和SO-CFAR检测器方框图

SO-CFAR检测器缓解了参考滑窗中出现多个空间邻近干扰目标引起的CA-CFAR检测器检测性能下降的问题[5]。当雷达探测特定距离单元的目标时,需要降低邻近干扰目标的影响。SO-CFAR检测器采用X1和X2中较小的作为总的杂波功率水平估计,即有

4 实验结果分析
仿真实验的雷达系统参数设置为:载频为10e9,脉冲重复频率PRF为500,脉宽Tp为3e-6,信号带宽B为 200e6,方位向分辨率 1 m,距离向分辨率为0.75 m,载机运行速度1 000 m/s,飞行高度20 000 m,波束俯视角为70°,对草地上几辆汽车成像仿真。
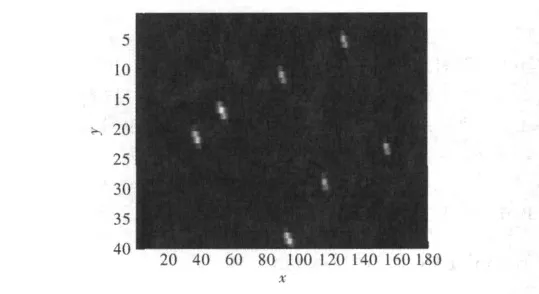
图5 对草地区域成像
首先对场景图像进行各种分布的拟合,图6为拟合曲线。
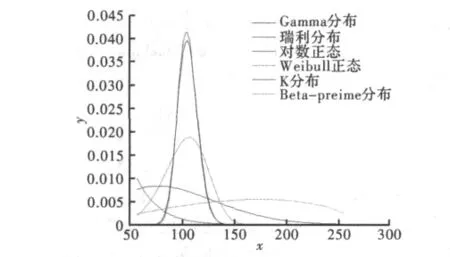
图6 各种分布拟合曲线
通过计算各种分布与图像数据之间的CDF误差平方和,PDF误差平方和来评定各种分布拟合效果的好坏。所得数据如表1所示。

表1 两个准则下各种分布的拟合结果
从表1可以看出,Gamma分布、Log-norm分布对图像数据的拟合程序较好,K分布、Beta分布拟合效果较差。
图7和图8分布为CA-CFAR、SO-CFAR检测结果图。
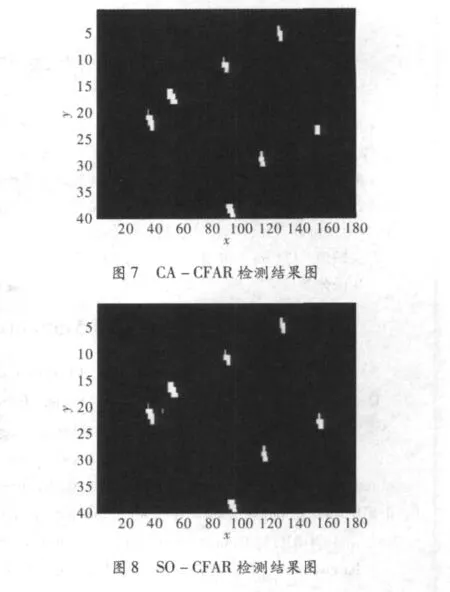
如图7,图8所示,在均匀杂波区域中,3种检测器的结果相当,都可检测出目标,但从整体上看,CACFAR检测性能更好。在实际应用中,可以根据后续处理的不同需求,选择不同的CFAR检测器进行检测,进而得到最优的检测结果。
5 结束语
介绍了基于各种分布的CFAR检测,并对几种常用的检测器进行了说明,最后给出了仿真。基于CFAR的SAR目标检测以算法简单,实现速度快等优点得到了广泛应用,但其同时也存在一些不足,为了使这种算法更适合于雷达成像算法,还需要不断地研究与探索,以适应不断面对各种场景不同的挑战。
[1]匡纲要,高贵,蒋咏梅.合成孔径雷达目标检测理论、算法及应用[M].长沙:国防科技大学出版社,2007.
[2]张琦.基于统计模型的高分辨SAR图像车辆目标检测方法[D].长沙:国防科技大学,2005.
[3]方学立.UWB SAR图像中的目标检测与鉴别[D].长沙:国防科技大学,2005.
[4]张翠.高分辨SAR图像自动目标识别方法研究[D].长沙:国防科技大学,2003.
[5]张军,高贵,周蝶飞,等.SAR图像机动目标检测的两种CFAR算法对比研究[J].信号处理,2008(1):78-82.