厘米—分米波射电日像仪天线阵基线测量*
2013-12-16刘东浩颜毅华
刘东浩,颜毅华,李 沙,王 威
(1. 中国科学院国家天文台,北京 100012; 2. 中国科学院太阳活动重点实验室,北京 100012;3. 中国科学院研究生院,北京 100049)
中国频谱日像仪(Chinese Spectral Radio Heliograph, CSRH)是中国科学院国家天文台研制的国家重大科研装备研制项目,采用综合孔径方法成像的专用于观测太阳的射电望远镜,同时实现以高空间、高时间和高频率分辨率观测太阳爆发活动的动力学性质,探测太阳剧烈活动的起源。填补目前国际上对太阳耀斑能量初始释放区分米波段高分辨射电成像观测的空白,可望在日冕物理研究中取得重要的原创性研究成果[1-2]。日像仪阵列由100面天线接收系统组成[3],分布在10 km2的内蒙古平原上[4]。成像利用不同地理位置的天线相关输出,经过傅里叶变换得到观测源的亮度分布。天线点分布呈对数螺旋线展开[5],整个阵列没有冗余基线,基线间的不同距离代表不同空间频率分量,短基线代表低频分量,长基线代表高频分量。距离精度越高,得到图像的强度和位置信息越准确,为了准确得到太阳爆发的位置和能量特性以获得高质量的太阳图像,基线距离的测量成为系统成像和校准的重要组成部分。
1 综合孔径成像对基线距离精度要求
综合孔径成像是利用不同基线间的相关输出,得到源的亮度分布。
以两天线干涉为例,天线A、B接收来自源S的射频信号,信号与天线基线法向夹角为θ,A、B天线的地理位置不同,B接收到的信号延时τg:
τg=bsinθ/c
(1)
式中,b为基线间距离;c为光速;θ为源入射方向与基线法向间的夹角。综合孔径成像原理要求天线间信号同时同相位相关,因此在接收机A路加入几何延时补偿τg,数字本振加入相位φ,保证信号相关。延时和相位的补偿与基线距离b有关,基线距离精度影响几何补偿的准确性,从而影响图像的动态范围和源的位置等信息。对于日像仪系统延时τg的补偿精度为1 ns,要求基线距离精度300 mm,在条纹旋转过程中,要求相位补偿在同一个波长范围内,不同的频率要求的精度不同,750 mm@400 MHz,150 mm@2 000 MHz,对于更高的频率15 GHz要求为20 mm。综合日像仪图像位置信息对基线位置精度的要求,误差要求为毫米量级[6-8]。
图1 双天线干涉获得信号的相关输出
Fig.1 Signal-correlation output from the dual-antenna interference
2 基线距离测量的方法及坐标系统确定
基线距离即天线三维位置测量可采用大地坐标测量、天文源干涉测量等方法。本文采用大地坐标测量方法对天线的相对位置进行测量,大地坐标测量是利用光学测距的方法确定天线位置坐标,计算基线距离。测量时先定义坐标系,确定方向基准,布设控制网,然后测量天线坐标,对观测数据整网平差得到最后的天线位置。
2.1 测量仪器的选用
采用PENTAX-R202全站仪进行三维坐标测量,测距精度±(2 mm+2 ppm×D),测角精度2″。
2.2 测量坐标系统的确定
综合孔径成像把源假设成二维图像,源位置信息的傅里叶分量用地面上的方向矢量表示,因此地面上的天线坐标只需要知道相对坐标即可,不需要准确的绝对位置。中国频谱日像仪采用相对坐标系统进行太阳观测,成像的坐标系为垂直于源的直角坐标系,计算延时的时候需要把相对坐标进行坐标转换,统一到成像坐标系统内计算,如图2。
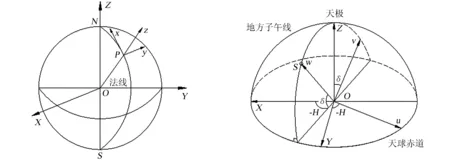
图2 地面坐标系统(x、y、z)和观测坐标系统(u、v、w)
Fig.2 The relation between the ground-coordinate and observation-coordinate systems

(2)
/λ
(3)
τg=w·λ/c
(4)
式中,τg为的几何延时;δ、H为源的赤纬和时间角;Δx、Δy、Δz、ΔX、 ΔY、 ΔZ分别为站心坐标系和地心坐标系下天线间的基线距离;u、v、w为指向观测源的坐标系统。通过站心平面直角坐标系和地心直角坐标系的转换,得到统一的成像坐标系下的延时补偿和相位条纹旋转参数[9]。
3 观测站测量控制网的建立与坐标测量
3.1 相对坐标测量控制网的建立
工程实施过程中控制网的布设方案一般有三角网、边角网、导线网、GPS网等。中国频谱日像仪天线位置测量采用三角网布网方式,天线的位置精度与控制网的布设方案有关。为提高测量精度,在理论布设控制点时遵循等边原则,利用当地的整体平面布置图展绘理论控制测量点,控制点间距为500 m左右,控制点初步设计为35个。
测控网的误差是由测距和测角产生,因此理论估算误差包括:
(5)
式中,mp为点位中误差;ms为测距中误差;mβ为测角中误差。
ms=±2mm+2ppm×500=±3.0mm
(6)
mβ=±2"/ρ×500=±1mmρ常数206 625
(7)
(8)
相对坐标系的方向基准以正北为X轴正方向,符合左手系,天线阵的螺旋线中心为坐标系原点。坐标系的方向基准确定可以采用陀螺仪法,太阳中天时定向方法,精确的方向确定采用天文恒星观测的方法。内蒙古观测站坐标系方向基准采用北极星定向方法,通过查询天文年历计算当地北极星地理经度[10]:

(9)
式中,δ为北极星的赤纬角;φ为测站纬度;t为时角变量。

(10)

(11)
上下半测回合称一测回,角度值为:
(12)
为了提高测量精度,减小度盘分划的影响,每时间段进行4测回观测,起始角度分别为0°、45°、90°、135°。
整个观测过程分6个时间段(表1)进行,以消除视线读数误差,最终确定坐标系的方向基准。

表1 观测时间段内北极星当地地理经度和方位角基准
6个时间段的结果取平均数作为起始边方位角,JC0—JC4的方位角为89°37′14″。
3.2 测控网内控制点测量
实际布设测控点考虑点间通视情况,方便施工和测量的原则,共施工31个测控点(表2)。2011年11月9日~11月15日对所有测控点进行测量,测量时温度均在-10 ℃以下,气压685~700 Mpa,天气干燥,观测条件良好,地表气流扰动很小,大大提高了观测精度。测站点的行进方式为顺时针由近到远,每个测站测量目标数小于6个。

表2 测控点观测限差控制
注:L为测量距离
测量方法按照测量规范严格进行观测,水平角采用全圆测回法,限差满足国家一级网测量要求。水准测量采用三角高程测量,限差满足三等水准要求。处理数据时对超出规定限差的结果,采取了重新测量,重测时在基本测回结束并对结果进行综合分析后进行。重测和基本测回的结果不取中数,每一测回只取一个符合限差的结果,最后对观测得到的数据采用整网平差得到控制点坐标。
3.3 基线间坐标测量结果与分析
基于观测站相对坐标测控网(图3),在2011年11月16日~11月23日对CSRH-I=天线位置进行测量。天线的中心位置的确定应为天线的电轴与地平面的交点。40面天线设计加工精度0.2 mm,保证了天线的中心和地脚螺栓的相对位置,地脚螺栓的安装精度设计为0.5 mm,天线水平面调平精度为15″,测量地脚螺栓确定中心与实际天线中心偏差应小于1 mm。测量点选取天线4个角的地脚螺栓位置,天线位置中心则为4个测量点的重心,个别天线地脚螺栓只能观测到3个,天线的位置为3个测点的外心,如图4。
CSRH-I的40个天线点,共分为9个测站进行测量。测量时遵循临近原则,减小观测距离引起的误差。测量的限差满足测量规范要求,测站内观测目标小于6个,天线位置坐标误差结果如图5。
测量得到的x、y、z的偏差均为全圆观测的闭合偏差,除距离中心远的IA13、IB13、IC13天线外,坐标分量偏差均小于5 mm。
(13)

(14)
式中,Vi为坐标分量分配误差;Si为测量距离;fi为闭合差;V为位置偏差。
最后计算得到基线距离均方根(Root Mean Squ-are, RMS)值小于5 mm。本次测量天线坐标的结果用于日像仪系统天线阵基线矢量初始值设定。精确的天线电轴位置确定将应用天文源干涉法确定。

图3 观测站测量控制点布置
Fig.3 The distribution of the measurement control points
图4 天线中心和测量点关系
Fig.4 The relations between the measurement points and antenna center

图5 天线点坐标测量误差结果
Fig.5 Measurement errors of the antenna coordinates
4 结 论
通过实际测量表明,本文所述的采用多次观测北极星定方位角的方法,使观测站的相对坐标系有准确的方向基准。测控网的观测点布设均匀,减小了边角测量过程中的误差。在测量数据处理的过程中,对坐标结果采取整网平差,使坐标位置精度有所较高,达到了综合孔径成图对基线矢量要求的预期目标。随着长期监测天线的位置坐标,天线的基线矢量将逐步精确。
[1]颜毅华, 张坚, 黄光力. 厘米-分米波高分辨频谱日像仪——项目建议书[R]. 中国科学院国家天文台, 2003.
[2]Yan Yihua, Zhang Jian, Wang Wei, et al. The Chinese spectral radioheliograph-CSRH[J]. Earth Moon Planet, 2009, 104(2): 97-100.
[3]姬国枢, 王威, 刘飞, 等. CSRH-I的天线选择[J]. 天文研究与方法——国家天文台台刊, 2009, 6(3): 209-214.
Ji Guoshu, Wang Wei, Liu Fei, et al. Choices of antennas for the CSRH-I[J]. Astronomical Research & Technology——Publications of National Astronomical Observatories of China, 2009, 6(3): 209-214.
[4]陈志军, 颜毅华, 刘玉英, 等. 关于中国厘米—分米波频谱日像仪(CSRH)选址与无线电环境监测[J]. 天文研究与技术——国家天文台台刊, 2006, 3(2): 168-175.
Chen Zhijun, Yan Yihua, Liu Yuying, et al. Site survey and RFI test for CSRH[J]. Astronomical Research & Technology——Publications of National Astronomical Observatories of China, 2006, 3(2): 168-175.
[5]王威, 颜毅华, 张坚, 等. CSRH阵列设计研究及馈源设计的初步考虑[J]. 天文学研究与技术——国家天文台台刊, 2006, 3(2): 128-134.
Wang Wei, Yan Yihua, Zhang Jian, et al. Array configuration and feed design for CSRH[J]. Astronomical Research & Technology——Publications of National Astronomical Observatories of China, 2006, 3(2): 128-134.
[6]王绶琯, 吴盛殷, 崔振兴, 等. 射电天文方法[M]. 北京: 科学出版社, 1988: 120-137.
[7]魏明智. 密云米波综合孔径系统的误差分析和图像处理[D]. 北京: 北京天文台, 1986: 18-22.
[8]Nakajima H, Nishio M, Enome S, et al. The nobeyama radioheliograph[J]. Proceedings of IEEE, 1994, 82: 705-713.
[9]Thompson A R, J M Moran, G W Swenson. Interferometry and synthesis in radio astronomy[M]. New York: Wiley, 2001: 86-90.
[10]张捍卫, 许厚泽, 王爱生. 天文经纬度和天文方位角测定原理[J]. 测绘科学, 2006, 31(4): 157-160.
Zhang Hanwei, Xu Houze, Wang Aisheng. The basic principle of mensurating astronomical longitude, latitude and azimuth angle[J]. Science of Surveying and Mapping, 2006, 31(4): 157-160.
