陆态网GPS精密定轨方法与精度分析
2013-12-06刘光明唐颖哲秦显平曾安敏
刘光明,唐颖哲,秦显平,曾安敏
(西安测绘研究所,陕西 西安 710054)
陆态网西安数据共享子系统是中国大陆构造环境监测网络数据系统的重要组成部分,于2011-03-30开始试运行。根据陆态网络工程的任务要求,子系统从国家数据中心汇集观测数据,完成数据快速共享、备份,对陆态网络观测数据进行处理,并进行综合分析,及时生产出测绘科研和生产需要的测绘产品。子系统处理的陆态网络观测数据将为科学研究与测绘保障做出重要贡献。
陆态网GPS定轨任务分独立定轨和联网定轨两种。独立定轨是指仅用陆态网布设的基准站观测资料定轨,位于中国大陆上空的卫星星历精度较高,但从全球范围来说星历精度较低。而与IGS联网定轨则使用了全球范围的基准站观测资料,因此,得到的星历精度更高且更均匀。
根据国家发展和改革委员会批复的《中国大陆构造环境监测网络项目初步设计》中的技术指标:产出每天的精密星历,与IGS联网精度优于0.05m。本次数据处理将利用陆态网项目研制的PODAP精密定位定轨数据处理软件,处理从2011-04-10到2011-4-19连 续 运 行10d的 全 球120个IGS核心站观测数据。采用30s数据采样,逐日解算精密星历,验证所得到的精密星历精度是否达到了技术指标。
通过本次数据处理与分析,可以精确得到GPS精密星历,同时也为今后的北斗导航卫星定轨工作积累经验。
1 精密定轨方法
精密定轨数据处理基于惯性系,采用非差处理模式,数据预处理采取与Blewitt(1990)一致的单站数据预处理方法,尽可能探测与修复周跳并剔除异常值。对未修复的周跳引入新的模糊度参数,对未探测的周跳与粗差观测值,在估计模块的质量控制中进行处理。卫星轨道通过其初始时刻的参考状态和力学模型参数描述。轨道积分器采用Runge-Kutta起步,Adams-Moulton多步法预报校正。固体潮汐力、海洋潮汐力、太阳、月亮等第三体行星引力以及相对论效应引起的轨道摄动力模型参照IERS规范。重力场模型可选用EGM96或EIGEN等通用重力场模型。GPS卫星可选择ROCK、JPL、BERN等太阳光压模型。观测模型与IERS 2003标准一致,考虑尽可能多的改正项,包括所有被各IGS数据分析中心运行软件所采用的改正模型。未能精确模型化的误差因素,通过参数估计吸收。同时为了灵活应用于实时和动态定位,采用逐个历元地建立观测方程的方法。参数估计模块采用最小二乘估计器,最小二乘估计器主要应用于事后处理,这有利于节省计算时间和基于观测值残差的数据再编辑。
卫星精密定轨输入数据包括广播星历、GPS观测数据。广播星历提供卫星钟差和轨道的初值,再利用观测数据建立方程,解算卫星轨道的动力学参数和几何参数。将动力学参数积分得到最终的精密轨道。
根据上述精密定轨数据处理的方法,陆态网项目开发了精密定位定轨数据处理软件PODAP。
2 计算步骤
利用PODAP软件精密定轨的数据处理步骤如下:
1)卫星精密定轨的参数设置。默认参数将卫星轨道放开,卫星钟差放开,将一个接收机钟作为参考钟,其余测站的钟差为待估参数。
2)从广播星历提取卫星钟差,生成卫星钟差的初值。
3)广播星历格式转换,生成卫星轨道的初值。
4)轨道由地固系转为惯性系,生成惯性系轨道文件和动力学轨道参数文件。动力学轨道参数文件提供了每颗卫星的初始三维坐标、三维速度以及太阳光压参数。
5)轨道积分是用4)生成的动力学轨道参数文件提供的信息,经积分而得到惯性系轨道文件。这一步生成的惯性系轨道文件与地固系转化的惯性系轨道文件相比,加入了偏导数信息。
6)由轨道积分生成的惯性系轨道文件和从广播星历提取的sp3文件。生成更为准确的动力学轨道参数文件和轨道的拟合残差文件。
7)重复轨道积分、轨道拟合操作,以便于得到较为准确的动力学轨道参数。然后再进行轨道积分操作。
8)参数估计,生成法方程文件、参数文件、残差文件以及动力学轨道文件。
9)残差编辑。
10)参数估计,更新动力学轨道参数文件。
11)对更新后的动力学轨道参数文件进行积分,生成新的惯性系轨道。
12)提取卫星钟差和接收机钟差,并进行残差编辑。
13)重复进行参数估计(更新参数)、轨道积分、残差编辑、提取卫星钟差和接收机钟差。
14)这一步参数估计是为了固定模糊度,可不进行参数更新。
15)固定模糊度。
16)这一步的参数估计需要固定模糊度、参数更新。
17)利用不断更新得到的动力学轨道参数文件,积分得到本次定轨最终的惯性系轨道。
18)将惯性系轨道转化到地固系轨道,生成精密轨道。
19)从残差文件中提取卫星钟差、接收机钟差、对流层参数。
20)为了验证定轨的精度,将生成的精密轨道与IGS公布的该天的精密轨道进行比较。并生成轨道比较文件。
精密定轨误差改正模型见表1[1]。

表1 误差模型

续表1 误差模型
3 计算结果分析
本次定轨分别用120个IGS核心站(见表2)和77个IGS核心站进行比较计算。定轨采用从2011-04-10到2011-04-19连续运行10d的全球IGS核心站数据。这些站是在全球200多个IGS核心站中按照几何分布和数据质量挑选出来的[2]。星历的参考框架由IGS核心站的参考框架决定[3]。

表2 参与定轨的120个IGS核心站
定轨结果与IGS精密星历差值的rms(mm)如表3所示。

表3 定轨结果与IGS精密星历差值的rms
定轨结果与IGS精密星历差值的rms如图1所示。

图1 定轨结果与IGS精密星历差值的rms
可以看出用120个IGS核心站定轨的精度要好于用77个IGS核心站定轨[4]。而定轨精度逐日提高的原因是因为G01号卫星是新发射的卫星,其状态不够稳定,定轨误差较大,进而影响到了定轨结果与IGS精密星历差值的rms。下面分别给出2011-107的G03、G05、G06号卫星与IGS精密星历的差值见图2~4。
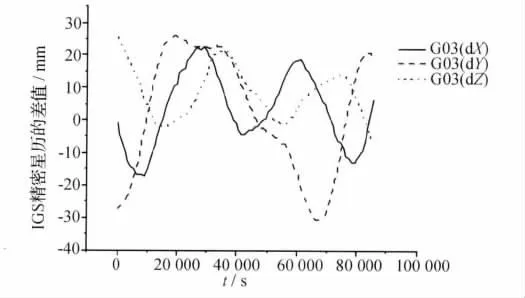
图2 G03星与IGS精密星历的差值

图3 G05星与IGS精密星历的差值
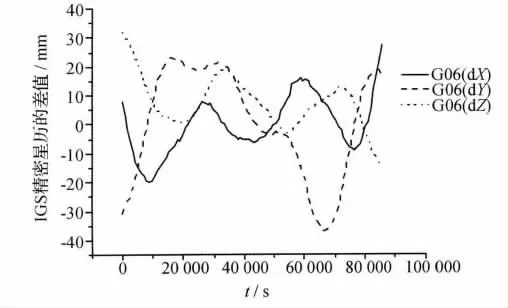
图4 G06星与IGS精密星历的差值
显然,计算结果符合国家发展和改革委员会批复的《中国大陆构造环境监测网络项目初步设计》中的技术指标:产出每天的精密星历,与IGS联网精度优于0.05m。
4 结束语
陆态网络主要由260个GNSS基准站和2000个区域站构成,组成了一个有相当密度、分布合理、覆盖全国的四维观测系统,每天都会产生海量的、实时的、多采样率的观测数据。应用这些GNSS观测数据,西安数据共享子系统可以提供的主要产品有以下9种[5]:
1)台站坐标和速度场,用于建立动态参考框架;
2)满足各类用户需要的GPS卫星的精密星历;
3)GPS卫星钟钟差改正信息,用于地面用户定时和时间比对;
4)地球定向参数;
5)板块运动;
6)电离层模型;
7)对流层天顶延迟变化;
8)高程异常格网,用于GPS水准测量;
9)虚拟参考站网络改正信息,用于高精度快速定位。
这些产品的应用很大程度上提高了我国的测绘保障能力和近地空间环境的监测能力。在一般情况下,精密星历、钟差改正信息、地球定向参数等产品可以通过互联网在IGS的数据分析中心下载。但是在国际局势紧张时,这些产品可能无法下载。因此,必须能够自己独立计算这些产品,进而还要做到在不依赖任何国外数据的情况下计算这些产品。这方面研究工作的意义重大。
[1]常志巧.利用非差观测量确定GPS卫星轨道的方法研究[D].郑州:信息工程大学,2006.
[2]秘金钟.IGS跟踪站与国内跟踪站联合处理的框架点选择研究[J].武汉大学学报:信息科学版,2007,32(8):704-706.
[3]余方达,郝国芳.ITRF框架基准在高精度GPS测量中的统一[J].孝感学院学报,2002,22(6):83-85.
[4]李鹏,沈正康,王敏.IGS精密星历的误差分析[J].大地测量与地球动力学,2006,26(3):40-45.
[5]唐颖哲,姬剑锋,刘光明.陆态网应用于军事大地快速测量的探讨[J].军事测绘,2012(1):29-31.
