大地坐标转换模型及其应用
2013-12-06鲍建宽李永利李秀海
鲍建宽,李永利,李秀海
(1.黑龙江工程学院 测绘工程系,黑龙江 哈尔滨 150050;2.河南省测绘地理信息局 遥感测绘院,河南 郑州 450003)
大地坐标系是以旋转椭球为大地基准建立起来的用于表达地球表面空间位置及其相对关系的数学参照系。它的建立有一个历史发展过程,在不同时期,采用的参考椭球参数及定位方式都不会完全相同,并逐步完善和精化。因此,存在不同大地坐标系统的坐标互相转换问题。目前,我国就有1954北京坐标系、新1954北京坐标系、1980年国家大地坐标系、2000中国大地坐标系,几种坐标系共存。还有GPS系统采用的WGS-84坐标系、GLONASS系统采用的PZ-90坐标系,这些卫星定位测量成果也需要转换为我国的相应坐标系中。此外,在一些地区,由于工程建设的急需(如矿山开发、新城市建设等)而建立的局部独立坐标系,也需要把局部的独立坐标系,转换到相应国家统一的坐标系中。本文就不同的坐标系转换模型的原理与适用条件进行探讨。
1 基于三维直角坐标的坐标转换模型
1.1 布尔莎转换模型
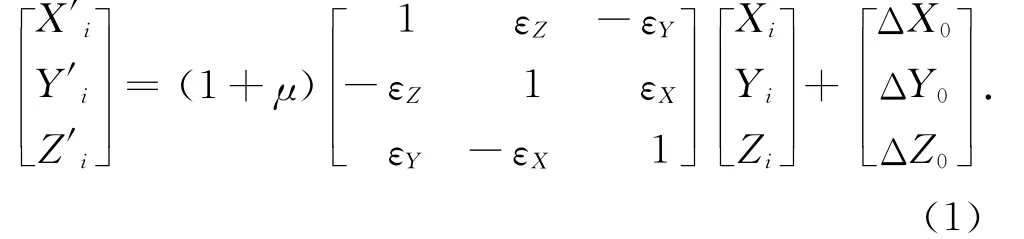
两空间直角坐标系的关系如图1所示,其中坐标系O′-X′Y′Z′是由原坐标系O-XYZ通过绕坐标轴旋转(3个旋转参数分别为εX,εY,εZ)、坐标原点平移(3个平移参数分别为ΔX0,ΔY0,ΔZ0)得到,再顾及两个坐标系尺度不尽一致,从而还有一个尺度变化参数(μ),共计有7个参数。当旋转角ε较小时,相应的布尔莎坐标转换公式为

图1 两个三维直角坐标系的关系
实践中,通过将两个坐标系中公共已知点的坐标代入式(1),解算转换参数,然后再由式(1)把原坐标系内的坐标(Xi,Yi,Zi)转换为新坐标(Xi′,Yi′,Zi′),最后把空间直角坐标(Xi′,Yi′,Zi′)化为大地坐标(Bi′,Li′,Hi′),再化为测绘工程中使用的高斯平面坐标。
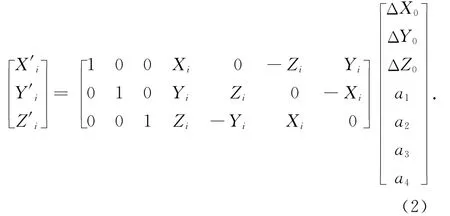
为了可靠地求定两个不同空间直角坐标系的坐标转换公式中的7个转换参数ΔX0、ΔY0、ΔZ0、εX、εY、εZ、μ,则至少需要3个公共点,当具有3个以上的公共点时,可按最小二乘法求得7个参数的最或然值。若令a1=1+μ,a2=a1εX,a3=a1εY,a4=a1εZ,则可将式(1)改写为
若取

由式(2)得误差方程

当有m(m≥3)个公共点时,可分别列出3m个误差方程。根据最小二乘原理VTPV=min的要求,可由误差方程列出法方程,进一步解算出转换参数。
实际应用中应注意的问题:
1)布尔莎模型是舍去高次项后的线性化模型,当旋转角ε≤5″时,对计算转换坐标的影响值最大不过5mm;当旋转角ε≤10″时,对计算转换坐标的影响值最大不过18mm。可见,为减小模型误差,使用该模型时,坐标轴旋转角不宜大于10″。
2)所求得转换参数的精度与公共点坐标的精度及误差方程式系数阵B有关,而误差方程式的系数阵B又取决于公共点的个数和几何分布情况,即转换参数的精度与公共点的个数与几何分布情况有关。因此,为了求得较好的转换参数,应选择一定数量的精度较高且分布较均匀并有较大覆盖面的公共点。
3)为削弱误差较大甚至存在粗差的公共点对解算转换参数的影响,可采用稳健估计的方法进行求解,以确保转换参数计算的可靠性。
4)当利用3个以上的公共点求解转换参数时存在多余观测,由于公共点误差的影响而使得转换的公共点的坐标值与已知值不完全相同,为保持已知点的坐标值固定不变,可采用配置法,将公共点的转换值改正为已知值,对非公共点的转换值进行相应的配置。具体方法是:先计算公共点坐标转换值的改正数vi=已知值i一转换值i(i=1,2,…,m);再计算非公共点转换值的改正数

式中:m为公共点的个数;pji=1/S2ji为权;Sji为非公共点j与公共点i间的距离。
5)当旋转角ε>10″时,式(1)中的旋转矩阵为
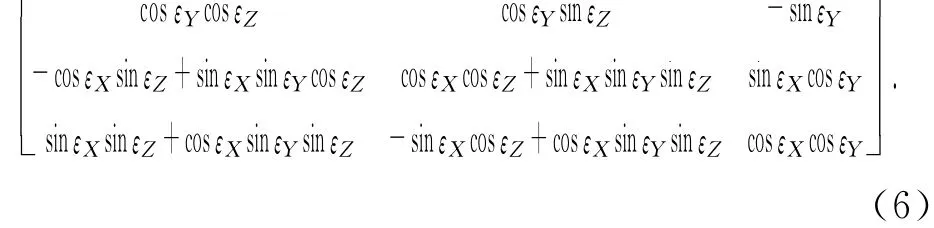
可采用导数的方法、高斯-牛顿法或者无约束优化中的Rosenbrock方法等等,计算转换参数。
1.2 莫罗金斯基转换模型
在布尔莎坐标转换式(1)中,是对坐标点在原坐标系O-XYZ中的位置向量施加旋转和尺度转换,旋转中心就在坐标原点O,尺度变换作用于以原点O为起点的向径OPi。但在大量的实际应用中,往往只是在局部地区进行坐标系的转换,在已有的局部地面控制网中,由于所有的控制点坐标都是由网中某一参考点(例如国家大地控制网中的大地原点、首级工程控制网的起始点)依次推算得出的。因此,就应将旋转和尺度变换的作用范围限制在控制网区域以内,宜以该参考点PK作为变换中心(见图2),与此相应的即为莫洛金斯基坐标转换模型。

图2 地方坐标系与目标坐标系的关系
在莫洛金斯基坐标转换模型中,(ΔX0,ΔY0,ΔZ0)为坐标系O-XYZ的原点O在坐标系O′-X′Y′Z′中位置向量,亦即两坐标系间的3个平移参数;(XK,YK,ZK)则为参考点PK在O-XYZ坐标系中的位置参数;(εX,εY,εZ)是以参考点PK为旋转中心的旋转参数;μ为参考点PK到网中任一点Pi间向径的尺度变化参数。转换参数的解算方法同布尔莎转换模型。
实际应用中应注意的问题:
1)莫洛金斯基坐标转换模型更适用于参心坐标系与地心坐标系之间的转换,以及地方坐标系与国家坐标系之间的转换。
2)在进行参心坐标系与地心坐标系之间的转换时,由于参心大地坐标系都是用传统测量技术建立的,并非严格意义上的三维坐标系,难以实现与三维地心坐标系的严格转换,求得的参数就不够可靠。又因为参心大地坐标系在参考椭球定位定向时难以满足理想条件,坐标系本身的偏差,也存在着地面网定位定向的系统误差,且由于地壳形变等多种原因使地面网点的坐标值随时间延续而发生变化。因此,地面网参心坐标系的系统误差,使得数值较小的3个旋转角难以准确求定,旋转角参数的估值在数值上往往与其本身的中误差相接近。这样,有时就不考虑旋转和尺度变换,而仅取用3个平移参数。
1.3 武测转换模型
在莫洛金斯基转换模型中,若把旋转中心由参考点PK变为坐标原点O,亦即旋转参数(εX,εY,εZ)仍为坐标系O-XYZ通过以O为中心绕坐标轴旋转的角度,则得到武测转换模型的转换公式为
1.4 范士转换模型
如图3所示,3个旋转角(ωX,ωY,ωZ)是以控制网参考点PK的站心地平坐标系的3个坐标轴PKx,PKy,PKz为旋转轴,这点是与莫洛金斯基转换模型所不同的;而(ΔX0,ΔY0,ΔZ0)为坐标系O-XYZ原点O在坐标系O′-X′Y′Z′中的位置向量,亦即两坐标系间的3个平移参数;μ为参考点PK到网中任一点Pi间向径的尺度变化参数。这构成了范士转换模型的7个坐标转换参数。
据(εX,εY,εZ)与(ωX,ωY,ωZ)的关系,则
把式(9)代入式(7)既得范士转换模型的转换公式。
1.5 广义大地坐标微分公式
对于不同大地坐标系的换算,除了包含3个平移参数、3个旋转参数和1个尺度变化参数外,还包括2个地球椭球元素变化参数。不同大地坐标系的换算公式为
式(10)通常称为广义大地坐标微分公式或广义变换椭球微分公式。
实际应用中应注意的问题:
1)根据m(m>3)个以上公共点的两套大地坐标值,由式(10)参照式(3)和式(4)可以列出3m个误差方程,采用最小二乘原理可求出其中的转换参数。
2)在通常情况下,两个不同大地坐标系的da,dα是已知的。对于同一国家或地区,尽管大地坐标系因参考椭球元素和定位定向改变,但坐标轴总设定是平行的。对于同一大地网,长度变化参数μ总为零,对于不同大地网,μ相差也不会太大。因此,在一般情况下可以略去εX,εY,εZ,μ诸参数,而只解求ΔX0、ΔY0、ΔZ03个椭球定位变动量,即坐标系原点的平移量。
2 基于平面直角坐标的坐标转换模型
2.1 相似变换模型
如图4所示,旧坐标与新坐标的关系为

图4 两个平面直角坐标系的关系

若取c=kcosθ,d=ksinθ,则

此即为相似转换模型。各参数的几何意义:k为尺度参数;θ为旋转参数;a,b为平移参数。
实际应用中应注意的问题:
1)当测区内具有新旧两种坐标系的m(m>2)个公共点时,即可利用最小二乘法求定新旧坐标系的转换参数。误差方程的列立参照式(3)和式(4)。
2)与三维坐标转换一样,由于公共点的坐标存在误差,求得的转换参数将受其影响,公共点坐标误差对转换参数的影响与点位的几何分布及点数的多少有关,因而为了较好地求得转换参数,应选择一定数量的精度较高且分布较均匀并有较大覆盖面的公共点。同样,可采用稳健估计的方法进行求解,以此削弱误差较大甚至存在粗差的公共点对解算转换参数的影响。
3)相似转换仅适用于投影方式、椭球元素、椭球定位均相同的情形。其优点是转换参数的意义较为明确,计算简便,其常数能保证转换过程的正形性。不足之处在于,它只适用于小范围内、局部坐标系间的坐标转换,且没有考虑两坐标系间的局部变形和误差积累,转换精度较低。
4)转换公式的转换元素a,b,θ,k中,a,b,θ是常量,而k由于存在边长高斯改正,则有所变动。坐标转换时,在一定范围内,可以将测区投影高程面及高斯平面各边的长度比k视为一个常量,其原则是在一个测区内用一个k值进行转换,其长度变形值不超过25cm/km。由于长度变形与线段距X轴的距离(即端点Y坐标的平均值ym)、线段长度及该地的平均地球曲率半径有关,据此可计算出相似转换模型的适用区域大小,结果列于表1。
2.2 正形转换模型
依据正形投影的柯西—黎曼条件,可推导出实现两坐标系间坐标转换的正形转换模型为

实际应用中应注意的问题:
1)在式(12)中仅取一次项,则与式(11)表示的相似变换模型一样。与相似变换相比,正形变换法比相似变换法精度要高,它适用于变换区域相当大的情形。
2)同样,正形转换也要求两坐标系的投影方式相同,椭球元素椭球定位也相同。因此,它只能用于各局部坐标系间满足以上条件的变换。并且它只能用于坐标转换,不能解决投影变形。即它也把投影变形由原坐标系转换到新坐标系中。
3)在没有多余公共已知点的条件下解出各变换参数pi,qi,经变换后在公共点上新、旧网互相重合。这样有可能使旧网变形过大,特别是旧网中远离公共点的点位可能纠正过甚,致使结果不好。
4)实用上,模型公式(12)中变换参数仅保留到p3,q3即可。通常需要4个以上的公共点,列出误差方程,利用最小二乘法解算各变换参数pi,qi(i=0,1,2,3)。
5)当两平面直角坐标系属于同一椭球的高斯平面直角坐标系,但两者存在若起始数据或投影轴子午线的差异时,例如城市、矿区的新旧控制网,或它们与国家大地网之间往往存在这种情况,需要先进行高斯投影解算,把旧坐标系归算相同的投影面上。然后再进行两网的正形转换计算。
6)当两坐标系属不同的参考椭球参数和定位时,需要先进行坐标基准变换。例如,1954年北京坐标系的大地点和1980年国家大地坐标系之间的转换,先把公共点平面坐标由高斯投影公式化为大地坐标;然后依据大地坐标微分公式(10)解算两空间直角坐标系的平移参数;再把平移参数和椭球变化参数代入大地坐标微分公式(10)计算非公共点的80坐标系的大地坐标;第四步,把非公共点的80坐标系的大地坐标化为高斯平面坐标;最后,在80坐标系内,进行两网的正形转换计算,完成坐标转换计算工作。
2.3 多项式转换模型
设新坐标系中点的坐标为(X′,Y′),旧坐标系中的坐标为(X,Y),则多项式转换的表达式为

若取转换区域中心附近的一个点的坐标为(X0,Y0),式(13)可以表示为
实际应用中应注意的问题:
1)按式(13)若取二次多项式模型,计算到待定系数到a5和b5至少需要6个公共点坐标,当公共点多于6个时,利用最小二乘法解算待定系数。
2)多项式拟合法是一种采用平面坐标位置作为因变量的二维坐标转换方法。当公共点分布较均匀且点间距离适当的情况下,所建立数学模型能够达到较好转换精度。
3)多项式拟合法的最大特点是以转换点的高斯平面坐标为因变量,不需知道目标椭球似大地水准面差距ζ,就能够实现不同坐标系间的二维坐标转换,具有坐标转换精度高、成果可靠、便于应用等优点,适合任意坐标系间平面坐标转换计算。
4)如果需要转换的区域较大,公共点较多,可以选择更高阶数的多项式进行转换。
3 结束语
在多种测量坐标系统并存共用的今天,坐标转换计算工作是测量计算的重要内容之一。需注意以下问题:
1)在选用坐标转换模型时,要综合考虑待转换的两个坐标系的基本信息、待转区域的地理位置(距离央子午线的距离)、区域的面积、公共点的多少与分布等情况,来选择适宜的坐标转换模型。
2)对公共点的选择,精度上要择优选择控制网的起算点及高精度控制点;其个数要多于模型要求的最少个数;公共点位置要分布均匀,包围整个测区,在测区内部选定若干个均匀分布的公共点对坐标转换精度进行检核。
3)对于不同坐标系之间的坐标转换,平面四参数转换模型原理简单,数值稳定可靠,但只适合于较小区域的坐标转换。布尔莎七参数转换模型为三维模型,在空间直角坐标系中,两坐标系之间存在严密的转换模型,由于理论比较严密,不存在模型误差和投影变形误差,因而它适合于任何区域的坐标转换。
4)对于各局部坐标系间的转换,当投影方式不同时,可采用多项式转换模型。当投影方式相同时,可采用平面四参数转换模型、布尔莎七参数转换模型、三维七参数转换模型;如果变换区域范围较大,精度要求较高,可采用正形转换。
5)由局部坐标系向地心坐标系的转换时,多项式转换模型是一种切实可行的方法。
[1]王佩贤.大地测量学[M].北京:煤炭工业出版社,2007.
[2]刘大杰.实用测量数据处理方法[M].北京:测绘出版社,2000.
[3]施一民.现代大地控制测量[M].北京:测绘出版社,2003.
[4]边少锋,柴洪粥,金际航.大地坐标系与大地基准[M].北京:煤炭工业出版社,2005
[5]郑航行,杨力,沈志明.利用Rosenbrock法优化坐标转换[J].测绘科学,2008,33(02):25-27.
[6]杨元喜,徐天河.不同坐标系综合转换法[J].武汉大学学报:信息科学版,2001,26(6):509-513.
[7]王仲锋,杨凤宝.空间直角坐标转换大地坐标的直接解法[J].测绘工程,2010,19(2):7-9.
[8]张宪柱,张书毕,姜波,等.两种平面坐标系换算的改进方法[J].测绘工程,2010,19(2):62-64.
[9]郑红晓,雷伟伟.国家坐标系统与城市坐标系统转换方法的比较[J].铁道勘察,2008,34(5):23-25.