自适应双阈值的运动目标检测算法
2013-12-03李丹丹
张 震,李丹丹
(郑州大学 电气工程学院,河南 郑州450001)
0 引言
近年来,运动目标检测一直是视频图像序列分析中的重点和难点.视频监控中,运动目标的检测需要先对获得的视频序列进行图像分割.但是由于交通场景不是静止不变的,如光照、浮云等天气状况的变化以及摇曳的树枝经常会使背景发生改变,造成图像分割不准确,这就需要不断地更新背景,以适应不断变化的场景.
传统的背景初始化和背景更新方法不能很好地解决光照、阴影等环境变化带来的影响.文献[1]采用基于加权平均的Surendra背景更新算法,能够较好地识别运动车辆,但是需要的经验值较多,适用范围有限.Kima K等[2]采用 Codebook算法进行图像前景和背景的分割,算法简单,速度快,但需要实时压缩编码背景像素.Kornprobst P.等[3]采用偏微分等式法进行背景重构.而像素灰度归类的背景重构算法[4]在文献[3]的假设前提上,根据帧差法对该像素灰度进行归类,选择频率最高的灰度值作为该点背景.JIN Cheng-jun等[5]采用统计直方图的方法提取和更新背景,降低了光照和阴影变化对检测结果的影响,但是在彩色空间域中处理图像,运算量大.HE Zhi-wei等[6]采用高斯分布进行背景建模,可解决背景缓慢变化和突变的情况,但是需要提取一帧没有运动目标和光照变化的背景.WANG Feng等[7]采用混合高斯模型(GMM),利用最大期望值算法估计模型参数并进行更新,降低了运算复杂性,但是在光照变化和噪声较多的环境下运算量大,适应性不佳.笔者给出的自适应双阈值运动掩膜算法,可很好地适应不同环境变化,且运算速度较快,能够满足实时视频检测的需要,准确度高、鲁棒性好.
1 经典单阈值算法缺陷
经典图像分割算法是采用单阈值背景差法[8],其背景更新仅采用加权平均法,算法较简单,但是要求每帧图像中所有像素都更新,耗时长.单阈值运动掩膜算法[9]仅对当前图像中被判定为背景的区域进行更新,而对前景区域不更新,耗时少.根据实时更新的背景再采用单阈值背景差法能够简单快速地分割出运动物体.
背景差法是利用含有运动目标的当前图像减去当前背景得到差分图像.数学表达式为

式中:CI(x,y)和CB(x,y)分别为当前图像、当前背景在(x,y)处的像素灰度值;DI(x,y)为其差分图像.
差分图像二值化数学表达式为

其中,BM(x,y)为二值目标掩码,用于区分前景和背景.BM(x,y)=1 标记为前景,BM(x,y)=0 标记为背景,T为分割阈值.
无论背景差法还是运动掩膜算法,采用单阈值进行图像分割时,阈值的确定都比较困难.当所选阈值较大,会把前景目标错判为背景,造成图像前景分割不完整,出现漏检;而所选阈值较小,会把大部分背景当做前景,使前景区域扩大,易出现错检现象.这两种算法均采用统计灰度直方图的方法设定和更新阈值.交通场景中背景灰度出现的频次高,前景灰度出现的频次低,会出现两个峰值,以其间的峰谷为所选阈值.但是在不同天气条件下,当前景与背景灰度相近时,峰谷位置不易确定,阈值更新会不准确,会严重影响图像分割效果,导致系统鲁棒性差.
2 算法
经典背景差法通常以人工获取一幅没有运动目标的图像作为初始背景.但在工程实践中,交通流不断发生,且场景中随着时间推移光照不断发生变化,又受阴影等噪声影响,很难获得一帧没有运动目标且稳定的背景,同时也违背自动原则.笔者结合动态双阈值和单阈值运动掩膜算法[9]的优点,选用改进的双阈值背景更新算法,自适应更新背景,为目标检测奠定基础.
2.1 背景更新算法流程
笔者利用多帧平均法初始化背景模型,可滤除噪声影响,解决人工提取背景的困难.背景更新模块流程图如图1所示.双阈值运动掩膜背景更新算法的实现步骤如下:
(1)获取前N帧图像I0,I1,…,IN-1(N≥10),取其平均值作为初始背景 CB0,即 CB0=

(4)根据二值目标掩膜计算双阈值运动掩膜,表达式为:MMi=OMi&(~ OMi-1).
(2)设定初始高、低阈值TH0,TL0.

图1 双阈值运动掩膜背景更新模块流程图Fig.1 Flow chart of the double thresholds motion mask background updatemodu le
(5)以双阈值运动掩膜MMi作为门限阈值判定前景背景点,进行背景更新.当MMi=0时,采用加权平均法更新背景,即CBi=αCBi-1+(1-α)CBi.当 MMi=1时,不更新背景,即 CBi=CBi-1.总之,仅对前一帧是前景且当前帧为背景的点进行更新.α的大小影响更新速度的快慢,一般取 α为0.95.
(6)当i=i+1,采用函数链接型神经网络更新双阈值并转入第(3)步循环.
笔者给出的双阈值运动掩膜背景更新算法可以很好地提取和更新背景,提高系统运行速度,且不受初始条件限制.
2.2 双阈值的自动更新算法
由于阈值T与输入的每帧图像的平均灰度值Iave存在非线性关系,即T=f(Iave).可用幂级数的形式表示如下:


图2 函数链接型神经网络模型Fig.2 Functional chain neural network model
采用函数链接型神经网络[10]可以逼近非线性函数.针对高阈值TH,式(1)中,m为多项式阶数,m越大逼近非线性函数精度越高,所得更新阈值越准确,但待确定系数也越多,训练时间也越长,影响更新速度.实验证明,m=4时既可满足精度要求,又能保证更新速度.W0,W1,…,Wm为多项式系数,也为神经网络的加权系数.确定了m值,加权系数可以通过样本训练确定.算法如下:
用x表示自变量Iave,用y表示自动更新阈值T,则非线性函数可表示为

神经网络输出:

误差:

权值调整:

3 双阈值差分算法检测运动目标
交通场景受天气状况影响比较大,在光照强烈时,路面反光使路面背景和白色车辆等浅色车辆灰度值相近;在阴天光照较弱时,路面和黑、灰色等深色车辆的灰度值接近.单阈值方法很可能会使这些灰度与背景相近的车辆遗失或检测成碎片,而碎片太小会难以和噪声分离,导致车辆检测或统计不准确.2.2节中以每帧图像的平均灰度值作为输入自适应更新高、低两个阈值,能很好地适应光照变化,并根据2.1节中更新的背景做差分可消除阴影,准确检测到深色和浅色两类运动目标.具体算法如下:

采用低阈值分割所得前景会包含大量阴影及噪声,而采用高阈值会使分割的前景不完整、目标区域内孔洞多.笔者利用数学形态学方法膨胀高阈值分割所得差分图像DH,消除孔洞;再与低阈值分割所得差分图像DL取并,既能消除空洞,又保证了分割目标的完整性,然后采用腐蚀方法,可消除低阈值导致的目标偏大问题.
4 实验结果分析
4.1 检测效果
为验证笔者所给出的双阈值运动掩膜算法的可行性和有效性,选取一段384×288的交通监控视频进行验证.在配置为Intel Pentium双核1.86G CPU、内存为1GB的HP台式机上做实验.采用VC++6.0软件编程.现以采集的第80帧图像为例,对图像进行处理并加以说明,如图3所示.
图3中(a)为原始图像,(b)为低阈值检测的目标,(c)为高阈值检测的目标.实验结果表明,低阈值检测到的目标偏大,还带有较多阴影;高阈值检测到的目标不完整,孔洞较多.结合单阈值法检测结果的特点,本文算法得到了优势互补的效果,如图4(c)所示,既去除了较多阴影,又消除了孔洞,目标完整且边缘平滑.图4中(a)帧差法所得目标有“拖影”现象;图(b)得到的目标较好.

图3 单阈值法检测结果Fig.3 Detecting results of single threshold method
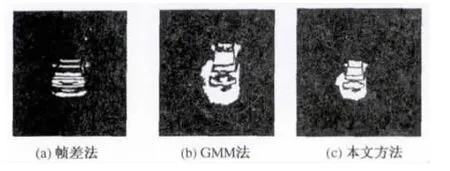
图4 各方法检测结果Fig.4 Detecting results of other methods
4.2 分析对比
笔者主要从不同光照条件下的识别率、运行时间、帧频几方面来对比.分别在天气晴朗和阴暗时采集同一时段同一路口的两段交通视频,检测结果如表1所示.
由表1的对比可知:单阈值法和GMM方法受光照条件影响较大,而帧差法和本文算法受其影响较小.但相对而言,本文算法识别率较好.
表2为针对同一环境条件下帧频不同的视频流测试.由结果可知,GMM算法虽然识别效果也很好,但耗时长,不利于实时系统.综上表明,笔者给出的自适应双阈值运动掩膜算法能够更好地识别出运动车辆,适应性好,鲁棒性高,更适合实时智能交通系统.

表1 天气晴朗和天气阴暗时各算法的识别率Tab.1 Recognition rate of allmethods on sunny day and on cloudy day

表2 各算法不同帧频下识别率和运行时间Tab.2 Recognition rate in different frame frequency and run time
5 结论
采用双阈值运动掩膜算法检测运动目标,在工程实践中可实时更新背景、自动更新阈值;并结合双阈值背景差法和数学形态学检测运动目标,既能快速消除阴影,得到完整的目标,又能够适应光照变化的影响.实验结果已证明该算法具有很高的准确性和鲁棒性.但在去除阴影方面,对阴影位置的准确检测与消除,有待进一步提高.
[1] YANG Zhi-qi.A new algorithm of background image extraction and update in the vehicle detection system[C]//2011 International Conference on Multimedia Technology(ICMT), Guangzhou, China:IEEE press,2011:5238-5241.
[2] KIMA K,CHALIDABHONGEB T H,HARWOODA D,et al.Real-time foreground-background segmentation using codebook model[J].Real-Time Imaging,2005,3(11):172-185.
[3] KORNPROBST P,DERICHE R,AUBERT G.Image sequence analysis via partial difference equations[J].Journal of Mathematical and Vision,1999,11(1):5-26.
[4] HOU Zhi-qiang,HAN Chong-zhao.A background reconstruction algorithm based on pixel intensity classification in remote video surveillance system[C]//Seventh International Conference on Information Fusion.Mountain View,CA,USA:International Society of Information Fusion,2004:754-759.
[5] JIN Cheng-jun,CHANG Gui-ran,CHENG Wei,et al.Background extraction and updatemethod based on histogram in YCbCr color space[C]//IEEE Conference on E-Business and E-Government(ICEE),Shanghai,China:ICEE press 2011:1-4.
[6] HE Zhi-wei,LIU Ji-lin,LIPei-hong.New method of background update for video-based vehicle detection[C]//IEEE Conference on Intelligent Transportation Systems.Washington,WA,USA:IEEE press,2004:580-584.
[7] WANG Feng,DAI Shu-guang.Adaptive background update based on mixture models of Gaussian[C]//IEEE Conference on Information and Automation(ICIA).Zhuhai,China:[s.n],2009:336-339.
[8] 徐晓夏,陈泉林.智能交通监控系统中的自适应背景更新算法研究[J].上海大学学报:自然科学版,2002,9(5):420-422.
[9] GUPTE S,MASOUD O,MARIN R F K,et al.Detection and classification of vehicle[J].IEEE Transactions on Intelligent Transportation System,2002,3(1):37-47.
[10]任朝栋,张全法,李焕,等.快速消除车辆阴影的多阈值图像分割法[J].应用光学,2010,31(6):961-964.
