四足步行机器人稳定性步态规划
2013-12-02
(杭州电子科技大学计算机应用技术研究所,浙江 杭州310018)
0 引 言
足式步行是自然界许多动物所采用的一种步行方式,其具有较高的灵活性[1]。步行机器人的步态研究就是依据自然界足式步行生物的步行姿态而展开的。其在复杂、崎岖的地表环境下有较好的稳定性、机动性和地形适应性,能够用于救灾探险,地表探测,战场侦察等场合[2]。本文以四足步行机器人为对象,进行了机体平台腿部结构分析并推导腿部关节转动角度的计算公式,讨论了稳定步态的主要影响因素,并提出了从起步到稳定行走的步态调整方式,规划了一个循环内的稳定步态。机器人步态的研究是实现步行机器人能否稳定步行的基础,任何步行机器人无论是四足或是多足机器人,要实现其步行过程都离不开步态规划这一关键环节,其对机器人的研究具有非常重要的理论和实际意义。
1 四足步行机器人的结构组成
本文研究的四足步行机器人是基于仿生学原理进行设计。针对典型四足爬行类动物,自主设计其结构简图如图1所示,体宽为140.0mm,体长为200.0mm,每条腿有3个关节,分别由3个舵机控制,分别对应关节1,关节2,关节3,其间由三连杆连接。
2 四足步行机器人运动学分析
在四足步行机器人的机身上建立以几何中心O点为原点的参考坐标系{O},以第i条腿与机体的连接点Ai为原点建立基坐标{Ai},如图2所示,其中OB =80.00mm,BAi=50.00mm。初始站立状态时,连杆1 呈水平状态,连杆2 相对连杆1 转动30°,连杆3 相对连杆2 转动60°,即连杆3与地面垂直,OC0为机体的高度。
应用Denavit-Hartenberg表示法建立关节参数表如表1所示:
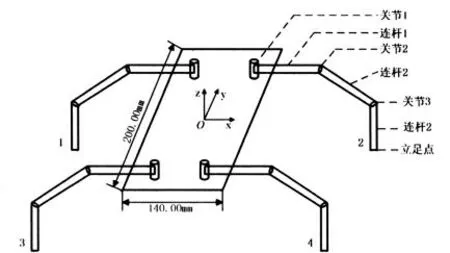
图1 四足步行机器人的结构简图

图2 四足步行机器人腿部关节坐标系

表1 腿i的D-H模型参数表
根据D-H的4×4的齐次变换矩阵,得出各关节的空间变化矩阵,再联立各关节矩阵得到坐标系3在{Ai}中的变换矩阵:


3 步态稳定性原理
对四足步行机器人进行稳定性分析时,首先设定假设条件:其重心不随运动发生变化,近似集中于其躯体的几何中心。
3.1 步态相关的名词术语
稳定裕度:步行机器人的重心在足支撑平面上的垂直投影点到各立足点构成的多边形各边的最短距离,通常不用垂直距离,而是用位移方向的距离S表示,它是衡量步行机器人在行走时的静态稳定程度[3]。步距λ:4条腿作一次循环,机器人机体相对地面移动的位移。腿跨距E:单腿从抬起到落地过程中,足端相对机器人机体的位移。单腿步距A:单腿从抬起到落地过程中,机器人机体相对地面的位移。重心调整距H∶4条腿支撑时,机器人机体相对地面的一次位移,一次循环中可有多次调整。负荷因数β:单腿在地面支撑时间和4条腿作一次循环时间的比值。周期T:指4条腿完成一次循环运动的时间。
3.2 步态的选择
四足步行机器人在直线行走时机体首先要保证静态稳定,即S≥0。然后机体相对地面作向前运动,重心跟着向前移动,4条腿轮流抬跨,不断改变立足点的位置,构成新的稳定三角形,来保证静态稳定。机体与腿的运动必须在任何时刻保证协调一致,步态就是腿抬跨顺序与足端相对机体位移的关系。根据排列组合并去除循环重复,步态顺序有6种,如表2所示,其中稳定界限K[4]与稳定裕度S较大,表明其稳定性较好,由此选择1 423 进行研究。

表2 四足步行机器人6种步态稳定界限及稳定裕度
3.3 步态的主要影响参数
四足步行机器人进行步态行走时,主要影响稳定性的参数有周期T、步距λ、负荷因数β、行走速度等因素,其中选择重要的T、λ、β 进行分析。
(1)周期T。在一定的稳定裕度下,周期越短,行走速度越快,步态就越好。但在实际运动规划中,周期越小,舵机转动时间越短,其转动力矩增大,不利于实现稳定步态。
(2)步距λ。依据λ=A+E,可认为A 移动距离越短越好,而单腿跨距E 受机械结构限制,必须小于腿能够伸展的最大长度。
(3)负载因子β。由负载因子的定义,可以列出其表达式:

式中,Ts表示单腿支撑时间,k为一个循环内重心调整的次数,四足步行机器人k 一般取1,2,4[5]。步态1 423的K为β-0.75,即β≥0.75,随着β的增大,机体稳定性增强,重心调整时间增加。但在相同稳定裕度下,调整时间越长,其步态越差,同时能耗也越大[6]。
4 四足步行机器人稳定步态规划
4.1 运动参数与关节变量的计算
根据前面对四足步行机器人的分析,设计稳定步态的各参数:取步距λ=120.0mm,E=100.0mm <2OB,k=2,T=12s。可计算得到A=λ-E =20.0mm,H=(E-3A)/k =20.0mm,S =H/2 =10.0mm,根据式3可得β =5/6 >3/4。那么,可以确定初始站立状态如图3所示,再根据式2可以计算出各立足黑点对应的各关节转动值,通过控制舵机转动到相应的角度所示:-3.8°,θ3=59.7°,θ2=30.0°;θ1=3.8°,θ3=59.7°,θ2=30.0°;θ1=11.1°,θ3=57.5°,θ2=30.0°;θ1=18.2°,θ3=52.8°,θ2=30.4°。

图3 初始站立状态
4.2 起步调整
由初始状态到稳定步行存在一个起步调整的过程。起步调整过程中的运动时序如图4所示,起步调整时间为0.4T。依次摆动足4向后移动3S,足2向后移动S,足3向前移动3S,足1向前移动5S。

图4 初始到稳定步行的时序
4.3 步态图
步态图是描述四足步行机器人在一个周期循环的过程中,各腿相续抬跨的顺序和各足端相对机体的位移图。针对前面计算参数和关节变量,四足步行机器人的步态如图5所示:

图5 稳定步态图
图5(b)、(e)是四足同时支撑,机体向前移动A的位移确保下一次抬跨机体重心在稳定三角形区域内,且保证稳定裕度的值始终S≥10.0mm。整个过程满足稳定性要求。
5 结束语
本文结合自主设计的四足步行机器人进行实验研究,建立了单腿关节坐标系以及腿部运动学方程,分析了稳定步态和各参数取值的影响,设计了稳定步态的各参数并计算了各关节舵机的转动量,给出了一个周期内四足步行机器人稳定行走时足端相对机体的步态图。经过实验表明了步态参数正确、直观,舵机能够转到相应的角度且转动平稳,四足步行机器人能够达到很好的稳定性。所规划的步态对步行机器人应用的领域具有重要的意义。
[1]Howarad A M,Parker L T.A hierarchical strategy for learning of robot walking strategies in natural terrain environment[C].Montreal:IEEE International Conference on Systems,Manand Cybernetics,2007:2 336-2 341.
[2]王吉岱,卢坤媛,徐淑芳.四足步行机器人研究现状及展望[J].制造业自动化,2008,31(2):1-2.
[3]徐轶群,万隆君.四足步行机器人稳定性步态分析[J].制造业自动化,2001,23(8):5-7.
[4]刘西侠,吴振华,金毅,等.四足机动平台的静步态规划研究[J].装甲兵工程学院学报,2011,25(4):34-39.
[5]王鹏飞.四足机器人稳定行走规划及控制技术研究[D].哈尔滨:哈尔滨工业大学,2007.
[6]张海涛,孟庆国.步行机器人水平静稳定行走能量分析[J].天津科技大学学报,2001,21(2):13-15.
