基于车辆自动识别技术的动态OD 矩阵估计新方法
2013-12-02孙剑,冯羽
孙 剑,冯 羽
(同济大学 道路与交通工程教育部重点实验室,上海201804)
车辆出行OD(origin-destination)是交通系统规划、设计及运行管理的核心基础信息.传统的OD 矩阵获取方法是进行大规模的车辆出行抽样调查,为了避开出行调查技术困难、经费巨大及耗时长的问题,基于交通检测信息的OD 估计理论一直是研究的热点.自1978 年Van Zuylen 和Willumsen首次运用极大熵理论通过检测路段交通量来“反推”OD矩阵以来,OD 估计研究已经有30余年的历史.估计方法包括最小二乘法、状态空间模型以及信息论方法等[1-3].
随着信息检测技术的迅速发展,交通信息采集技术已经迅速从以环形线圈为代表的“断面型”检测技术向“广域”的车辆自动识别技术(automatic vehicle identification,AVI)转变.AVI技术包括视频牌照自动识别技术、基于高精度GPS的车辆定位技术、路侧信标与车辆通信识别技术等,其核心是可检测车辆ID(车牌号)、通过时间以及车辆位置等信息.伴随着AVI技术的应用,国内外学者对AVI环境下的OD 估计进行了探索,国外Dixon[4]等通过扩展卡尔曼滤波模型,同时将交通量和AVI之间的行程时间作为观测变量对车辆OD 进行了估计;Zhou[5]在利用非线性最小二乘估计中考虑了行程时间影响;Barcelo[6]等通过车载蓝牙信息预测行程时间,并将之引入卡尔曼滤波进行OD 估计.国内Deng[7]等通过整合3S信息资源进行动态OD 矩阵的研究;陈大山[8]等将神经网络嵌入到卡尔曼滤波中进行动态OD 矩阵研究.然而上述方法仍然存在如下问题和挑战:
(1)对于AVI环境下的动态OD 估计,目前的方法仍然是通过对经典OD 估计模型进行改进,加入AVI检测时间信息来提高OD 估计精度.事实上,AVI检测的路径信息对OD 估计的精度至关重要.
(2)OD 估计不仅与网络拓扑、路段流量相关,还与先验信息的精度有密切的关系,以往的研究通常都假设已获得可靠的先验信息来推算OD,未对不同质量的先验信息环境下估计算法的实用性和可靠性进行精细化分析.
(3)在实际路网中,受投资预算、安装条件、AVI识别率等多方面的影响,AVI检测精度和覆盖率都有一定限制.如何在有限精度/覆盖的检测条件下获得较高精度的动态OD 矩阵是一个巨大的挑战.
针对上述问题,本文在文献[9]静态OD 估计的基础上,引入AVI检测的部分路径信息、动态行程时间信息以及检测器可测性(measurability)判据,通过改进的粒子滤波算法,从微观的视角对路网中任意车辆的起迄点以及进入路网的时间进行动态估计,然后将路段AVI检测流量作为辅助参数校正OD 估计结果,进而获得较高精度的动态OD 矩阵.
1 动态OD估计流程
文献[9]静态OD 估计的方法是以AVI检测的流量和路径信息为基础,基于贝叶斯估计理论修正更新路段-路径流量关系,确定可能路径以及OD.若要进行动态的OD 估计,还需要解决车辆进入路网的时间判断、不同时段的动态行程时间以及车辆路径估计问题.本文的方法是以车辆路径信息、车辆到达时间信息为基础,基于检测器可测性判断依据,通过迭代更新贝叶斯算法来缩小车辆缺失路径搜索范围,修正可选路径的后验概率;同时在行程时间快速预测方程基础上确定任意车辆的路网进入时间以及所有缺失路径的行驶时间;最后通过蒙特卡洛随机仿真模拟任意车辆的路径选择来实现动态的OD估计.其算法的数学基础是粒子滤波思想,即通过寻找一组在状态空间传播的随机样本对概率密度函数进行近似,以样本均值代替积分运算,从而获得状态最小方差分布的过程[10].
动态OD 估计算法描述为如图1 所示流程,共包含8步骤.

图1 动态OD 估计流程图Fig.1 Flow chart of dynamic OD estimation
Step1根据AVI采集得到的路径完整程度,将车辆路径信息数据分成以下3类:第一类是路径全知型;第二类是路径半知型,包括已知完整路径中的两个或两个以上断面,以及两个断面之间的完整路径;第三类是路径单知型,只知道其出行路径中的某一个断面.在考虑AVI检测精度的基础上,根据估计时段内AVI检测的实际捕获的车辆数,将先验信息放样至与实际捕获车辆数相同.
Step2将第h时段中获得的第一类信息(路径全知型信息)与AVI先验信息ψ进行联动递减,即将先验信息中的OD 对流量减去已知完全路径的OD信息,获得新的先验信息ψ′.当先验信息中的OD 对流量小于已知的实际路径流量时,先验信息中的OD对流量保持为最小流量1.
Step3将检测获得的AVI信息中的到达时间依据AVI检测器布设进行分类划分,获得任意两个相邻的AVI检测器之间的行程时间,并依据AVI间行程时间构建路段-路径行程时间快速预测方程.
Step4提取第h时段中AVI信息中的第二类路径信息(路径半知型信息),根据检测器的可测性判断依据和车辆的行程时间估算,用贝叶斯估计对任意车辆的可能缺失路径进行重判断,重新确定缺失路径选择范围并修正新选择路径后验选择概率;最后通过蒙特卡罗随机仿真对单个车辆进行缺失路径的估计,进而获得完整路径估计数据.
Step5将第二类信息的路径估计结果进行保存并与AVI先验信息ψ′进行联动递减获得新的AVI先验信息ψ″,并基于第三类信息(路径单知型信息)的捕获量以及识别误差,再次进行先验扩样信息,更新得到先验信息ψ‴.
Step6第三类路径信息的处理方法与第二类路径信息的处理相似,并将此路径信息进行保存.
Step7 将三类信息进行整理累加获得第h时段估计的初始修复车辆OD 矩阵.
Step8将初始修复车辆OD 矩阵与AVI检测器获得的路段流量进行反向校正验算,在路段流量的允许误差范围内修正初始修复OD 对流量.获得最终第h时段路径OD 矩阵,并以此作为h+1 时段OD 先验矩阵.
1.1 贝叶斯估计算法
贝叶斯估计模型可以在基于不完全情报条件下,对部分未知的状态利用主观概率估计,然后利用贝叶斯公式对发生概率进行修正,最后利用期望值和修正概率做出最优决策.其数学模型可以描述成如下形式:
式中:Dh表示在第h时段所获得的实测数据;Hi表示第i条路径;P(Hi/Dh)表示在第h时 段,基于AVI数据D与先验概率后第i条路径的后验选择概率表示在第h时段,选择第i条路径的先验概率;表示在第h时段,基于AVI数据可测性判据对第i条路径的修正概率;∂表示在贝叶斯估计中存在的噪声.
其中模型的分母为常量,因此模型可以简化为

1.1.1 行程时间快速判断方程
动态的交通出行OD 矩阵估计中,车辆行程时间用于描述车辆进入路网和离开路网的时刻.因此行程时间估计精度将对提高动态OD 矩阵估计至关重要.由于AVI检测的是AVI点对的行程时间,需要将其转化为路段(路径中的两个节点)行程时间.AVI点对与路段行程时间转化数学方程可描述为

式中:tn1-n2表示任意两个AVI之间的行程时间;表示第e辆车经过任意相邻AVI检测器的时间;LAVI1-AVI2表示任意两个相邻AVI检测器之间的距离;Ln1-n2表示两个AVI检测器之间所在的两个节点之间的距离;β表示行程时间计算中的随机误差.
利用所有车辆的平均行程时间预测任一车辆的路段行程时间并不合理,原因在于每个车辆的驾驶行为差异很大,造成车辆之间的行程时间有较大差别.因此为了更加合理地描述车辆的行程时间,本文将估计时段内,所有通过任意两个AVI检测器的车辆按行程时间区间进行分类,并分别计算各类行程时间的概率,以P(1),P(2),…,P(n)表示;再通过随机模拟的方法,确定任一车辆的行程时间,即可满足车辆个性化的行程时间计算.其数学模型描述如下:

如图2所示,假设编号为A1,A2,A3,…,Aj的车辆分别经过检测器AVI1和检测器AVI2,并且已知这些车辆到达两点的时间 集合根据公式分别计算任意已知车辆经过两个AVI的行程时间,并依据车辆总数获得车辆平均行程时间Tave;将所有车辆的行程时间与平均行程时间进行比较并进行区间分类,得 到 区 间 分 类 集 合),其中表示第r组区间中有辆车,并通过公式(4)计算各组区间的选择概率当存在编号为A 的车辆经过检测器AVI1时,可以通过随机仿真判断其到达AVI2的行程时间,而该数据是检测器可测性判据的重要依据.同时通过公式(3)和公式(5)可以计算车辆A 在两个AVI或两个AVI间任意两个节点的行程时间,进而判断车辆是否是在本时段内进入路网,这部分信息是动态OD 估计中的一个重要参数.

图2 AVI点对以及路段节点对平均行程时间计算示意图Fig.2 Schematic of calculate average travel time between AVIs and nodes
1.1.2 检测器可测性判据
在现实路网中,AVI检测存在如下两个事实:①由于AVI检测器存在车辆捕获误差和识别误差,因此其检测精度有限;②由于资金和安装条件等约束,AVI 无法全覆盖.据此提出AVI 可测性(measurability)概念,定义为:基于AVI检测信息数据缺失的特点和已检测车辆的动态行程时间信息,分析判断车辆经过某一路径的可能性.
如图2所示,假设估计时段内,已知编号为A 的车辆通过AVI系统获得其部分路径信息,即车辆A通过检测器AVI1和AVI2,并且已知经过两检测点的到达时刻分别为T1和T2,通过式(3)计算得到AVI2至AVI3的行程时间为T2-3,并已知车辆A 的缺失 路 径 概 率 集 合 为ξ(P(O1D3),P(O1D4),P(O1D5),P(O1D6)),根据AVI可测性定义,当车辆A 有充足时间到达下一个路段检测器AVI3,但车辆A 的路径信息却不包含检测器AVI3时,存在两种情况:①车辆A 通过AVI3,但由于检测误差而没有被记录;②车辆没有经过布设AVI3的路段,直接到达D3.基于以上两种情况,分别提出判别模型如下:
如果(T2+T2-3<h+Δt)则

式中:Δt表示估计时段长度;P′(OmDn)表示修正后的缺失路径的车辆选择概率;P(OmDn)表示初始的缺失路径的车辆选择概率;ε表示AVI设施的检测误差,包含捕获误差与识别误差.
AVI检测器可测性判别依据对于车辆路径的上游路段是同样适用的,将检测器可测性判据根据行驶路径的下游缺失路径和上游缺失路径分别描述为如下两种形式:
式(7),(8)中:P(u)表示下游行驶方向中第u组缺失路径的先验信息;θ(u)表示上游行驶方向中第u组缺失路径的先验信息;εju表示在第u组缺失路径下游行驶方向,基于j组满足可测条件的AVI检测器的可测性修正概率;εku表示在第u组缺失路径上游行驶方向,基于k组满足可测条件的AVI检测器的可测性修正概率;Ti表示在车辆i最后一次被检测到的时刻;T′i表示在车辆i第一次被检测到的时刻;h表示估计时段的开始时刻;P′(u)表示下游路径中第u组路径的后验概率;θ′(u)表示上游路径中第u组路径的先验概率.
1.1.3 贝叶斯路径概率模型
将先验信息矩阵,以及1.1.1节的行程时间快速预测方程,1.1.2节的检测器可测性判据作为先验路径选择概率,贝叶斯车辆路径概率算法模型更新如下:
式中:Pu(Hu/Dh)′表示在第h时段第u条缺失路径修正后的路径选择概率;Pu(Hu)h表示在第h时段第u条缺失路径的先验选择概率;αu表示路径选择概率的随机误差.
1.2 蒙特卡罗仿真路径选择过程
蒙特卡罗方法由于能够真实地模拟实际物理过程,逼近真实的物理结果,因此通过蒙特卡罗方法对AVI检测的样本粒子模拟基于概率的空间状态选择.
对任意被AVI检测器所检测的车辆,其所有的缺失路径修正概率集合为ξ(P1,P2,…,Pu),并且根据行程时间快速预测方程计算的各缺失路径起点的出发时间集合为ζ(T1,T2,…,Tu),设定

式中:Wi表示路径后验概率的累积频率;Pi表示第i组路径后验概率.
仍以图2为例,通过不断产生随机数的方法,模拟任一车辆可能的选择路径.若随机数S小于Wi大于Wi-1,则说明车辆的路径为第i条缺失路径.完成路径选择后,相应工作是车辆进入路网时间的确定,根据驾驶员的最后路径选择,判断:

式中:Vh表示第h时段内实际进入路网的车辆集合.
1.3 路段流量修正
AVI检测器同样可以获得路段流量数据,路段流量与OD 对之间存在如下关系:

式中:Fi表示路段i上的路段流量;fmn表示从起点m到终点n的OD 量;pimn表示从起点m到终点n的OD 量中选择路径i的概率.
通过贝叶斯估计和蒙特卡洛随机仿真,可以计算所有被检测车辆的后验路径选择概率,并使车辆作为检测样本粒子拟合后验路径选择概率密度获得后验OD 矩阵.本文采用动态的随机规划方法,当路段-路径流量相对误差小于5%,可视为收敛.其数学过程描述如下:

式中:α1表示检测误差下限;α2表示检测误差上限;fimn表示通过第i条路径的后验矩阵中的起点为m,终点为n的OD 对流量.
2 案例分析
2.1 研究区域及实验平台
2008年始,上海市开始在快速路系统规划布置视频牌照自动检测设备,本案例以上海市南北高架快速路作为研究对象.在VISSIM 仿真模型中设置“虚拟检测器”模拟实际视频的检测参数及检测精度,利用虚拟的检测数据进行OD 估计并和VISSIM中的“真实”OD 做比较,由此来解决OD 估计精度的验证问题[11].
2.2 动态OD 估计结果分析
2.2.1 OD 估计精度分析
基于虚拟的“AVI”检测数据,得到不同估计时段OD 估计相对误差值,如图3,4所示.当AVI覆盖率为60%,先验OD 精度为40%时,其相对误差仅为21.8%;而当AVI覆盖率为80%,先验精度为80%时,相对误差精度提高为17.3%.另外当覆盖率为50%的情况下,动态OD 估计的精度出现较大的波动,但其平均的动态OD 估计相对误差为30.11%;当AVI覆盖率为50%,先验精度60%时,相对平均误差为28.87%.文献[8]通过对简化快速路的研究,在仅考虑较高AVI覆盖率和高精度的先验信息的前提下,其动态OD 估计相对误差为21.04%,与本文实际路网动态OD 估计精度相当[8].但当AVI覆盖率为45%,OD 估计精度迅速衰减,其平均相对误差降为41.9%,已经较难满足实际需求.主要原因是当覆盖率较低时,主要的OD 对流量已经不能被检测到.
2.2.2 对先验信息的敏感性分析
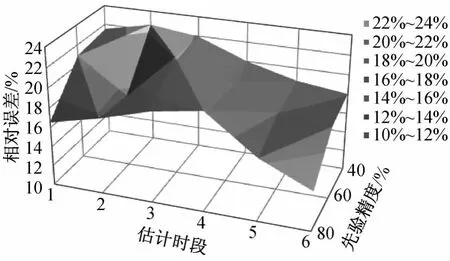
图3 80%覆盖率下相对误差Fig.3 Relative error in 80%coverage
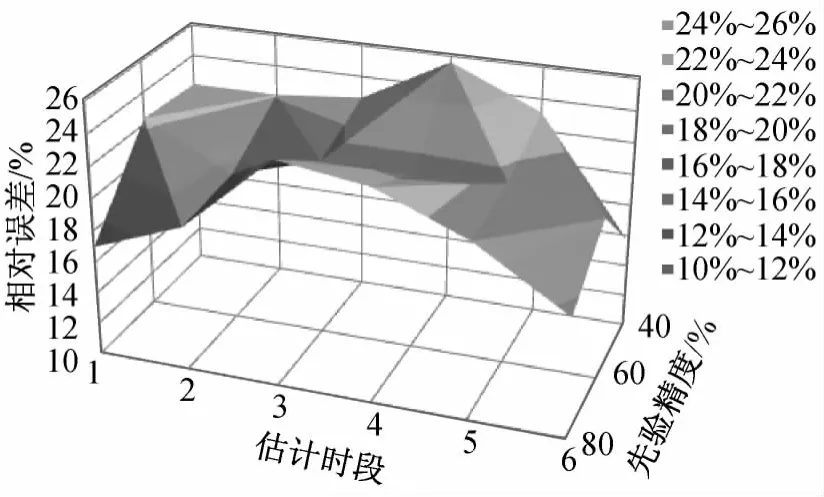
图4 60%覆盖率下相对误差Fig.4 Relative error in 60%coverage
以往的研究对先验信息有较大的依赖,而本文引入的检测器可测性方法则对先验信息有较强的鲁棒性.以较低的AVI覆盖率(60%)为例,在不同的先验信息精度下,OD 估计精度变化如图5所示.从图5可以看出,在任意先验信息精度下,本文方法均能较好地估算动态OD.

图5 60%覆盖率下相对误差变化Fig.5 Relative error changes in 60%coverage
3 结 论
本文针对当前视频牌照自动识别系统在我国逐步应用的现实需求,提出了基于AVI信息的动态OD 估计新方法,并以上海市南北高架快速路网模型对方法进行检验.主要结论如下:
(1)本方法突破了传统方法中仅依赖路段流量和行程时间作为OD 估计的主要信息的局限,基于粒子滤波的思想提出了基于路径信息、检测器可测性、路径行程时间的OD 估计方法.上海市南北高架的案例分析表明,当AVI覆盖率为50%,先验精度为60%时,平均相对误差为28.87%,仍能基本满足动态交通管理的需求.
(2)针对AVI检测误差和覆盖度所提出的检测器可测性判据,较好地缓解了对先验信息的依赖,可以在随机的先验信息下推算出较高精度的OD.
(3)此方法对大规模开放式地面道路网络同样具备适用性.通过AVI信息的采集以及交通分配算法得到路段-路径流量数据库,应用本文所提出的方法,能迅速缩小任意车辆路径选择范围,提高车辆真实路径的选择概率,并可通过AVI检测的流量数据对OD 矩阵再次进行修正,实现快速准确的对大规模开放式路网OD 进行估计.
(4)本文提出的方法提供了一种从微观的车辆路径修复角度进行动态OD 估计的方法.在进一步的研究中,将重点考虑如何结合本方法优化AVI设施的布局方案,在规划层面,指导更科学地布设,从源头上为运营管理中获取高精度动态OD 提供支撑.
[1] 常云涛.考虑交通流行驶时间的高速公路动态OD 矩阵估计模型[J].同济大学学报:自然科学版,2009,37(9):1184.CHANG Yuntao.Dynamic OD matrix estimation model of freeway with consideration of travel time[J].Journal of Tongji University:Natural Science,2009,37(9):1184.
[2] Tsekeris T, Stathopoulos A. Real-time dynamic origindestination matrix adjustment with simulated and actual link flows in urban networks[J].Transportation Research Record 1857,2003:117.
[3] Bierlaire M,Crittin F.An efficient algorithm for real-time estimation and prediction of dynamic OD tables[J].Operation Research.2004,52(1):116.
[4] Dixon P M,Rilett R L.Population origin destination estimation using automatic vehicle identification and volume data [J].Journal of Transportation Engineering,2005,131(2):75.
[5] Zhou X S, Mahmassani H S. Dynamic origin-destination demand estimation using automatic vehicle identification data[J].IEEE Transactions on Intelligent Transportation Systems,2006,17(1):105.
[6] BarcelóJ,Montero L,Marqués L,et al.Carmona,travel time forecasting and dynamic OD estimation in freeways based on bluetooth traffic monitoring[J].Transportation Research Record 2175,2010:19.
[7] DENG Bin,HU Jianming,DAI Zhiguang,et al.Using 3S technology to estimate OD matrix[C]//Proceedings of the 12th International IEEE Conferenceon Intelligent Transportation Systems.St.Louis:IEEE,2009:836-842.
[8] CHEN Dashan,SUN Jian,LI Keping.Dynamic OD estimation under automated vehicle identification environment[J].Key Engineering Materials,2011,46(7):835.
[9] 孙剑,冯羽.车辆自动识别环境下的OD 估计新方法研究[J].同济大学学报:自然科学版,2011,39(12):1800.SUN Jian,FENG Yu.A new method of OD estimation based on automatic vehicle identification Data[J].Journal of Tongji University:Natural Science,2011,39(12):1800.
[10] 胡士强,敬忠良.粒子滤波算法综述[J].控制与决策,2005,20(4):361.HU Shiqiang,JING Zhongliang.Overview of particle filter algorithm[J].Control and Decision,2005,20(4):361.
[11] 孙剑,李克平,魏静,等.基于视频牌照识别的动态交通OD估计仿真优化[J].公路交通科技,2009,26(8):130.SUN Jian,LI Keping, WEI Jing,et al.Dynamic OD estimation simulation optimization based on video license plate recognition[J].Journal of Highway and Transportation Research and Development.2009,26(8):130.