MEH(小汽轮机电液控制)改造设计
2013-11-30杨传龙郭红玲
杨传龙 郭红玲
(1.日照钢铁有限公司,山东 日照 276806;2.日照市工业学校,山东 日照 276800)
MEH是指在锅炉给水泵中采用汽动给水泵的自动调节系统,由于用小汽轮机作为原动机去拖动给水泵,实现电厂的节能降耗,许多电厂正在进行MEH改造。但目前所在热电厂的小机只能现场手动、半自动控制,因此要设计一改造方案来实现远程自动控制功能:1)远程手动控制;2)远程自动控制;3)远方自动/手动打闸;4)超速遮断保护(ETS)。
1 建模
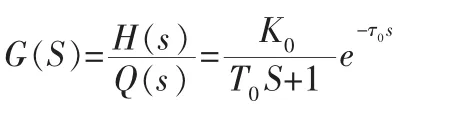
T0=R2C:过程时间常数,R2=K0:过程放大系数,τ0为过程的纯时滞。阶跃响应和模拟图,如图1。

图1
电动机的转速与Q1的大小成正相关,因此转速的调整与液位的变化也为带有时滞的正相关。
2 串行策略
由数学模型建立相应的串行控制策略,如下图2。

图2
控制效果分析:由于采用了副回路,改善了被控过程的动态特性,副回路调节不必追求太高的超调量,所以采用了PI调节,副回路采用较大比例系数时,工作频率高,对进入副回路的干扰有很强的克服能力,对负荷或操作条件的强烈变化有较强的适应能力。
3 PID整定
PID整定多采用工程衰减曲线法(4:1),分两步整定:
1>在工况稳定运行条件下,主副调节器具置于纯比例作用,主调比例度δ1置于100%,用4:1衰减曲线法整定副调节器参数得:δ2S=32%,T2S=15S
2>将副调节P置于32%,T置于15S,用相同的整定方法,将主调节器比例由大到小逐渐调节,求得:δ1S=50%,T1S=7min
3>根据上述参数,运用4:1衰减曲线法查表得:
主调节器 (n):P:δ1=0.8δ1S=40%,I:T1=0.3 T1S=2.1min,D:TD=0.1 T1S=0.7min
副调节器(Q):P:δ2=1.2δ2S=38.4%,I:T2=0.5T2S=7.5s
4 电气自动化远程实现
测控量与传感器变送器的选择:被测量有转速、流量、液位、温度、压力补偿等,主控制为阀门开度。
本厂选用常用磁电转速传感器(转速信号变送为4~20mA)和LWGQ型涡轮流量传感器,开环手动现场调节器,步进电动机控制阀门开度调节汽动给水泵,新华DCS控制系统有DPU冗余和模入端子冗余,工程师站有XDPS软件(可形象设计图案控制组态)。
因此可采用原有现场电气接线与DCS控制系统互联,完成改造设计。
现场控制接线图3:

图3
电气接线图
<1>调速器部分

图4
<2>危急遮断

图5
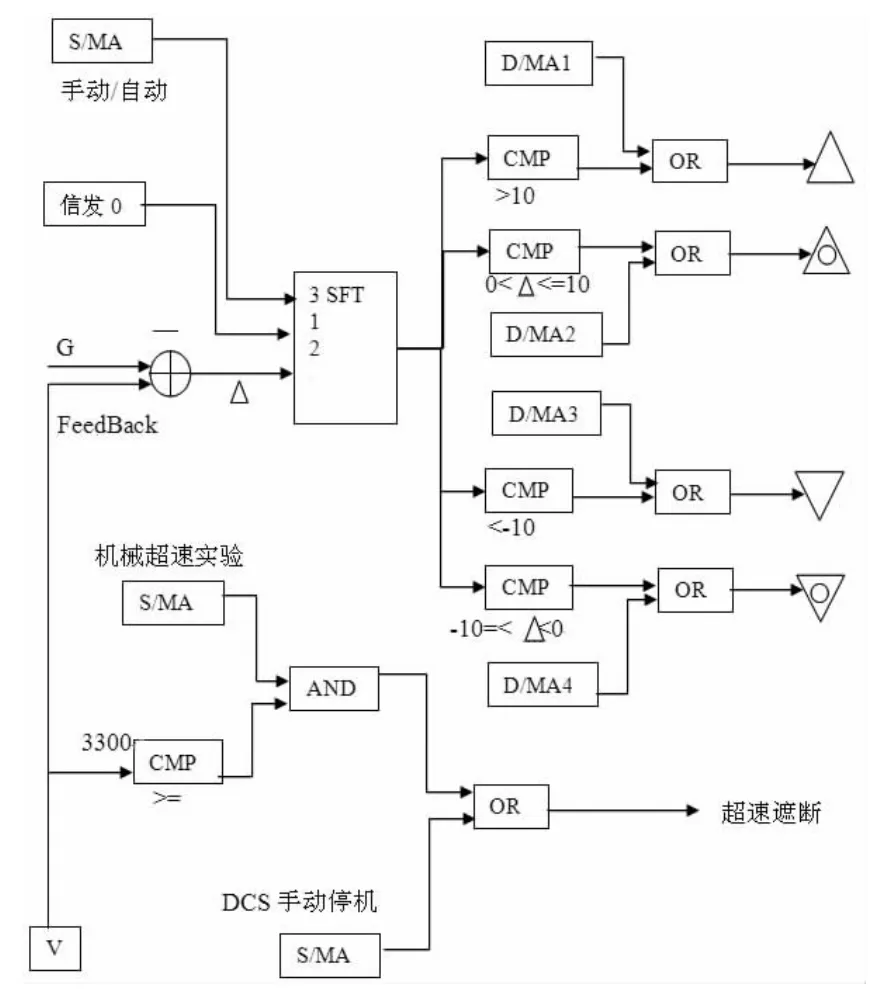
图6 DCS闭环控制程序
开环/闭环控制程序(如图6)
经过改造后的MEH基本实现了程控/就地控制。远程手动良好,但由于PID整定后,及工况迁移等原因,使用一段时间后,存在自控偏差较大现象。常见故障如阀门振动大,过灵敏,或关闭不严之状,所以需必要的参数重整定;还有人为操作顺序不合理造成的连锁保护,需要将投入、保护信号复位后,方可继续使用。
[1]吴勤勤.控制仪表及装置[M].化学工业出版社,2002.
[2]侯志林.过程控制与自动化仪表[M].兵器工业出版社,1989.
[3][日]吉野新治.电厂技术[M].中国计量出版社,1993.
[4]王庆有.光电技术[M].电子工业出版社,2005.