背景提取算法在雷达视频图像中的应用*
2013-11-28孙宇宸
熊 伟 孙宇宸 刘 奇
(1.海军航空工程学电子信息工程系 烟台 264001)(2.海装军械装备部弹药武器处 北京 100038)
1 引言
背景提取算法是通过处理连续图像,将其中的运动物体剔除,从而获得只含有静止物体(如:房屋、静止的汽车等)的图像的一系列图像处理方法,这些算法可以将视频图像中静止的或者是遵循一定规律运动的物体提取出来。近年来,背景提取算法已经成为来国内外诸多学者研究的重点课题。背景提取算法的应用非常广泛,最典型的是交通道路视频检测[1~5]。通过对交通道路进行背景提取,可以有效地检测出某一路段的车流量等信息,从而为交通部门进行车流疏导提供参考依据。背景提取算法应用在雷达视频图像中可以将雷达视频图像中的固定目标、岛屿等识别并且提取出来,从而更快捷、清晰地捕捉雷达图像中的动目标信息,提高对雷达视频图像中运动目标的跟踪性能。
国内外专家学者已经针对背景提取提出了诸多方法[6]。常见的背景提取算法有:多帧平均法[7~8]、统计中值图法[9~12]、混合高斯模型法等[13~19]。本文将这几种典型的背景提取算法应用在雷达视频图像中并进行仿真分析,通过比较,找出现有的背景提取算法在雷达视频图像背景提取中的优缺点,为进一步的算法研究打下较好的基础。
2 背景提取算法
2.1 多帧平均法
多帧平均法是利用图像中每个像素的灰度信息(灰度即亮度)进行背景提取的方法。在雷达图像中,由于各种景物的雷达反射回波的强弱不同,图像中呈现出亮度不同的区域。由于图像中的杂波具有多样性,其灰度值出现大于、小于或者与背景的灰度值相当的情况。从统计学的角度看,在一段时间内,由于杂波变化引起的图像灰度值的改变可以通过求平均值加以消除。因此,我们可以将多帧平均法用在雷达视频图像的背景提取中。
多帧平均法的原理是用累加平均法将雷达视频图像中的噪声消除。由于雷达视频图像的大部分噪声是随机的,不同帧之间的噪声明显不同,通过多帧平均,可以将噪声消除,从而提取雷达视频图像中的背景。多帧平均法可以用如下公式表示:

式(1)中,Background(x,y)表示背景图像;N 表示总的帧数;imagei(x,y)表示第i帧图像。
多帧平均法具有模型简单、计算方便等优点。但是,当图像中某一点的灰度值大范围波动时,会造成提取的背景图像中呈现亮暗分布不均匀的情况,随着帧数的增多,这种情况会有所改善。在处理雷达视频图像时,由于图像中的运动物体速度较慢,该方法不能准确捕捉运动物体,会将慢速运动的舰船误识别为背景。
2.2 统计中值法
统计中值法是基于排序理论的背景提取方法,这种方法的特点是可以有效地抑制噪声中非线性信号。在光学视频图像的背景提取中,这种算法的优点在于可以克服线性滤波带来的模糊影响,很好地保持图像的边缘特性。由于雷达视频图像中的随机噪声大部分都不是线性信号,所以,该算法对雷达视频图像中的随机噪声有很好的识别效果。
统计中值法的思想和数字图像处理中的中值滤波的思想相似,就是把图像中某个像素点的值用其领域中各个像素点的中值代替。描述为:将序列x1,x2,…,xn中的数据按照从小到大的顺序排列,组成新的序列xi1,xi2,…,xin,中值y可以表示为

统计中值法进行雷达图像处理的时候,有效地减轻了算法的复杂程度,较好地保护了边缘信息,但是这种算法无法为图像序列的变化给出严格的统计解释,同时,在处理背景差值的时候无法对偏差做出估计。
2.3 混合高斯模型法
混合高斯建模是从单高斯建模发展而来的。单高斯模型的核心思想是假设每个像素点的亮度值服从高斯分布N(μ,σ2),噪声认为是白噪声。混合高斯模型将每个像素的亮度值用K个高斯分布来建模,同时对这K个高斯分布设定优先级,按照优先级从高到低的顺序排列,设置适当的背景权值和阈值,只有符合阈值的分布被认为是背景,否则认为是前景。在处理雷达视频图像的时候,可以利用该模型较高的自适应能力,对图像中不断变化的随机噪声进行剔除,同时,对于图像中运动较快的目标,该方法也有较好的辨别能力。
对高斯模型的描述较为复杂,详细描述见文献[16]、文献[17]。混合高斯模型背景提取算法是一个能处理多模情况而且自适应的背景提取算法。在光学视频图像背景提取时,这种算法提取的背景精确度较高,可以有效地识别运动物体和静止的背景。
混合高斯模型法是几种常用方法中背景提取效果最好的一种方法,这种方法基本不会受到光照强弱、杂波数量和种类等因素的影响。现有文献对混合高斯模型提出了很多改进,并且取得了一定的效果,比如文献[19],我们下一步的研究主要是针对高斯模型进行改进,将其更好的用在雷达图像的背景提取中。
3 仿真
3.1 仿真环境
本文利用装有Opencv(计算机视觉库)的 Microsoft Visual Studio 2008软件对第二章提到的各种算法进行仿真。选取的两幅雷达图像分别为晴朗天气和阴雨天气采集的民用导航雷达(JRC)视频图像。
3.2 仿真结果与分析
图1为本次选取的雷达视频图像中某一帧的雷达原始图像,其中图1(a)为晴朗天气原始雷达图像,图1(b)为阴雨天气原始雷达图像。图1中标明的区域一为雷达原始图像中的陆地区域,区域二为由于遮挡物导致的雷达信号盲区,区域三为雷达图像中的海洋区域,为了使观察方便,该三块区域在其他各个图像中不再标出。图1(a)中标明的目标一、目标二均为包含多个目标的群目标,为了方便观察,在下面的图像中不再分别标出,如果下文提及,则为相对应的目标(图1(b)同);图1(b)中表明目标一、目标二、目标三,其中,目标一为单目标,目标二、目标三均为群目标。
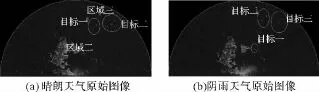
图1 原始雷达图像

图2 多帧平均法获取的背景图像

图3 统计中值法获取的背景图像

图4 混合高斯模型法获取的背景图像
分别对比图1、图2中相对应的图像(即对比图2(a)和图1(a),图2(b)和图1(b),下同)图2整体亮度变暗。图2中区域一相对应的区域除变暗外,其边界有模糊的迹象,这是由于雷达采集数据的时候,由于雷达的抖动造成的相邻帧图像中的陆地不能完全重合;图2中区域二中的雷达回波较强的噪声点明显变暗或者减少,这是由于这些噪声的随机性,使得多帧平均后被消除;图1(a)目标二和图1(b)目标三中的舰船在图2中均有明显被拉长的迹象,这是由于这些船运动速度较慢,多帧平均法无法将其消除。
对比图3和图1中相对应图像,图3整体变得模糊,但是仍旧保持了较好的轮廓信息。其中,区域一的陆地轮廓表现的较为清晰,图3中各个目标的舰船均出现模糊的趋向,这是由于运动的舰船的形状趋向于线条状,而统计中值法由于对边缘信息比较敏感,统计背景时会将这种近似于线条状的物体模糊化。
对比图4和图1中相对应图像,图4的清晰度明显高于图1。其中区域一的陆地区域的轮廓显示效果明显高于图1中的陆地轮廓,并且陆地中各种景物的回波更加清晰,基本没有模糊现象;区域二中的杂波数量大幅度减少,没有很明显的强噪声点。图1(a)中目标一和图1(b)中目标一、二中的目标被拉长并且模糊化,显示出了运动轨迹,通过这样的现象,我们可以判断,这两块区域中包含的目标在不断的运动,因此,可以将这些目标认定为运动目标。
通过对三种典型背景提取算法进行仿真分析,可以发现:背景提取算法应用在雷达视频图像的背景提取中既有其优点,也有其不足之处。优点在于由于雷达视频图像中不存在光照强度的变化对图像的影响,因此,这些算法应用在光学视频图像中时干扰较大的光照因素可以不予考虑;缺点在于由于雷达视频图像中大部分的目标运动比较缓慢,或者是在有限帧的范围内无法发生明显的位移,导致了在视频背景提取时会将这些目标误判为背景,使得背景提取不准确。总之,三种算法都能较好地排除雷达视频图像中的随机噪声,但是对运动不明显的目标敏感性较差。
4 结语
本文将三种最基本的背景提取算法应用在雷达视频图像的背景提取中,这三种算法分别从多帧平均、统计角度和高斯混合模型法的方向上体现了典型的视频背景提取算法的几种思路。鉴于篇幅原因,没有将其他典型算法,如:统计直方图法等一一列出,但是,通过本文的研究,我们足以发现视频背景提取算法应用在雷达视频图像的提取中具有一定的可行性,也具有较大的实用价值。
在今后的研究中,我们要以本文的仿真结果为基础,在分析现有背景提取算法在雷达视频背景提取中展现出来的优缺点的基础上,对现有算法进行改进,并且通过仿真实验不断发现问题、解决问题。雷达视频图像的背景提取是一个比较有研究价值的方向,如果能够找出好的方案精确地提取图像中的背景,将能够更加高效地实现对运动目标的跟踪。
[1]韩亚伟.视频交通流背景提取与运动目标跟踪检测技术研究[D].西安:长安大学,2009:10-34.
[2]GLOYER B,AGHAJAN H K,SIU K Y,et al.Vehicle detection and tracking for freeway traffic monitoring[C]//Conference Record of the Twenty-Eighth Asilomar Conference on Signals,Systems and Computers,1994:970-974.
[3]GUPTE S,MASOUD O,Martin R F K,et al.Detection and classification of vehicles[J].IEEE Transaction on Intelligent Transportation Systems,2002,3(1):37-47.
[4]赵有婷,李煦莹,罗东华.基于视频车辆轨迹模型的交通事件自动检测方法研究[J].中山大学学报,2011,50(4):56-60.
[5]但妮.视频序列中运动目标提取与检测算法研究[D].南京:南京邮电大学,2009:32-47.
[6]PACCARDI M.Background subtraction techniques:a review[C]//2004IEEE International Conference on Systems,Man &Cybemetics,2004:3099-3104.
[7]樊晓亮,杨晋吉.基于帧间差分的背景提取与更新算法[J].计算机工程,2011,37(22):159-161.
[8]刘欣页,李文举,高连军,等.一种有效的道路背景提取与更新算法[J].微型机与应用,2012,31(7):46-48.
[9]LO B.P.L,VELASTIN S.A.Automatic congestion detection system for underground platforms[C]//2001International Symposium on Intelligent Multimedia,Video and Speech Processing,2001:158-161.
[10]CUCCHIARA C,CRANA C,PICCARDI M,et al.Detecting moving objects,ghosts,and shadows in video streams[J].IEEE Transaction on Pattern Analysis and Machine Intelligence,2003,25(10):1337-1442.
[11]苏礼坤,陈怀新.中值滤波的视频背景更新[J].光电工程,2010,34(1):37-41.
[12]KOLLER D,WEBER J,HUANG T,et al.Towards robust automatic traffic scene analysis in real-time[C]//12th IAPR International Conference on Patten Recognition.Jerusalem,1994:126-131.
[13]Stauffer C,Grimson W E L.Adaptive background mixture models for real-time tracking[C]//Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Fort Collins,Colorado,USA,1999:246-252.
[14]Elgammal A,Duraiswami R.Harwood D,et al.Background and foreground modeling using nonparametric kernel density estimation for visual surveillance[C]//Proceedings of IEEE.New York,USA,2002:1154-1163.
[15]Heikkila M,Pietikainen M.A texture-based method for modeling the background and detecting moving objects[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2006,28(4):657-662.
[16]李明之,马志强,单勇,等.复杂条件下高斯混合模型的自适应[J].计算机应用,2011,31(7):115-118.
[17]朱齐丹,李科,张智,等.改进的混合高斯自适应背景模型[J].哈尔滨工程大学学报,2010,31(10):1347-1352.
[18]王永忠,梁彦,潘泉,等.基于自适应混合高斯模型的时空背景建模[J].自动化学报,2009,35(4):371-377.
[19]张燕平,白云球,赵勇,等.应用改进混合高斯模型的运目标检测[J].计算机工程与应用,2010,46(34):155-158.