基于UUV支持的水下战场态势感知研究*
2013-11-28李敬辉吉顺东
杨 波 李敬辉 吉顺东
(1.海军工程大学电子工程学院 武汉 430033)(2.92858部队 宁波 315812)
1 引言
态势感知(Situation Awareness,SA)指的是在广阔的时空环境中去感知人们所关心的所有有用的元素,理解它们的意图并且能够以最快的速度识别出其身份。指挥员对整个战场上作战双方的态势信息的获取和理解,这是指挥员制定作战决策的前提。如果指挥员不能正确地把握和理解当前的战场态势信息,就无法制定合理的作战计划,也就无法赢得战争。
信息技术的发展,大大提高了陆地和空中战场的透明度,为指挥员能够实时或者近实时地“看到”战场上的情况提供了良好的技术保障。水下战场由于自身的特殊性,使得其与陆上、空中战场相比具有以下特点:水下作战平台难以高效通信;能源极难保障;水下节点易受海水侵蚀损坏。因此,各国海军一直梦想着真正实现对水下战场的态势感知,以充分发挥水下作战平台的作战效能[1~4]。
由于水声传播的特性使得水下信息传输相对隐蔽,因此采用具有一定自主性的无人水下平台(Unmanned Underwater Vehicle,UUV)实现对敏感海区的情报收集、监视与侦察(ISR),并可作为水下通信网络节点,从而实现水下战场信息的分发,如图1所示,具有独特的优势,亦是未来水下战场态势感知的关键。下面就UUV在水下战场中运用的裨益分析。
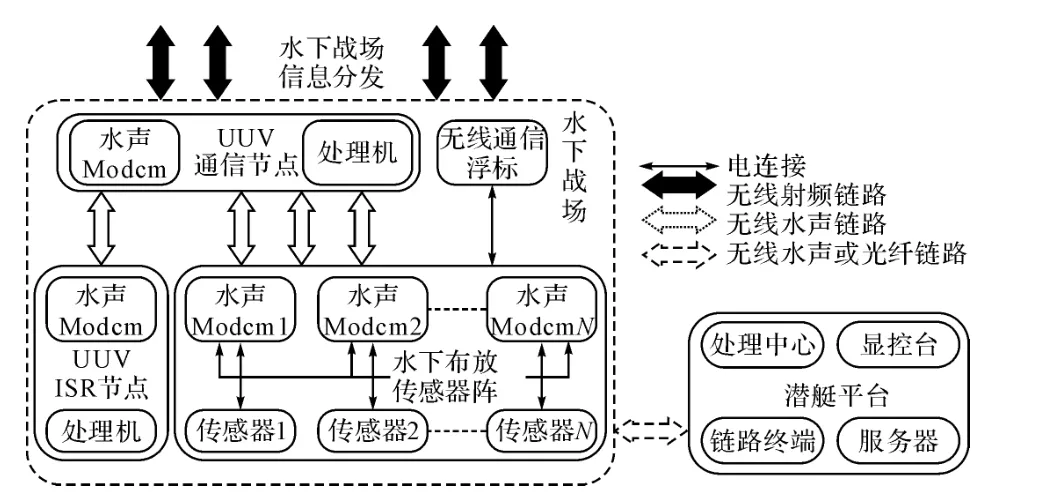
图1 水下战场信息的分发
无人系统的使用越来越多,从空中到地面,直至水下,不断展示它们着新的用途。美军认为,UUV系统将为“部队网”(Force Net)提供关键的水下能力,对战场的完整图像做出贡献。针对目前海军发展现状,只有适当借鉴国外先进的军事思想和成熟的技术,充分利用现有资源,着力构建基于UUV支持的水下信息网络,才能适应未来水下战场态势感知的需要[5~6]。实施以UUV为关键节点的水下信息网络的优势主要有:
1)使水下战场态势一目了然成为可能
利用UUV对水下战场中的传感器进行组网,不仅可以全面获得水下信息,综合分析整个战场信息,掌握敌我水下战场态势和敌方意图,而且可以与水面、空中和太空其它网络连为一体,对各方面信息进行全面分析,实现综合评估战场全局的目的。
2)使分散配置的武器节点易于发挥整体优势
具有隐蔽性好,机动能力强,可携带不同有效载荷等特点的UUV能够对敏感区域进行信息收集,并通过水下网络将情报、监视、侦察信息及时传输,使得指挥决策网络选择最佳武器类型、作战模式和攻击时机,水下武器的作战效能发挥将不再受地理条件的制约,使得分散配置的潜艇、鱼雷、水雷、干扰器、诱饵等发挥更大的作战效能,取得最大的作战效果。
未来的海战场特别是水下攻防对抗将日趋激烈,成体系发展水下联合攻防武器装备,拥有水下区域信息网,提高对作战海区的情报、监视与侦察能力,全面掌控战场,达到在潜艇战、反潜战、水雷战和反水雷战时的战场单向透明,进而夺取水下的制海权,是形成水下战略威慑与实战能力,进行综合防御不可或缺的重要手段。
2 UUV在水下作战网络中的研究现状
所谓水下作战网络就是在一定水下区域内,通过各种传感器节点获取水下信息,并对水下节点进行声学通信和组网,最终通过特定的节点向岸上、水面和空中的作战单元进行信息分发,并可以向潜艇进行信息发送[4]。利用水下作战网络,指挥员对水下战场进行态势感知和指挥决策。
2.1 “飞行插入”概念
20世纪90年代中期,美国空间与海战系统司令部提出“飞行插入”(Flying Plug)概念并进行了试验。所谓“飞行插入”,就是利用一次性光缆拖曳小型UUV作为“插头”(Plug),通过特定的“插座”(Socket),实现潜艇、UUV、水面舰艇及飞机与遥控的有线传感器网及通信浮标的连接。潜艇等平台通过发射带有光缆的UUV,就可以与数据存储节点的“插座”连接,使潜艇在防区外保持隐蔽状态的同时,仍能进行远程、高速率通信,从而达到水下战场的态势感知。图2是“飞行插入”概念中的UUV及其“插座”,它们可以在网关浮标和分布式遥测传感器之间构建临时性链接。

图2 “飞行插入”概念中的UUV(左)及其“插座”(右)
2.2 “海网”
“海网”(Seaweb)是目前规模最大、最成功的在研水下网络项目,由美国海军研究办公室(ONR)、空间与海战系统司令部负责研制。美国海军自1998年起,平均每两年进行一次海网的海底水声通信试验。2003年,SLOCUM UUV作为“海网”的网络移动节点,累计工作了300小时,由6个重发器节点(Repeater Nodes)、两个网关节点(Gateway Nodes)组成Seaweb网络,支持与UUV的通信与导航。试验证明了UUV在固定的自主水下网络的支持下,可以组成自主的移动舰队,图3是Seaweb网络与SLOCUM UUV的试验的场景。

图3 Seaweb网络与SLOCUM UUV的试验
2.3 近海水下持续监视网

图4 PLUSNet作战使用设想图
近海水下持续监视网(PLUSNet)是美国海军2006年披露的。它是一种半自主控制的海底固定+水中机动的网络化设施,由携带半自主传感器的多个UUV组成,如图4所示。这些UUV能够互相通信,并在没有人为指令的情况下做出基本决策,从而履行多种功能,包括对温度、水流、盐度、化学成份及其它海洋元素进行取样,密切监视并预测海洋环境。PLUSNet的关键系统包括装有微型调制解调器的“海马”、“金枪鱼”自主式UUV及“奥德赛”、“海洋”、“斯洛克姆”、“X射线”等滑行式 UUV。
3 主要功能模块及结构分析
为了实现基于UUV支持的水下战场态势感知,主要应包括水下传感器协同探测、水下传感器组网、多传感器信息融合等功能模块[6~7]。图5是各主要功能模块的信息流程图,图6是UUV支持的水下战场态势形成模型。

图5 主要功能模块的信息流程图

图6 水下战场态势形成的模型
3.1 水下传感器协同探测
当探测固定目标时,由于固定目标(如声纳阵列、水雷、海底)一般不会向外发射物理场,UUV要充分利用机动性的特点,可以主动对其探测,并与其它固定节点的传感器实现对目标的协同测绘与定位,此时的协同探测网是并列的网络结构形式[8]。当对运动目标进行探测时,由于需要的UUV数量增多,固定节点的传感器难以满足要求,此时的协同探测网为主从网络结构形式,在多UUV协同警戒探测时,可以根据任务和环境的变化自动构成分布合理、探测区域最大化的水声探测网络。按照多机器人系统的群体体系结构有集中式结构、分布式结构和分层式结构三种[9],如图7所示。

图7 多UUV系统
3.2 水下传感器组网
水下传感器和水声调制解调器(Modem)是组成水下信息网络的基本设备,而把这些基本设备连接起来的技术称之为水下传感器组网技术。水下传感器组网技术是一类技术的集合,它涉及到水声数据的交换技术、传输技术、共用系统技术和宽带接入技术等。随着UUV技术的发展,移动设备水下组网越来越显示出可行性[10]。如图8所示的水声网络拓扑图中将UUV与传感器按照传感器簇进行了划分,因此包含UUV的水声网络才是一个完整的水声网络。UUV的移动性及水下组网的需求是两者有效结合的一个契机。UUV可以携带多个水声调制解调器或其携带的调制解调器具有多个频段。由于UUV遂行任务时的移动性,使得水下网络节点之间的间距不断变化,虽然给水下组网的路由协议带来挑战,但是水下组网的可覆盖区域大大提高。
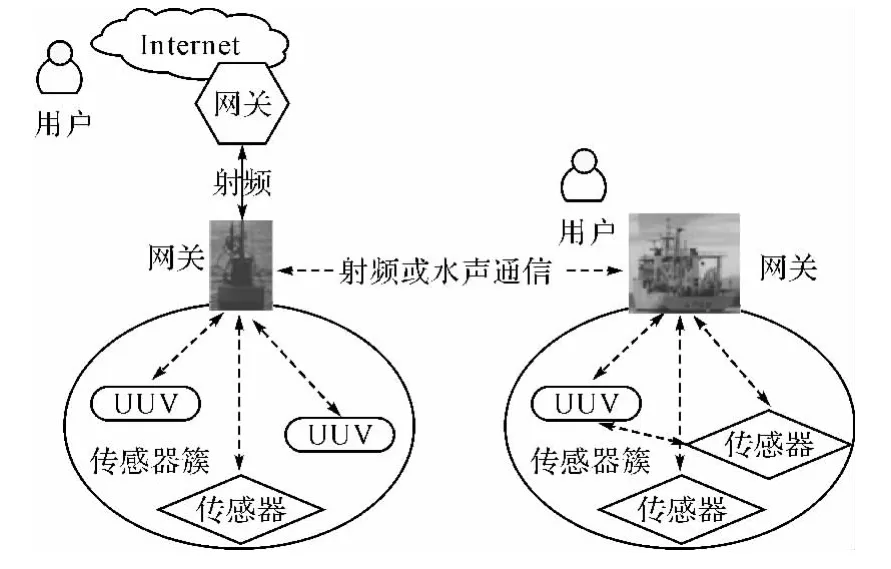
图8 水声网络拓扑示意图
3.3 多传感器信息融合
通过多传感器的信息融合,可以把来自不同类型、测量同一区域的不同物理特征的传感器的近乎同时的观测准实时地结合起来[7,10]。环境监测UUV既可以利用自身的传感器对周围环境进行探测又可以通过水声通信将区域内分布式传感器的关键信息进行收集整理,再利用中继通信UUV将其向上一级网关UUV或潜艇传递,如图9所示。多传感器信息融合技术的关键问题主要包括:战场统一态势的形成;精确标定水下传感器位置,并进行坐标变换;统一时间标准。所以,在水声通信网络支持下的水下多传感器信息融合将是水下战场态势感知的有力支撑。

图9 UUV在多传感器信息融合中作用
4 结语
从国外水下战场态势感知的发展来看,进行这方面的研究对提高水下战场的态势感知具有重要意义。UUV可以利用自身的隐蔽性进行水声通信,通过一定规则的移动实现水下网络的连通性。作为除潜艇之外的又一水下平台,UUV为解决水下战场的态势感知开辟了有效的途径,值得进一步深入探索。
[1]陈军,杨致怡.未来海战中的态势感知[J].雷达与对抗,2007,31(1):4-7.
[2]刘彬,宋庆杰,徐强.信息化战场态势感知能力发展及其影响[J].国防大学学报,2012,12(3):32-35.
[3]胡悦.水下通信系统综述[J].探测与定位,2011,12(4):61-68.
[4]李耐和.外军构建水下作战网络[J].现代军事,2007,12(7):46-50.
[5]赵良明,刘卫东.水下网络中心战概念与框架研究[J].声学技术,2009,26(12):136-139.
[6]綦辉,蔡云祥,宋裕农.基于UUV支持的水下协同作战研究[J].火力与指控控制,2009,21(3):96-101.
[7]杨露菁,余华.多源信息融合理论与应用[M].北京:北京邮电大学出版社,2005:78-93.
[8]陈玮,吴泽伟,吴晓峰.UUV协同探测的现状与发展前景[J].舰艇电子工程,2009,32(2):6-8.
[9]谭民,王硕,曹志强.多机器人系统[M].北京:清华大学出版社,2005:101-105.
[10]董阳泽,张刚强,印明明.网络化水声对抗技术[M].北京:电子工业出版社,2012:96-98.
