城市轨道车辆交流传动试验系统研究*
2013-11-27王俭朴
王俭朴
(南京工程学院 车辆工程系,江苏南京211167)
城市轨道交通车辆都采用的是电力牵引,随着科学技术和城市化的发展,大运量的城市轨道交通在现代大城市中的重要作用尤显突出。交流传动技术的优越性使得牵引动力交流化成为大功率牵引领域的主要方向之一,在我国,交流传动机车将全面取代直流传动机车。为了研制和生产符合我国国情的交流传动系统,必须加强对大功率交流传动系统的研究和开发,国内也有类似的试验台,如永济电机厂的城市轨道交通电传动系统模拟联动试验站,但它采用的是飞轮负载,占地空间大,造价高,建设周期较长。本文研究的城市轨道车辆交流传动试验系统由两套“逆变器—电机”连轴背靠背组成,两台电机能量互馈,电能在两台电机之间反馈,或是将电能反馈给储能变流装置。可以节约大量电能,所消耗的仅是两台电机之间的机械损耗。具有能量利用率高、结构简单、控制灵活、提高输入侧和输出侧的功率因数、能有效地对控制策略的特性进行比较等优点。该试验系统应具备牵引特性和牵引控制试验,制动特性和制动控制试验,逆变器工作特性试验,进行电力牵引及电制动系统开发的功能。
1 城市轨道车辆交流传动试验系统的原理及组成
城市轨道车辆交流传动试验系统的结构如图1所示。系统采用一台功率较大的整流装置给两台逆变装置供电,组成两个逆变器并联在一起的共直流母线系统。调压器和三相全桥整流滤波电路的组合是将三相380V电网交流电变流为500~900V的直流电来模拟750V直流供电网。系统采用交流异步电动机作为模拟负载,不但节省空间,而且大大降低了成本。由两台牵引逆变器分别控制2台75kW的交流异步电机,牵引电机M1与模拟负载的电机M2分别采用力矩和速度两种不同的控制方式,电机可在控制电路和牵引逆变器的共同作用下实现在牵引工况、再生制动工况和电阻制动工况之间进行转换。本系统通讯模式采用串口RS485总线实现工控机与系统之间的通讯。由图1可见,牵引电机M1与模拟负载的电机M2通过直流侧实现能量互馈,电网只提供试验损耗的能量,当城市轨道车辆交流传动试验台在电制动工况下,能量可以从直流侧通过储能制动变流器来实现超级电容储能再生制动和电阻制动,在牵引工况下,可以将超级电容器在制动工况下存储的电能输送给牵引系统,从而实现列车制动时动能的再生利用。
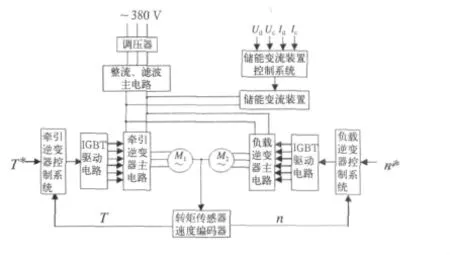
图1 城市轨道车辆交流传动试验系统
此系统可进行牵引特性和牵引控制试验,制动特性和制动控制试验,逆变器工作特性试验,通过对模拟负载以速度方式控制,可以在没有飞轮负载的情况下,模拟列车在预定线路预定载荷及司机手柄位控制下的运行情况。该系统采用TMS320F240芯片作为核心器件构成整个控制回路。逆变部分采用智能功率模块(IPM)将功率管IGBT及其驱动、保护等电路集成在一起,使主回路设计简单、工作更加可靠。
2 城市轨道车辆交流传动试验平台的主要工作电路
试验系统的设计应该具备的功能是能够进行模拟试验,设计试验系统的工作电路能实现这些功能。城市轨道车辆交流传动试验平台的主要工作电路包括:主电路、电源系统、调压整流电路、工况电路、工况转换控制电路和储能制动变流器等。对工作电路的各个组成环节进行分析,对它们的工作原理进行阐述说明,确保满足试验系统的要求。这里主要介绍主电路和储能变流装置的设计。
2.1 主电路设计
系统主电路采用典型的交—直—交电压型变频结构。由调压器、整流滤波、逆变器和电动机4部分组成。系统要求模拟750V直流接触网供电,并在500~900 V之间可调。由于试验系统采用的调压器体积庞大,不适于直接手动控制,所以配有一台电动机及蜗轮蜗杆机构,通过点动开关控制电机的正反转来进行调压。采用三相桥式不可控整流电路,整流电路和逆变电路之间采用大电容构成突波吸收器,有效滤除整流环节所产生的高次谐波,防止电网和负载之间的相互干扰。电容滤波给后级的逆变器提供相对恒定的直流电压。使用时需先给电容充电,待充满后才能直接接到不控全桥整流的输出端。否则会产生很大的电流而烧坏整流器件,不使用主电路时要给滤波电容放电,否则因电容两端的放电作用而发生事故。另外,若后级逆变器输出电流太大或出现故障,要及时给后级逆变器断电并增大前级电路的电阻,以减小电流。逆变电路选用IPM。
2.2 储能变流装置设计
储能变流装置主要与供电系统相连。该系统中储能制动变流装置的高压端直接并联在牵引逆变器的支撑电容CF上,CF兼作储能制动变流装置的高压输出电容。超级电容作为储能变流装置的核心部件,主要是依靠电容极板将能量以电能的形式来储存,直接向直流电网进行能量的释放和吸收,无需转换能量的形式,从而使得该装置可以快速的与直流电网进行能量的交换,具有很高的效率。储能变流装置的优点是高能量密度、负载循环使用周期长,具体表现为可以减少直流母线中的能量损耗。储能变流装置不仅能够降低地面制动电阻的额定功率以及散热的额定容量,同时可以很大程度的改善电机的启动性能。
2.2.1 储能变流装置的电路拓扑及工作原理
储能变流装置在其控制系统控制之下工作于3种状态:充电状态(储能再生制动)、放电状态(储能电容器释放电能)及保持状态(电阻制动),为满足这一要求,储能制动变流装置的主电路拓扑如图2(a)所示。
(1)充电状态
牵引电机处于制动工况时,系统将电机的机械能转变为电能。此时若中间直流环节的电压Ud高于其允许值,且超级电容器电压UC低于其最高允许电压值,则储能变流装置为超级电容C充电;在储能变流装置控制系统控制下,图2(a)中T2、TRZ均关闭,用PWM 方式控制开关管T1,此时双向DC-DC变换器工作在Buck电路状态,则系统通过T1、LN、C、D2组成的降压电路为超级电容器C充电,将电制动产生的电能存储于超级电容器中,实现了储能制动。储能再生制动的电路拓扑结构如图2(b)所示。
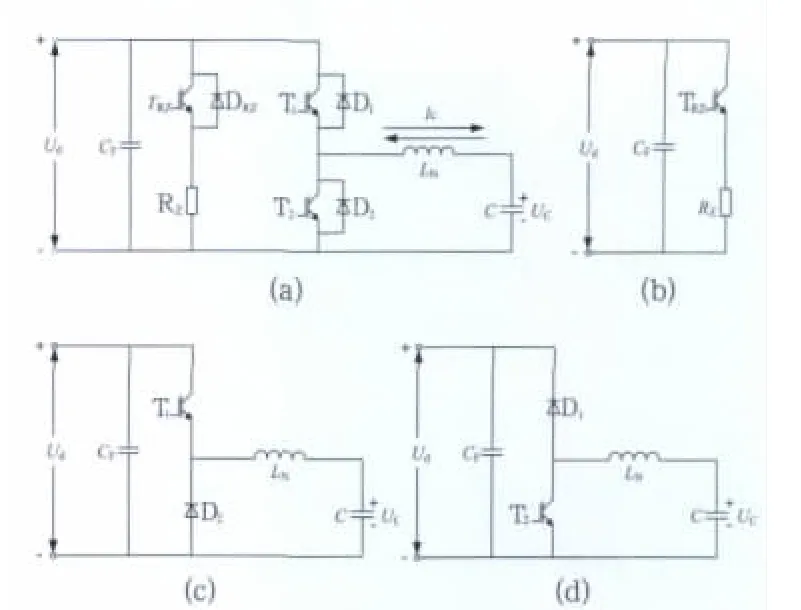
图2 储能制动变流器的电路拓扑
(2)保持状态
牵引电机处于制动工况时,若在充电过程中,超级电容器电压UC高于其最高允许电压且中间直流环节的电压Ud高于其允许值,则系统在储能变流装置控制系统的控制之下转入保持状态(电阻制动工况)。电阻制动的电路拓扑结构如图2(c)所示。在储能变流装置控制系统控制下,用PWM方式控制开关管TRZ,此时变换器工作在Buck电路状态,则电制动过程中产生的电能消耗于制动电阻RZ上,实现电阻制动。
(3)放电状态
牵引电机处于牵引工况时,若超级电容器电压UC高于超级电容器工作电压下限,储能变流装置将超级电容C与牵引逆变器的支撑电容CF并联为牵引逆变器供电,从而使得再生制动的能量被再次利用,直至超级电容器电压低于超级电容器工作电压下限。储能变流装置在放电状态下的电路拓扑如图2(d)所示。在储能变流装置控制系统的控制下,用PWM方式控制开关管T2,此时双向DC-DC变换器工作在Boost电路状态,则超级电容器中储存的电能经由D1、LN、UC、T2构成的升压电路向直流环节释放电能,储能变流装置工作在放电状态。
2.2.2 储能变流装置的控制策略及其控制流程
为了避免中间直流环节母线电压升高,提出将再生能量通过储能变流装置存储起来,试验系统需要时再回送给系统,试验过程中通过检测中间直流环节母线和超级电容器的电压,预先设定它们充放电的电压阈值,采用基于“能量法”的控制策略实现能量的双向流动,完成能量的存储与释放。储能变流装置的控制策略及其控制流程如图3所示。
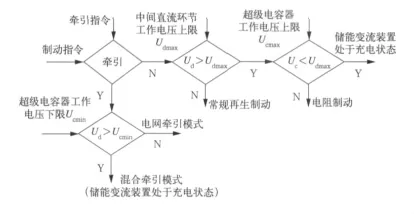
图3 储能变流装置的控制策略及其控制流程图
2.2.3 超级电容器容量的确定
超级电容器容量C应保证当其电压由UCmin变化到UCmax时足以存储牵引电机处于制动工况时系统所具有的机械能Wr,C应满足下式要求:

η为系统电能变换效率,取η=0.85

本系统中,双向DC-DC变换器的最低电压为300V,超级电容器组的工作电压范围设定在300~450V,根据牵引计算结果,电机的牵引能量最大为1 319.32kJ,由式(2)可得,存储再生制动能量所需超级电容的总容量C≥19.94F,则超级电容器的基本参数为20F、480V,最大允许电流不低于1 000A。
3 城市轨道车辆交流传动试验功能
城市轨道车辆交流传动试验平台可以模拟列车进行牵引特性试验、模拟列车制动特性试验以及逆变器的开发试验等。
3.1 模拟列车牵引特性试验
通过输入牵引特性的控制指令,使试验系统处于模拟列车牵引工况的状态。其中牵引电机由力矩控制,负载电机由转速控制。牵引工况时,牵引电动机的力矩由牵引控制系统根据司机手柄位以及电机的速度实时控制。在牵引力矩的作用下,负载电机的速度逐渐增加。通过城市轨道车辆交流传动试验台的测试系统,得到试验系统的实际转速,然后由这些速度值和对应牵引力矩下的牵引力可得到牵引力与速度的关系曲线。设置另一牵引手柄位,则又可以得到牵引力与速度的关系曲线。通过城市轨道车辆交流传动试验台的测试系统,还可得到试验过程中系统的工作电流和工作电压。试验系统还可以设置不同牵引手柄位来模拟列车不同的牵引特性曲线,同时检测列车在牵引工况时的速度、工作电流和工作电压。
3.2 模拟列车制动特性试验
通过控制电路使试验系统转换至制动工况,通过运行测控系统向通信接口输入电制动特性控制指令,使试验系统处于模拟列车电制动工况的状态:包括电阻制动工况和再生制动工况。模拟列车制动特性试验的原理和模拟列车牵引试验的原理基本一致,这里就不再赘述。
3.3 模拟逆变器的开发试验
模拟列车上负载逆变器或牵引逆变器的直流变交流逆变过程的功能。不同功率等级的逆变器可为不同功率等级的电机工作。逆变器提供工作电流、工作负载以及控制接口,逆变器处于不同的工作状态能够接受速度控制或力矩控制,从而可进行逆变器的开发试验。此试验系统可以检测逆变器工作所能承受的功率、电流和电压。同时牵引逆变器和模拟负载逆变器都应具备通信接口,以便接受计算机的通信信号,执行计算机的操作指令。
4 城市轨道车辆交流传动试验台测试系统
城市轨道车辆交流传动试验台测试系统应能实现电机运行状态信息的采集和显示功能。测试系统是城市轨道车辆交流传动试验台的一个重要组成部分,也是系统和被测对象的接口部分,所以需要有足够的测量精度,测试系统的准确与否,直接关系到城市轨道车辆交流传动试验台能否满足可靠性和实时性要求。其主要功能是试验数据的采集和分析处理,主要任务是把在不同试验下各种状态的参数真实地反映给系统。测试系统主要由3大部分组成:工业仪表或传感器、数据采集卡和工业控制机。电流、电压和速度检测分别采用霍尔传感器和2 000脉冲/转的光电脉冲发生器。城市轨道车辆交流传动试验台测试系统结构如图4。
数据分析处理功能包括:实时测量和显示各种参数及其波形、数据存储、数据回放、数据后处理和图形报表生成等。
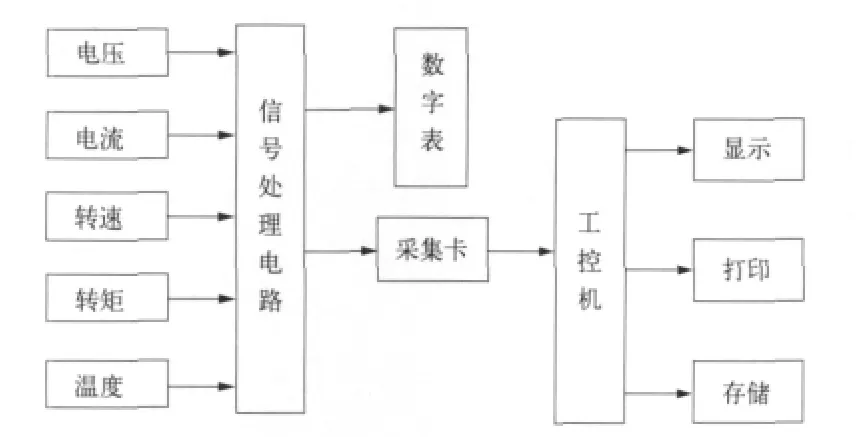
图4 测试系统结构框图
5 结束语
随着我国城市轨道交通的发展,交流传动技术也将逐步发展成熟,有必要建立一个性能优良的试验平台以便对交流传动系统进行研究、开发和验证。本文提出了一种能量互馈式城市轨道车辆交流传动试验系统方案,该交流传动试验系统具有实时性好、可靠性高的特点,完全适应我国城市轨道交通发展的需求。此系统可进行牵引特性和牵引控制试验,制动特性和制动控制试验,逆变器工作特性试验,列车在预定线路预定载荷及司机手柄位控制下运行的实时模拟试验。另外,还可以进行轨道车辆电力牵引及电制动系统的开发。系统具有节能、工作可靠,精度高等特点。
[1]李 伟,张 黎.交-直-交传动系统网侧变流器预测电流控制方法的计算机仿真及实现[J].中国铁道科学,2002,(6):49-54.
[2]郑琼林.交流传动互馈试验台与磁场定向控制和直接转矩控制的比较[J].电力电子,2004,2(2):18-21.
[3]胡继胜,马 勇,王 宁.轻轨车储能再生制动系统电路型式及主要技术参数的确定[J].大连交通大学学报,2011,32(2):69-73.
[4]卞永明,兰 皓,蒋 佳,等.轮边电力驱动系统再生制动控制技术研究[J].中国工程机械学报,2011,9(1):59-62,97.
[5]郭文杰,林 飞,郑琼林.交流传动互馈试验平台整流器研究[J].铁道学报,2006,28(1):31-34.
[6]张全柱,邓永红,潘玉民.交流牵引传动能量互馈试验台的研究[J].电气自动化,2007,26(6):11-13,16.
[7]刘护林,陈高华,王鹏魁.互馈式交流传动试验系统[J].机车电传动,2008,(4):52-56,68.
[8]李继方,汤天浩,姚 刚.多电机共直流母线交流传动节能系统结构研究[J].电气传动,2011,41(7):8-12,29.
[9]陈伟华,李秀英,姚 鹏.电机及其系统节能技术发展综述[J].电机与控制应用,2008,35(10):1-6.
[10]王云飞,杨 耕.通用变频器-感应电机系统的电机耗能型制动控制方法[J].电工技术学报,2006,21(1):87-92.