一种基于光学定位的超声探头标定方法
2013-11-27邱天爽
任 亮 邱天爽 郭 勇
(大连理工大学生物医学工程系,大连 116024)
引言
超声影像在医学诊断和治疗中的应用被得到广泛认可[1]。与 X-ray、CT、MRI相比,超声影像具有实时、多角度、无辐射损伤、廉价等优势,特别在穿刺活检和射频消融手术中得到广泛应用[2]。普遍使用的二维超声影像存在部分容积效应,使得病灶靶点在三维空间中的定位不准确,影响诊断和治疗效果;而三维超声影像可以提供更精确和丰富的三维空间信息,有利于病灶靶点的定位和后续手术操作。目前,重建三维超声影像的方法主要有3种[3]:二维超声探头机械扫描[4]、三维超声探头实时成像和手持二维超声探头扫描[5]。前两种方法改装后的探头体积大,限制其在手术导航中的应用,而手持扫描的方式仅需要进行超声探头标定。求解超声图像相对超声探头的空间变换矩阵的过程,称为超声探头标定[6]。
目前,国内外普遍采用基于平面N形模板的超声探头标定方法[7-8]。该方法在电磁定位条件下,用探头扫描N形标定模板,得到超声声束与模板交点的超声图像坐标和模板坐标;通过最小二乘法,分别标定出电磁发射器相对标定模板、超声图像相对电磁接收器的两个未知空间变换矩阵。该方法能够满足手术导航的精度要求[9],但是在电磁定位条件下,标定算法包含两个未知空间变换矩阵,共14个未知变量,平面模板空间信息少,需要采集大量的标定图像,计算量较大。另外,电磁定位设备易受手术导航环境中复杂的电磁场影响[10],且电磁接收器需要连接电源线,这会限制探头的活动空间。
为此,笔者采用一种区别于文献[7-8]的基于空间立体标定模板的超声探头标定方法,提出如下改进:一是在光学定位条件下,仅需要计算超声图像相对超声探头的一个未知空间变换矩阵,共8个未知变量,减少了未知量个数;二是新设计一种由两个互相垂直平面组成的空间立体标定模板,增加声束平面与模板交点的空间信息,且不需要已知模板的几何尺寸,制作简单。实验表明,本方法仅需要两幅标定图像即可完成标定,计算量小。当采用至少20幅标定图像时,标定精度约为2.5 mm;当采用至少40幅标定图像时,平均误差约为1.0 mm,标准差约为2.4 mm。
1 方法
1.1 数学模型
超声探头标定如图1所示。笔者设定4个坐标系,即标定模板坐标系M、摄像机坐标系C、超声探头坐标系D、超声图像坐标系I,3个空间变换矩阵TCM、TDC和TID。其中TCM是坐标系C到坐标系M的变换矩阵,TDC是坐标系D到坐标系C的变换矩阵,TID是坐标系I到坐标系D的变换矩阵。
笔者提出标定模板,由两个互相垂直的平面OMABC和平面OMCDE组成。在采集超声图像时,探头声束平面与标定模板的三坐标轴分别交于点F、G、H。设定标定模板坐标系M、摄像机坐标系C、超声探头坐标系D、超声图像坐标系I的坐标轴,如图1所示。光学定位设备由两个型号相同的摄像机组成,利用文献[11]的方法标定摄像机。设标定模板与探头声束交于点P,则标定公式


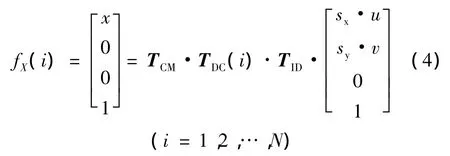
式中,PM= [XM,YM,ZM,1]T是点 P 在坐标系 M 下的空间坐标,PI=[sx·u,sy·v,0,1]T是点 P 在坐标系I下的图像坐标,sx和sy是需要标定的未知比例因子,变换矩阵TCM和TDC可以由光学定位设备获得,TID为待求的变换矩阵,包含 tx、ty、tz、α、β、γ共6个未知空间变量。
在标定过程中,坐标系M和坐标系C固定不动,手持超声探头在摄像机视野内移动并扫描标定模板。在超声探头采集超声图像的同时,采集探头在摄像机中的图像,求解超声图像坐标系I与超声探头坐标系D的变换矩阵TID的过程就是超声探头标定过程。
1.2 标定算法
如图1所示,对于点F,根据式(1)有

按式(3)中左侧的两个零元素展开,可以得到关于未知量 TID(tx,ty,tz,α,β,γ)、sx和 sy的两个标定方程。同理,对于Y轴和Z轴上的点G和点H,可以分别得到两个标定方程,所以每幅标定图像可以得到6个标定方程。有8个未知量,当标定图像数量N满足6N≥8时,即采用至少2幅可以非线性优化求解。
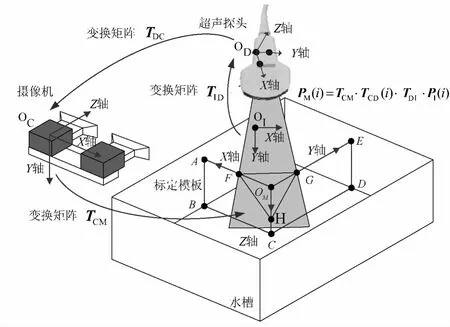
图1 超声探头标定Fig.1 Illustration of ultrasound probe calibration
根据式(3),对于超声声束与坐标系M的X轴的交点,设
令 fX,2(i)=0 和fX,3(i)=0,分别对应式(4)左侧两个零元素展开得到标定方程。同理,有fY,1(i)=0、fY,3(i)=0 和 fZ,1(i)=0、fZ,2(i)=0。构造目标函数

令 ψ = [tx,ty,tz,α,β,γ,sx,sy],当 N ≥2 时,堆叠标定方程组 f(ψ)= [f1(ψ);f2(ψ);…;fN(ψ)],则

根据 Levenberg-Marquardt算法,有

式中,η是设定的迭代收敛因子,I是单位矩阵。每次迭代后,更新J和Δf,直到Δψ趋近于0时,ψ即为笔者所求的标定参数。
2 实验
2.1 仿真数据实验
按照式(2),利用 Matlab随机生成1组 TCM,100组TDC(i)、100组包含超声声束与标定模板3个交点的超声图像坐标PI(i)。根据式(6),令每组实验3个交点F、G、H模板坐标的零元素估计值为)=[fF,2(i);fF,3(i);fG,1(i);fG,3(i);fH,1(i);fH,2(i)],理论值为fi(ψ)=[0,0,0,0,0,0],标定误差为每组有3个交点,统计N组实验的标定平均误差为其中,2≤N≤100,评价式(8)的标定平均误差Emean和标准差随标定图像数量N增加的变化趋势,每组实验重复100次。

2.2 真实数据实验
2.2.1 实验材料
实验平台如图2所示,标定模板由两块互相垂直的平整光滑的玻璃板A和B组成,长宽高分别为250 mm×150 mm×200 mm,板厚为3 mm。在实验中,一台PC机通过图像采集卡与光学定位设备和超声仪器连接,利用图像采集软件,保证在采集摄像机图像的同时触发采集超声图像,光学定位设备由两个型号相同的摄像机组成,图像分辨率均为1024像素×768像素,利用文献[11]标定摄像机后空间点重建精度可以达到1 mm。在模板表面,粘贴黑白棋盘格特征标识物,识别棋盘格角点并重建角点的三维坐标,根据解析几何原理,计算摄像机坐标系C到标定模板坐标系M的变换矩阵TCM;为保证超声在水槽介质中的传播速度与在人体中的传播速度一致,向水槽注入适量的50℃热水[7]。采用Aloka Prosund α7超声仪的腹部探头,在探头上粘贴黑白棋盘格特征标识物。
2.2.2 实验过程
实验主要包括4个步骤。
步骤1:将标定模板放入空水槽中固定,利用光学定位设备计算摄像机坐标系C到标定模板坐标系M的变换矩阵TCM;
步骤2:向水槽中注入适量的50℃热水,手持超声探头在标定模板上方以不同的姿态扫描标定模板,利用光学定位设备识别探头上的黑白棋盘格角点,并重建角点的三维坐标,继而计算超声探头坐标系D到摄像机坐标系C的变换矩阵TDC(i),通过软件触发方式在同一时刻采集超声图像,共采集100幅标定图像。
步骤3:手动选取识别超声声束与标定模板的3个交点F、G、H的图像坐标,如图3所示。
步骤 4:利用本方法计算 TID(tx,ty,tz,α,β,γ)、sx和sy,并评价式(8)的标定平均误差Emean和标准差随标定图像数量N增加的变化趋势。
3 结果
3.1 仿真实验结果

图2 实验平台搭建。(a)标定实物图;(b)标定模板Fig.2 Calibration setup for real experiments.(a)Calibration equipment;(b)Calibration pattern

图3 交点F、G、H的超声图像Fig.3 F、G、H in ultrasound image
标定图像数量由2~100幅,每增加5幅图像进行1组实验,评价式(8)的标定平均误差Emean和标准差随标定图像数量N增加的变化趋势,每组实验重复100次,标定结果如图4所示。随着标定图像数量的增加,标定平均误差和标准差均逐渐减小,且在仅有两幅标定图像的情况下,标定平均误差小于5 mm,当图像数量多于40幅时,标定平均误差小于1 mm,标准差约为2 mm,说明本算法具有较好的稳定性。

图4 标定算法的仿真实验结果Fig.4 Calibration results with simulation data
3.2 真实实验结果
标定图像数量由2~100幅,每增加5幅图像进行1组实验,评价式(8)的标定平均误差Emean随着标定图像数量N增加的变化趋势,每组实验重复100次,标定结果如图5所示。采用至少20幅标定图像时的标定平均误差约为2.5 mm,采用至少40幅标定图像时的平均误差约为1.0 mm,标准差约为2.4 mm。
本标定方法与文献[7-8]中各种方法的比较如表1所示。与基于电磁定位的方法相比,本方法在达到与Cambridge方法标定精度一致的情况下,所用的标定图像数量为40幅,且在标定精度方面优于文献[7]的方法和 Cross-wire、Single-wall、Threewire等3种经典方法,说明本算法具有较好的有效性。

图5 标定算法的真实实验结果Fig.5 Calibration results with real data
由此可见,本算法在光学定位条件下仅有8个未知量,所以只需要较少的标定图像即可完成标定;且本设计的立体标定模板增加了空间信息,有利于提高标定精度。本标定误差大于文献[1]的标定误差约0.1 mm,原因在于本标定模板的制作过程简单,为保证两平面的垂直和刚性,平面需要有一定厚度,这在超声图像中会造成一定的噪声,使手动识别超声图像中的特征点时产生误差,影响标定精度。
另外,随着标定图像数量的增加,本真实实验误差的减小速度快于仿真实验误差的减小速度,原因在于真实实验中的模板制作、环境光线等对图像识别引入不可避免的随机误差,图像数量少时随机误差影响较大,随着标定图像数量的增加,每组实验通过100次平均可以快速地减小随机误差,而仿真实验中不存在随机噪声,误差的减小趋势较为平缓,因此真实实验误差的减小速度更快。

表1 真实图像的标定结果Tab.1 Calibration results with real data
4 讨论
与文献[7-8]相比,笔者利用光学定位技术获取超声探头在空间中的姿态,需要求解的未知量个数减少为8个,进而降低了计算量。同时,在文献[8]的 Cross-wire、Single-wall和 Three-wire 等 3 种方法的基础上,将标定模板设计为由两个互相垂直的空间平面组成,增加了标定信息,仅需采集至少两幅图像即可完成标定。这些都说明,在光学定位下,通过增加标定模板立体信息,可以减少标定所需的图像数量和计算量。
由于本研究只是识别超声声束与标定模板在图像中的交点,在人眼的视野中无法识别出该交点的真实位置,因此无法评价该交点测量的精度,本研究通过对目标函数理论值的逼近程度来评价标定精度。这种评价方式与文献[1,7-8]中的Crosswire、Single-wall和 Three-wire 等方法一致。由表 1看出,本研究的仿真和真实实验结果在图像数量多于40幅时,平均标定误差约为1 mm,优于文献[7-8]的精度,满足超声影响导航手术的需求,并且在光学定位下不需要考虑手术室内电源线和电磁兼容的问题,使可标定的范围更广。
另外,可以考虑将本标定模板退化为空间单独的一个点,这样可以利用光学定位识别该点空间坐标作为真值,继而评价标定精度,但是需要采集较多数量的标定图像,这些是今后继续研究的内容。
5 结论
针对超声探头标定问题,笔者提出一种在光学定位条件下基于立体标定模板的超声探头标定方法,既减少了未知量个数,又增加了标定空间信息。在标定过程中,利用光学定位设备获取模板坐标系和探头坐标系的空间姿态,软件触发的同时采集超声图像和探头在摄像机中的图像,两正交平面组成的立体标定模板利用3组正交关系堆叠标定方程。本方法仅需要2幅以上标定图像即可优化求解出超声图像到探头的空间变换矩阵,计算量小,操作简便,且所求未知量仅有8个,少于同类文献的未知量数量。真实实验结果表明,采用至少40幅图像时的标定平均误差约为1.01 mm,标准差约为2.4 mm,在标定图像数量较少的情况下具有较高的精度,为进一步三维超声重建奠定了基础。
[1]ChaouiJ,Dardenne G,Hamitouche C,etal. Virtual movements-based calibration method of ultrasound probe for computer assisted surgery[C]//IEEE International Symposium on Biomedical Imaging:From Nano to Macro.Bostoa:IEEE,2009:1207-1210.
[2]徐静,杨向东,朱森强,等.用于肝癌介入治疗的术中三维超声导航系统[J].中国生物医学工程学报,2007,26(5):719-723.
[3]白培瑞,白净.基于二维阵列换能器的实时三维超声成像技术综述[J].中国生物医学工程学报,2011,30(6):938 -945.
[4]Nakamoto M,Nakada K,Sato Y,et al.Intraoperative magnetic tracker calibration using a magneto-optic hybrid tracker for 3 - D ultrasound-based navigation in laparoscopic surgery[J].IEEE Transactions on Medical Imaging,2008,27(2):255 -270.
[5]Marie-Ange J,Louis-GillesD,Marie-HélèneRC,etal.Performance evaluation ofa medicalrobotic 3D-ultrasound imaging system[J].Medical Image Analysis,2008,12(3):275-290.
[6]Boctor E,Viswanathan A,Choti M,et al.A novel closed form solution for ultrasound calibration[C]//IEEE International Symposium on Biomedical Imaging:Nano to Macro.Arlington:IEEE,2004:527- 530.
[7]罗杨宇,徐静,鲁通,等.基于磁定位器的手动三维超声图像标定[J].中国生物医学工程学报,2008,27(2):250-254.
[8]Prager RW,Rohling RN,Gee AH,et al.Rapid calibration for 3-D freehand ultrasound[J].Ultrasound in Medicine & Biology,1998,24(6):855 -869.
[9]Birkfellner W,Watzinger F,Wanschitz F,et al.Systematic distortions in magnetic position digitizers[J].Medical Physics,1998,25(11):2242 -2248.
[10]Mercier L,Langø T,Lindseth F,et al.A review of calibration techniques for freehand 3 - D ultrasound systems[J].Ultrasound in Medicine& Biology,2005,31(4):449-471.
[11]Zhang Zhengyou.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(11):1330 -1334.
