基于CAN总线的船用数字程控交换机的软硬件设计*
2013-11-23
(92236部队 湛江 524002)
1 引言
舰船装备的某型交换机是采用脉冲幅度调制(PAM)的全电子式自动电话交换机,整机笨重且体积较大,抗干扰性能差,功能少,系统设计复杂,整机故障率高,可维护性差,容易受到其他电子设备的干扰,功能单一,但它是舰船内部通信系统的核心设备,其可靠性和稳定性直接影响着舰船的内部指挥通信的质量,为克服该型交换机的缺陷,我们设计新的交换系统来代替它。设计的数字程控交换机选用CAN 总线作为处理器之间的通信总线,为一种小容量交换机,最大容量为128门,适用于中、小型舰艇,与自动电话机配合不仅能提供原有模拟交换机无法达到的良好语音通信频响、良好的抗串音性能,而且在其他大功率电子设备、强电磁干扰设备、大功率广播设备、动力电源设备切换等联动时,系统控制及语音通信性能几乎不受干扰;实践表明,研制的系统在系统抗干扰性能、语音通信质量、可靠性等重要参数、指标上大大优于原有交换机。
2 基于CAN 控制器的程控交换机的整体构成
我们设计的数字程控交换机采用了分布式多处理机控制方式,每个单元模块都有一个高性能的处理机,这样就使各处理机的任务比较单一,负荷量小,因而处理机的稳定性也大幅度提高。模块化的硬件结构,灵活的整机配置,无阻塞的时分交换网络,以及高度模块化的软件结构,这些都使系统具有较高的可靠性及可维护性。系统中各用户单元和中继单元的处理机完成接口电路的实时处理,中央控制单元模块处理机(MPU)实现单元内部及与用户、中继单元之间的协调和调度管理处理;各用户、中继单元与中央控制单元之间采用CAN 总线连接,完成处理机之间的通信。系统组成总体框图如图1所示。
系统中的中央控制单元和每一个用户单元及中继单元都是CAN 网络的一个节点,每个节点都由单片机、CAN 控制器、CAN 收发器来完成其通信部分的功能。如图2所示。单片机主要用于系统的计算及信息处理等功能;CAN控制器主要用于系统的通信;CAN 收发器主要用于增强系统的驱动能力。系统中各单元之间通信的工作原理为:用户单元和中继单元的控制器对本单元各用户回路和中继环路的状态进行扫描检测,将所得数据按照CAN 总线协议标准处理后发送到中央控制单元;中央控制单元接受到其他单元上传的数据,根据系统软件预先设定的控制程序向各单元发送控制命令,由各单元单片机对用户回路或中继环路进行实时控制[1~9]。
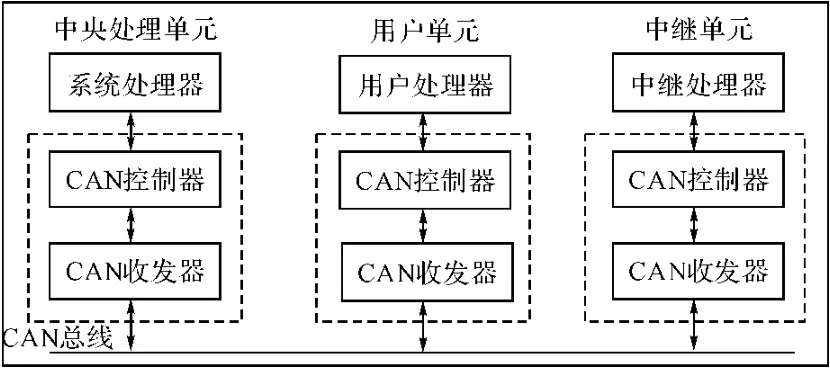
图2 系统通信组成原理图
3 硬件电路设计
3.1 整机控制中心的设计
CPU 板是整机的控制中心。作为整机的中央处理单元,主要完成系统的主处理控制功能、话音的无阻塞数字交换、处理机通信接口等功能;它的功能模块主要有:处理器模块、交换网络、CAN 总线接口、会议和信号音模块、PCM基准时钟模块、4路中继接口、4路双音频收号器和广播接口模块。控制CPU 为高性能的DS80C320处理机[2~4],系统程序存放在EPROM 中,系统参数存放在RAM 中。CAN总线控制器采用PHILIPS公司新生产的既支持CAN2.0B通信协议又支持CAN2.0A通信协议的SJA1000。它与仅支持CAN2.0A通信协议的CAN 控制器PCA82C200在硬、软件上完全兼容。CAN 总线收发器采用PCA82C250,它提供对总线的差动发送和接收能力。
3.2 用户接口板及CAN 总线网络节点的设计
用户接口板功能相对比较简单,从电路的功能上可以分为由89C52单片机构成的处理器部分、CAN 总线接口部分、用户电路部分以及PCM 定时电路部分。用户单元完成数字交换机用户接口电路的“馈电”、“过压保护”、“振铃控制”、“状态检测”、“编译码”、“二/四线变换”及“测试控制”等七种功能。用户电路设计采用Mitel公司MH89625C高集成度专用用户芯片[5],结合其它一些分离元件构成用户接口。中继单元完成2-4线转换,环路状态检测、双音多频接收与发送,系统自动测试链路等功能。这两种单元中的微处理器采用ATMEL公司生产的AT89C52单片机[6],其片内的8K EEPROM 用来存放本单元的控制程序。CAN 总线控制器和CAN 总线收发器仍选用SJA1000 和PCA82C250,控制CAN 总线的数据交换。
系统工作时,用户单元和中继单元的控制程序对本单元中的用户和中继的状态进行不断地扫描[7],并由处理器89C52控制CAN 总线控制器把所得数据发送至CAN 总线,由中央控制单元接收。中央控制单元CAN 总线控制器从CAN 总线接收到所有用户单元及中继单元的状态信息,以中断方式通知CPU—80C320。CPU 收到中断信号后,将数据存入RAM,系统程序对数据进行分析后就可以知道用户回路和中继环路的状态改变,从而对各用户和中继进行相应的处理,并将相应的控制命令通过CAN 总线控制器发送到CAN 总线上。用户单元及中继单元接收到中央控制单元发给本节点的控制命令后,CAN 总线控制器也以中断方式通知处理器89C52,处理器根据控制命令对用户或中继做出相应的控制[8]。
3.3 电源设计
系统的电源全部应用模块化开关电源设计,开关电源具有重量轻、体积小、效率高、稳压精度高等优点。交换机电源由一次电源和二次电源两部分组成。一次电源将交流220V 变换成直流24V,该部分直接采购模块化的开关电源。二次电源将直流24V 转换为+5V、-5V、-48V 以及交流75V、25Hz。其次为了适应舰船设备通常采用交流220V 和直流24V 双电源供电的要求,二次电源还完成交流电源与直流电源之间的不间断自动转换的功能。
4 系统软件设计
遵照软件工程的思想来设计软件系统。采用结构化或模块化设计方法,对系统的需求分析、概念设计、模块设计、代码生成、模块的测试和验收进行合理的划分和组织,以提高软件的生产效率和质量。同时考虑到需求的不确定性,对系统的开发平台和开发工具、系统数据和代码的封装、代码的可重用性、系统模块互连的接口等具体实现细节进行了一系列的规定,使得整个软件系统结构灵活,层次清晰,具有很好的可扩展性和可维护性。
4.1 系统的需求分析
程控交换机程序的任务简单来讲就是完成用户的呼叫处理。一次呼叫的过程一般总是处在某种相对稳定的状态中。只有在发生了某种事件从而产生了某种输入信号以后才促使它必须执行一定的任务和处理,将状态转移到另一个相对稳定的状态中。在稳定状态之间的转移首先是由某种时间触发启动的。在程控交换机来说,事件一般主要有下列几种:
1)由用户发出的信号,诸如摘、挂机,拨号号码信号以及拍叉簧等;
2)由中继线上输入的各种信号;
3)监视定时器的时限到达;
4)处理机之间或程序之间的通信信号到达或数据传递也是产生状态的事件之一。
上述这些类型的事件,都是软件的某种输入信息。系统软件首先进行信息识别,登记受理等初步接受性质的工作,随后进行分析处理,针对输入信息和有关数据,确定可能会转到何种状态以及下一步可能涉及哪些硬件设备。然后是任务执行前处理,即准备必要的硬件资源,拟定下一步的状态,编制各项动作命令。在任务执行前处理后,将有关的动作或写入命令发往有关设备,或者由某种周期程序执行输出。最后在任务执行完后将硬件资源释放,启动定时器进行新的监视计时。
完成上述控制功能的程序由多种执行一定功能的子程序组成,以适应多种不同的处理要求。这些处理要求有的时间性要求严格,有的实时要求不严格,各种任务存在的这种轻重缓急的属性,要求交换机事先对各种程序规定其优先级,然后在运行时,严格按优先级安排任务的执行顺序。为了保证在运行过程中,高优先级任务有可能优先执行,这时系统采用多级中断方式[12]。
4.2 系统的结构组成
舰用数字程控交换机的软件系统具有分层的模块化结构,软件系统主要由端口处理子系统、呼叫处理子系统以及外围终端子系统组成。各软件子系统分布在多处理机中,以系统处理器为中心有机地构成一体,均采用分层、模块化结构进行设计。软件系统中的操作系统采用MCS-51汇编语言编程,各子系统采用PL/M-51高级语言编程。
1)端口处理子系统:主要完成用户电路、中继电路、DTMF接收器、测试电路等接口电路的扫描、信号检测、信号接收和发送以及电路驱动等功能,同时将合法事件报告呼叫处理子系统,接收器处理来自呼叫处理子系统的命令。
2)呼叫处理子系统:该子系统按照有限信息机(FSM Finite State Machine)原理设计实现,根据端口处理子系统送来的端口级事件(用户线、中继、DTMF)进行号码预译和分析、接续路由选择、公共资源分配、向端口处理子系统发送控制命令、以及向外围终端传送呼叫信息等。每个子系统的模块分别完成局内呼叫、出局及特服呼叫、新业务功能等。增加新功能时,可增加新的模块,而不影响其他模块。各个模块在一个实时、多任务操作系统的控制、调度下完成呼叫处理功能。该子系统具有与端口处理子系统和外围终端子系统的接口。
3)外围终端子系统:包含话务台、数据维护、系统测试与监视等若干模块。用户数据的各种修改可在不影响呼叫接续的情况下,通过人机界面输入信息,经过编程话机传递给交换机。
5 结语
详细阐述了基于CAN 总线的船用数字程控交换机系统的软硬件设计:程控交换机的整体构成、硬件电路设计、系统软件设计。该系统将CAN 总线应用于船用数字式程控交换机,开辟了CAN 总线应用的新领域。该系统已形成产品,经过一系列的调试和改善后,交换机运行稳定,各项技术指标均达到预定目标。因此,本文所提出的程控交换机设计方案能很好地满足舰船的使用要求。
[1]邬宽明.CAN 总线原理和应用系统设计[M].北京航空航天大学出版社,1996:6-10.
[2]姚应俊.数字程控电话交换机原理与使用[M].人民邮电出版社,1994:13-19.
[3]胡汉才.单片机原理及其接口技术[M].清华大学出版社,1996:12-15.
[4]陈力钧,刘英.单片机高级程序设计语言PL/M-51与PL/M-96[M].西安电子科技大学出版社,1994:54-60.
[5]MITEL Semiconductor Microelectronics Digital/analog Communications Handbook 1993:3-5.
[6]MITEL Semiconductor Analog/Digital TELECOM Components,1997:4-7.
[7]MITEL Semiconductor Digital SWITCHING&NETWOKING Components,1997:2-5.
[8]刘艳强,马秋霞,王健.CAN 总线通讯的电磁兼容性能分析与设计[J].电子技术应用,2006,8:77-79.
[9]姜海鹏,周玉杰.高性能CAN 适配器的设计与实现[J].电子技术应用,2006,10:72-74.
[10]吴鹏,吴军民,黄在朝.一种用于工业以太网交换机的GOOSE报文优先转发方法[J].计算机与数字工程,2012(10).
[11]李清平.路由器和三层交换机联合实现扩展ACL[J].计算机与数字工程,2010(5).
[12]杨捷,姚晓东,郑海珍.CAN 总线中非周期信息的随机动态优先级调度[J].电子技术应用,2007,2:18-20.