北斗导航系统多轨道卫星星座分析与设计*
2013-11-23
(92941部队 葫芦岛 125001)
1 引言
我国第二代卫星导航系统—“北斗二代”卫星导航系统的研制已经进入组网高峰期。由于北斗二代正在建设中,相关文章和资料比较少,进行北斗二代的星座设计具有重要意义。
从本质上说,所有的导航星座设计研究都针对一个共同的问题,即几何排列问题。这对定位精度至关重要。如何使“北斗二代”星座达到最佳几何排列,即保证地面上的任何点在某个最小仰角之上至少能够看到四颗卫星。使得在卫星不在轨的条件下为北斗二代卫星导航系统的地面系统研制、建设和测试提供一个可靠、易用的仿真和测试环境[1]。
星座设计的主要内容包括:星座类型、轨道高度的选择及轨道参数的设计与优化。本文将对所设计的星座进行GDOP值[2]和可见星数目进行仿真分析,选择星座参数,设计出适合我国导航定位需求的GEO+MEO 星座构型,在此基础上增加一个倾斜地球同步轨道卫星星座[3]扩充成一个GEO+MEO+IGSO 的全球卫星导航系统。
2 Walker星座理论
星座设计的第一步是确定星座的几何结构即所有导航卫星在空间的拓扑结构,使之能够最佳地完成所要求的任务。Walker提出了一系列的星座,有δ星座、σ星座、w星座、玫瑰星座等。其中δ星座得到广泛应用,通常称为Walker-δ星座[4~5]。
Walker-δ星座以各条轨道对参考平面有相同的倾角,以及节点按等间隔均匀分布为特征。如图1所示,为有三个轨道面的δ星座[6]。
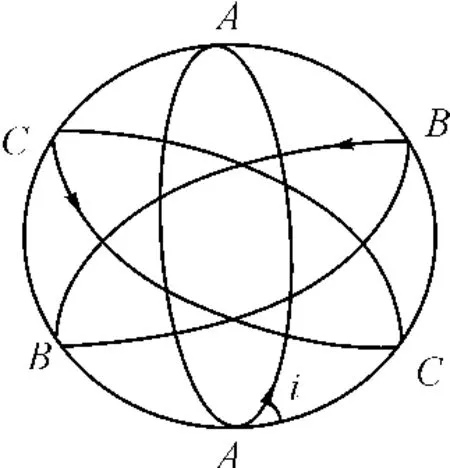
图1 δ星座
设δ星座有P个轨道面,它们对参考平面(通常为赤道平面)的倾角都等于i,每条轨道的升交点以等间隔2π/P均匀分布,每条轨道上有S颗卫星,按等间隔2π/S均匀分布,则相邻平面的对应序号的卫星之间的相位差为[6]
其中,F=0,1…,P-1。任一条轨道上的一颗卫星经过它的升交点时,相邻的东侧轨道上的对应卫星已经越过它自己的升交点,并覆盖了Δu的地心角。N是δ星座的卫星总数,即N=PS,F是在不同轨道面内的卫星相对位置的量纲为1的量,称为相位因子,它可以是从0~P-1的任何整数。
δ星座可以用三个参数N、P和F来描述。再加上轨道面倾角i,则完全确定了δ星座,它们与卫星高度h,倾角i一起称之为构型参数。
记Walker星座各轨道面的升交点赤经为Ω1,Ω2,…,Ωp,轨道面内各卫星的相位角为uj1,uj2…,ujs,这里j=1,2,…p表示轨道平面。N,P,F之间存在相互制约的关系,P取值范围随着N的变化而变化,F的取值范围随着P的变化而变化。
3 星座分析与设计
3.1 卫星轨道高度的选择
卫星运行周期与轨道高度有关,根据开普勒定理,圆形轨道卫星高度h与运行周期Ts满足以下关系式[7]:

其中μ为开普勒常数,R为地球半径。
对中轨道卫星而言,一般选择回归轨道,即卫星的星下点轨迹每日重复,因此星座的覆盖特性以日为周期,在每天的一个时间段里通过某个固定的周期,有利于对固定区域的覆盖。可供选择的轨道高度有20183km,13929km 和10355km 等几种不同的轨道高度。对应的周期大约为8h、6h和4.8h等。如果Te表示一个恒星日时间,Ts表示一个卫星运行的周期,那么有下式成立:

其中N为正整数,表示卫星在一个恒星日内围绕地球运转的圈数。根据式(2)和式(3),列出h和N的对应关系如表1所示。
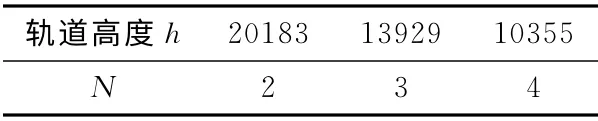
表1 轨道高度与运行周期的关系
在将地球展开成一个平面的地理图上,回归轨道卫星的星下点轨迹曲线在一个恒星日内的段数为n-1。因为是回归周期,在一个恒星日,地球自转一周,卫星绕地球转n周。当卫星高度为20183km 时,卫星每天运行两周;当卫星高度为13929km 时,卫星每天围绕地球运行三周;当卫星轨道高度为10355km 时,卫星每天运行四周。卫星轨道高度影响到星座覆盖的性能,轨道越高,卫星覆盖的范围越大,所以本文选用的轨道高度为20183km。
3.2 GEO+MEO 星座构型
正在建设的“北斗二代”卫星导航系统将由5颗静止轨道卫星(GEO)和30颗非静止轨道(MEO)和倾斜地球同步圆轨道(IGSO)卫星组成[8]。
本文首先研究一个含有21颗中轨与5颗静止卫星的26颗的多轨道卫星星座即GEO+MEO 星座构型。选取中国境内的5个观测点A(85.00°E,36.15°N)、B(76.00°E,42.14°N)、C(110.00°E,17.38°N)、D(118.00°E,23.15°N)、E(129.00°E,5.00°N)、进行一日的观测,每隔一个小时观测一次,根据GDOP值的大小和可见星数的仿真来选择星座参数。
由于北斗二代导航系统的最终目的是建立全球导航系统,因此中轨道卫星的星座采用Walker-δ星座,初始给定采用3个轨道,每个轨道面上有7颗卫星。第一个卫星轨道面的升交点赤经Ω0=110°,第一个轨道上的第一颗卫星的初始相位为0,相位因子F取为2,卫星高度为h=20183km,轨道倾角为60°。
通过改变各星座参数,可以得出中轨道卫星星座的最优参数如表2所示[9]。

表2 优化后的星座参数
为了继续提升星座性能或继续扩展任务目标区域,实现全球导航功能,在GEO+MEO 星座构型基础上增加一个高轨道卫星星座,扩充成一个全球导航系统。为了节省燃料,一般不会进行轨道面的调整,只进行相位重构。本文采用由九颗倾斜圆轨道地球同步IGSO 卫星组成的导航星座方案[12],星座模型如图2所示。
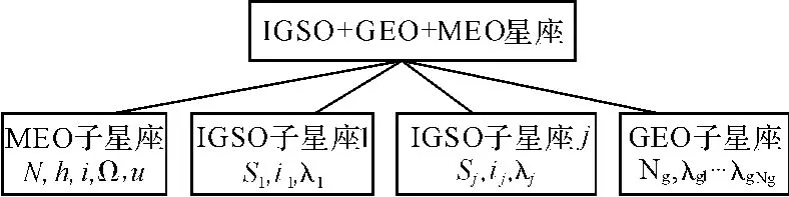
图2 GEO+MEO+IGSO 星座构型描述模型
采用Walk星座,三个轨道面,每个轨道上分布三颗IGSO 卫星,按前面中轨道星座设计分析方法来确定高轨道星座的参数,取相位因子F为2,交点赤经Ω0=30°,ω0=0°。
由于GEO+MEO 的星座主要覆盖中低纬度地区,对高纬度地区覆盖效果较差,因此IGSO 星座的设计应该考虑对高纬度地区的覆盖情况,轨道倾角大,对高纬度地区覆盖效果比较好。
本文通过改变IGSO 卫星轨道倾角来进行北斗二代导航系统对全球的可见星数和GDOP 值的仿真,通过仿真结果分析确定轨道的倾角。分别改变倾角进行仿真,下面给出倾角分别为55°、60°、65°和70°的仿真结果如表3所示。
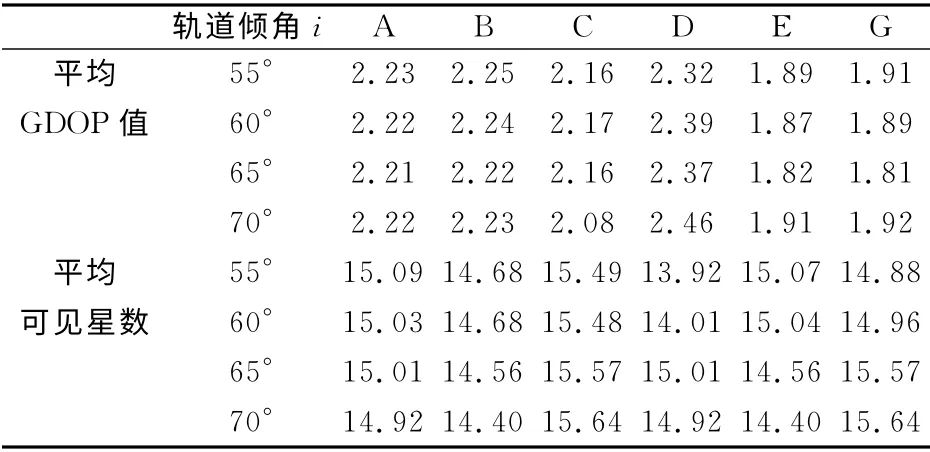
表3 变轨道倾角i的平均GDOP值和可见星仿真数据
由表3可以看出65°的情况下星座的拓扑结构最佳,基本上可以保证全球的平均GDOP 相对较小,平均可见星数较多,且都大于14颗。
4 结语
在GEO+MEO 星座构型基础上增加一个IGSO 星座,进行全球GDOP和可见星仿真,选择IGSO 星座参数,所设计的北斗二代导航系统可基本上满足区域及全球导航定位的需要。星座设计是个复杂的系统工程,不但要进行理论上的分析、设计和优化,还必须考虑实际工程上全部系统的费用、业务的可行性、卫星的可靠性等。
[1]杨俊,武奇生.GPS基本原理及其Matlab仿真[M].西安:西安电子科技大学出版社,2006:80-80;82-83.
[2]陈军,潘高峰等译.GPS软件接收机基础[M].北京:电子工业出版社,2005:20-21.
[3]高长生,荆武兴.同地迹八颗IGSO 卫星区域导航星座分析[J].哈尔滨工业大学学报,2007:7(39):1036-1039.
[4]walker JG.Some Circular Orbit Patterns providing Continuous Whole Earth Coverage[J].Journal of the British Interplanetary Society,1971:24:369-384.
[5]walker JG.Continuous Whole Earth Coverage by Circular Orbit Satellites[R].Royal Aircraft Establishment,Farnborough(UK),TR 77044,March 1997.
[6]张育林,范丽.卫星星座理论与设计[M].北京:科学出版社,2008:39-43.
[7]付锋.局域卫星导航系统的星座设计[D].南京:南京航空航天大学,2001.
[8]未来发展和北斗二号[DB/OL].维基百科.http://www.navchina.com/Article_new.asp?ArticleID=528.20085.5.
[9]马长李.北斗卫星及其与捷联惯导组合导航系统研究[D].烟台:海军航空工程学院,2009.
[10]戴邵武,马长里,廖剑.“北斗一代”导航定位系统分析与研究[J].计算机与数字工程,2010(3).
[11]梁向阳,张彬.一种改进的组合卫星定位系统的研究[J].计算机与数字工程,2012(12).
[12]杜宇铃,张学军,张军.一种新的中国区域导航系统星座方案的探讨[J].计算机仿真,2007,2(24):49-53.