一种水声目标信号模拟器设计*
2013-11-23
(1.海装采购中心 北京 100071)(2.海军92474部队 三亚 572018)
1 引言
国内研制和交付装备时,需要安排大量的(湖)海试验,对装备的声系统及总体性能进行有效的评估和检验。试验需要大量人力、物力和财力,并且试验周期长,受海况、气候等影响因素多,试验次数也有限,而陆上半实物仿真系统相对于湖试或海试不但能够节省大量的人力和物力,而且能够提供科研、生产和使用过程中的系统测试。
采用水声目标模拟器可以实现在陆上实验室条件下,构成对装备声系统的海上试验开发环境,因此本文设计了一种水声目标信号模拟器,可用于在陆上条件下对装备声系统性能进行有效的测试。
2 系统组成和工作原理
目标模拟器原理框图如图1所示。系统包括波形回放模块、功率放大、阻抗匹配、声对接装置等部分组成。其中声对接装置包括四个对接换能器、匹配材料和机械安装及加固装置。其原理为:主动工作方式下,系统启动后,目标模拟计算机设定目标特性和装备状态,目标模拟计算机根据设定的值计算四路回波的延时、频移和衰减值,同时根据主动信号形式和延时、频移、衰减值以及信噪比等参数计算得到回波的数值模拟。将四路目标回波数据通过数字I/O模块写入波形回放模块,并同时设置回放频率、四路延时值和信号衰减分贝数,系统开始工作,当目标模拟计算机接收到声系统给出的同步信号后,给波形回放模块发送一个启动信号,波形回放模块经过一定延时后,产生四路一定强度、相互之间具有一定延时的目标回波模拟信号,信号经过功率放大、阻抗匹配后送入四个对接换能器,此时电信号转换成声信号,声信号经过匹配材料到达声系统的换能器,装备声纳系统接收目标噪声信号,经过分析和处理,得到目标的方位和距离信息,从而对装备进行控制。主动工作方式下的仿真系统工作框图如图2所示。

图1 仿真系统原理框图
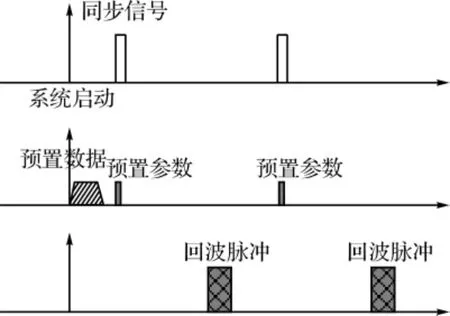
图2 主动工作方式下的仿真系统工作框图
被动工作方式下,系统启动后,目标模拟计算机设定目标特性和装备状态,目标模拟计算机根据设定的值选择需要的目标噪声数据,将四路目标噪声数据通过数字I/O 模块写入波形回放模块,系统开始工作,当目标模拟计算机接收到声系统给出的同步信号后,给波形回放模块设置回放频率、四路延时值和信号衰减分贝数,并给波形回放模块发送一个启动信号,波形回放模块产生四路不同强度、相互之间具有一定延时的目标噪声信号,信号经过功率放大、阻抗匹配后送入四个对接换能器,此时电信号转换成声信号,声信号经过匹配材料到达装备声系统的换能器,装备声纳系统接收目标噪声信号,经过分析和处理,得到目标的方位信息,从而对装备进行控制。被动工作方式下的仿真系统工作框图如图3所示。
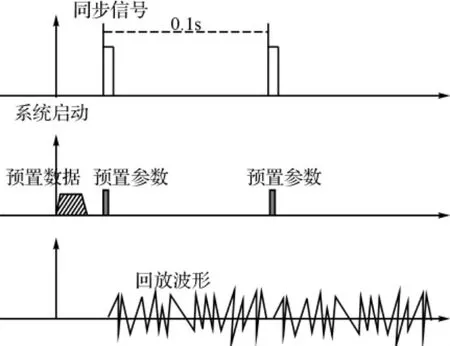
图3 被动工作方式下的仿真系统工作框图
3 波形回放模块设计
自主研发波形回放模块的原理框图如图4所示,包括逻辑控制电路[1~2]、存储器、DDS电路[2]、D/A 电路[2]和衰减电路[2]。

图4 波形回放模块的原理框图
3.1 CPLD 设计
在波形回放模块的设计中,CPLD 是实现接口数据传输的关键器件。CPLD 一方面与数字I/O 模块连接,接收波形数据和相关参数,如回放频率,衰减分贝数和各路延时值。另一方面与模块的其它功能实现电路相互联接。这其中包括各芯片的片选信号,DDS电路输出信号,目标噪声数据,SRAM 的地址和控制信号,D/A转换时钟信号,AD9850和AD7111的控制字数据等。CPLD 芯片采用Al-tera公司生产的EPM1270,内部逻辑设计采用硬件描述语言VHDL编程。
3.2 DDS电路
采用DDS电路,目的在于产生精确的时钟信号,将时钟信号经过CPLD 处理后产生存储器地址和相应的控制信号,同时还作为D/A 时钟送入D/A 芯片,在众多的DDS器件中,我们选用美国AD 公司的AD9850 芯片,AD9850 是高稳定度的直接数字频率合成器件,内部包含有输入寄存器、数据寄存器、数字合成器(DDS)、10位高速D/A 转换器和高速比较器。AD9850高速的直接数字合成器(DDS)核心根据设定的32位频率控制字和5位相移控制字,可产生0.029Hz到62.5MHz的正弦波信号和标准的方波信号。该器件提供了并行和串行控制字输入,可通过并行接口或串行接口实现控制字的定入,以改变其输出频率和相位。本设计通过CPLD 对AD9850进行并行配制。
3.3 存储器
在本系统中对存储器的要求主要有存储容量较大(2M字节),存取速度较快,同时要求操作简便,综合考虑多种存储器的特性,如Flash 存储器虽然容量较大,但存取较复杂,且存在读写次数的限制,因此不适合本设计的要求。动态RAM 存储器容量也较大,但是存在刷新问题,FIFO 操作简单,但容量有限。静态RAM 容量可以比FIFO 大,比Flash存储器和动态RAM 小,但是操作较简单,存取速度快,因此综合考虑多种因素,决定采用四片静态RAM 作为本设计中的存储器。本设计采用SRAM 的型号为IS62WV 20488BLL。这种型号的SRAM 存储时间短,仅需25ns,完全的静态操作,不需要时钟和动态更新。存储容量达到2M字节,采用单电源3.3V 供电,并且读写操作简便。
3.4 DA 转换及程控衰减
从存储器中读取的数字信号要进行D/A 转换成模拟信号。为了模拟不同的回波,还应当按测试需要对该信号进行程控衰减。D/A 转换是信号处理的重要组成部分。本系统中采用了AD9709芯片实现D/A 转换功能。
AD9709是美国AD 公司生产的一种双路8位CMOS D/A 转换器,具有高达125M 的D/A 转换速率,功耗低,操作方便的优点。整个系统只需要两片AD9709即可将四路数字信号转换为模拟信号。由于AD9709 为电流型输出,所以在输出端将信号与运放AD843组合即可实现转换过程。
本系统中的程控衰减器件采用了AD7111。AD7111的主要特性有:0~85dB 大范围衰减;衰减步长0.375dB。控制字通过CPLD 进行配制。
3.5 PCB设计
对于高速、高精度波形回放模块,PCB的布局布线是一个很重要的问题。在系统中如何避免各个信号之间的串扰、如何保证信号的完整性是整个系统正常工作的保障。PCB走线采用65Ω 的阻抗控制。
本模块采用6层板,其目的并不仅仅是为了走线的方便,更重要的是使用了大面积的电源和地之后可以使各信号线与地或电源之间形成一个紧耦合从而减少信号线之间的串扰。其次,系统的整体的布局要合理,应综合考虑地层和电源层的分割,使用相同电源、地的芯片尽量放在一起以避免平面被割琐碎,模拟地和数字地要隔离,最后通过0Ω的电阻连在一起。
4 功放与匹配电路设计
功放与匹配的作用是完成目标噪声信号的功率放大,同时与对接换能器的阻抗匹配及长线传输匹配。
功率放大器是向负载(换能器)提供功率信号的装置,它接收来波形回放模块输出的鱼雷噪声信号,对信号进行功率放大后输出到阻抗匹配电路。在本系统中使用甲乙类放大器的功放管,同时采用推挽放大方式。
功率源与换能器的阻抗匹配有两个问题要解决,一是调谐,即采用外加电抗性元件调节换能器的输入电抗,使输入相角趋近于零,以减少功率传输中的无功分量。二是变阻,即改变换能器的有功电阻,使之与发射机(功放)的输出阻抗相接近,以达到最佳功率传输匹配。本设计采用变压器进行匹配,即通过初次级线圈之间的变压及耦合作用匹配。同时变压器还具有隔离作用。
5 声对接装置
声对接装置[6~7]完成的主要功能是:把目标模拟器电子系统产生的信息,通过声对接装置的对接换能器基阵转换成声信号,正确地耦合到装备声系统的换能器上,形成声系统的工作环境。声对接装置主要由对接换能器、模拟海水的阻抗匹配材料和固定加压耦合部件组成。声对接装置在技术上必须保证以下要求:
1)保证对接换能器与声系统上的接收换能器之间的相互准确定位。
2)保证对接换能器的声发射面与声系统上的接收换能器的接收面之间有一定值的均匀压力分布,使声信号耦合处于最佳状态。
3)对接装置应结构简单紧凑,实际使用中安装、拆卸方便。
4)匹配材料应保证无气泡和杂质,满足阻抗匹配要求。
5)对接换能器采用PZT-4发射型压电陶瓷材料,发射与接收带宽满足系统的工作要求,发射响应在带宽内较平坦。
6 系统主要技术指标
6.1 存储器部分
1)存储容量:2M×4字节;
2)存取速度:25ns;
3)工作电压:3.3V。
6.2 DA 部分
1)DA 转换通道4路;
2)DA 的转换分辨率为8bits;
3)DA 转换率最大可达到10Msa/s;
4)DA 的输出最大幅值为±8V。
6.3 衰减部分
1)衰减范围为0~85dB大范围衰减;
2)衰减步长0.375dB。
6.4 可靠性
系统可靠性、可维修性要求满足有关国军标规定,指标如下:
MTBF>500小时;
MTTR<0.5小时。
7 结语
本文设计的水声目标信号模拟器经试验验证,已达到预定的指标,并已成功应用于装备声系统的测试,由于系统采用声对接方式,与装备之间没有任何电连接,不会对装备产生任何不良影响,并且可以模拟真实的水声环境,因此可以广泛应用于声纳设备和其他设备的检测,有较大的实用价值和广阔的应用前景。
[1]钱国平,马怀俭.基于PXI总线的数据采集模块设计[J]哈尔滨理工大学学报,2003,8(6):61-64.
[2]黄雄飞,苑秉成,等.基于PXI的高速信号采集和回放模块设计[J].仪器仪表学报,2006,27(12A):22-25.
[3]杨文君,林伟.基于DSP5402的雷达测速系统硬件、软件设计[J].计算机与数字工程,2012,40(5).
[4]刘帅,曹成俊,李志强.PXI总线技术在虚拟仪器中的应用[J].计算机与数字工程,2008,36(8).
[5]徐钦赟,杨国斌,丁晖.基于PXI总线DSP系统的设计[J].计算机与数字工程,2009,37(7).
[6]黄雄飞,苑秉成,等.声学多普勒速度仪陆上仿真方法研究及其实现[J].系统仿真学报2007,19(14):3354-3357.
[7]黄雄飞,苑秉成,等.相控阵多普勒计程仪半实物仿真方法研究及其实现[J].武汉理工大学学报(交通科学与工程版),2011,35(5):1063-1066.
