水声设备动态定位精度测试方法研究*
2013-11-23
(1.92213部队 湛江 524022)(2.91388部队 湛江 524022)
1 引言
对水声测控设备而言,水下定位精度是最重要的技术指标之一,它直接影响试验中弹道参数测量结果的可信度,是影响试验结果有效性评估的重要参数。在海洋环境下,水声设备对目标的定位测量精度一直比较难检定,主要原因为:1)水声定位的测量精度受到水声环境许多不确定因素的影响;2)海洋动态环境下难以提供运动目标位置标定的有效手段和方法。对水声跟踪设备目标动态定位精度检验方法研究是很必要的。
2 测量原理和方案
水声测控设备动态精度检测的关键在于对目标运动发出声源信息位置的精确测量,各水声测控设备同步对目标进行定位解算,通过数据分析测定各测控设备的动态定位精度。潜艇在潜望时可以用GPS 定位测量,通过事后处理提高定位精度;鱼雷可以利用其内测数据,经过组合技术处理、运动设计提高精度。
只要能准确测量目标声头(声源)位置,即可实现系统校正,简易方案如下:在试验船上安装声头,发射同步声脉冲,利用高精度DGPS和航姿测量系统准确测量声头的准确位置。系统构成如图1。
声头精确位置计算方法为:假定天线到声头的高为H,天线高斯坐标为(X,Y),设载体姿态测量的航向角、俯仰角和横滚角分别为ψ、θ和γ,则姿态方向余弦转换矩阵为

图1 系统构成原理图
其中:

位置修正公式为

声头精确高斯位置为

该方法组成简单,使用方便,只需研制便于安装的声头即可。声头位置在水线下3~6m,位于声表面层上,由于等温效应和虚源效应的影响,和实际声测量的情况不一致(实际声头一般在跃变层以下),所以其测量的结果不能反映声设备实际测量潜艇鱼雷等运动目标的情况。同时该方法对声被动跟踪测量系统更是无能为力。所以标校声设备定位精度最好利用潜艇、鱼雷等真实目标,准确测量其运动轨迹。
由于潜艇在潜望状态航行时其艇上GPS接收机可以测量位置,声源一般安装在发射管中的雷上(水声被动测量时声源在螺旋桨附近),在潜望状态下,声源深度大约15m。在艇上安装高精度姿态测量设备,可以准确推算艇上声头每一时刻的位置、鱼雷发射的起始点位置、姿态,从而可以利用鱼雷姿态、加速度测量设备准确推算鱼雷位置。测量设备构成如图2、图3。

图2 潜艇测量设备示意图

图3 鱼雷测量示意图
测量设备包括:利用潜艇的GPS接收天线接收GPS信号,用GPS OEM 解算模块测量卫星伪距、潜艇位置,并记录和存储,测量船上同步测量卫星伪距、差分修正数以修正目标位置;结合光纤陀螺实时推算潜艇声源的准确位置;鱼雷发射后,记录发射时刻、位置,利用惯导组合导航技术推算鱼雷的位置。经过事后处理确保目标测位精度在5m 以内。水声设备同步测量目标、鱼雷位置,声线声速仪同步测量声速梯度,通过数据处理比对,得到声测量设备的精度。
整个工作流程如下:潜艇在潜望状态航行,GPS测量潜艇位置,测量船上同步测量GPS差分数据,用于事后计算潜艇的准确位置;光纤陀螺配合测量计算潜艇声源的准确位置,水声设备同步测量潜艇位置。至此完成在水下低速条件下对水声设备标校的测量工作。潜艇发射鱼雷,记下发射的起始时刻、点位、姿态,鱼雷设定为直航,由内计仪系统计算目标位置,经过数学方法处理,确定鱼雷的准确位置,由于目标的运动方式简单,得到的测量精度较高。声学设备同步测量鱼雷位置,对测量结果进行处理、比对,可以得到水声测量系统的定位精度。测量设备包括艇上新装或研制GPS接收机1台,差分接收机1 台,鱼雷内计数据录取系统1套,光纤陀螺1个,声速测量仪1套。
各设备作用如下:GPS接收机、差分接收机:用于目标大地坐标的准确测量;光纤陀螺:用于配合测量计算目标声源的准确位置;鱼雷内计数据录取系统:用于内计测量鱼雷的运动轨迹;声速测量仪:用于测量海区的声速情况,确定声源位置能否满足测试的要求。
3 潜艇天线、声源位置的准确测量方法
在测量船上测量GPS定位的位置、伪距修正数,潜艇在潜望状态通过GPS,得到位置、伪距参数,并为光纤陀螺提供误差修正,用组合导航模式计算潜艇声源的位置。
3.1 GPS的精确测量
采用伪距差分技术。通过在基准站上利用已知坐标求出测站至卫星的距离,并将其与含有误差的测量距离比较,然后利用α-β滤波器将此差值滤波并求出偏差,将所有卫星的测距误差传输给用户,用户利用此测距误差来修正测量的伪距,从而求出自身的坐标。如果基准站、用户站均观测了相同的4颗或4颗以上的卫星,即可实现用户站的定位。伪距差分原理:
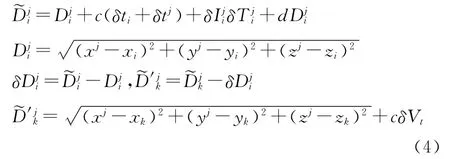
由于伪距差分可提供单颗卫星的距离改正数δDi,因此用户站可选其中任意4颗相同卫星的伪距改正数进行改正,而不必要求两站观测的卫星完全相同,且伪距改正数是直接在WGS-84坐标系上进行的,是一种直接改正数,定位精度更高,且使用更方便。由于伪距差分定位依赖于两站公共误差的抵消来提高定位精度,误差抵消的程度决定了精度的高低。误差的公共性在很大程度依赖于两站距离,随着两站距离的增加及卫星的高度角、天线的指向性及高程差异,其误差公共性逐渐减弱,特别是潜艇天线高程较低时,这种差异性随目标离基准站的距离增大而更加明显,伪距差分后的剩余误差将更大。文章采用移动基准站的方案,即利用星站差分技术确定测量船接收机的准确位置,测量精度可以达到15cm,再由接收机伪距和位置确定卫星伪距修正数,选取和潜艇接收机一致的卫星进行伪距修正定位,因测量船和潜艇距离在10km 以内,定位结果有高度的相似性,从而得到精确位置,其测量误差为位置误差和伪距码误差的叠加,可达75cm。

图4 测量船GPS修正数据生成部分
3.2 利用GPS组合导航算法计算声源位置
利用光纤陀螺测量载体的姿态,设载体的航向角、俯仰角和横滚角分别为ψ、θ和γ,则载体坐标系与地理坐标系的姿态阵为C(见式(2)),即声头在载体的坐标增量为

声头在高斯坐标下的位置为

其中(X0,Y0,Z0)为修正后的GPS 天线准确高斯坐标,(ΔX,ΔY,ΔZ)为声源在潜艇上的坐标。
4 纯内计仪模式下鱼雷位置测量方法
由于目标在水下运动受水流等因素影响会引起位置偏差,直航模式、航向与水流方向一致时影响最小,这种影响可以通过组合系统测量,在直航模式下目标运动的角度增量很小,考虑数据处理的简易性、测量实施的简便性,设计潜艇、鱼雷为直航方式。
现代鱼雷装有高精度陀螺系和加速度计,可以较准确推算鱼雷位置,需要已知鱼雷的起始位置和校准航向,并最大限度减少鱼雷运动的复杂度,以减小因速度控制等因素带来的附加误差。当潜艇发射鱼雷时,记录发射时刻、位置、姿态,鱼雷直航,鱼雷内记仪记录鱼雷的运动状态,进行数据处理,由起始点推算鱼雷准确位置,鱼雷和潜艇运动态势如图5。下面利用内置于鱼雷的导航系统解算鱼雷的位置。

图5 鱼雷和潜艇运动轨迹设计图
4.1 鱼雷内计仪组成及其数学平台

图6 小型陀螺捷联系统示意图
现代鱼雷的位置一般由小型陀螺和加速度计构成的捷联导航系统推算得到,捷联系统由三维小型陀螺和三个石英加速度计固连于鱼雷三个雷体轴上,如图6所示,三维小型陀螺测量沿雷体轴x1,y1,z1方向的角速度为ωx1、ωy1、ωz1。三个加速度计测量沿雷体轴x1,y1,z1方向的视加速度
捷联系统中小型陀螺输出脉冲数代表雷体在采样时间内的转角增量,若已知雷体的初始参数,并测得各采样时刻雷体的转角增量,则可用数值迭代法求解转动角。设陀螺仪测出雷体从第(k-1)次采样时间到第k次采样时间内的转角增量为
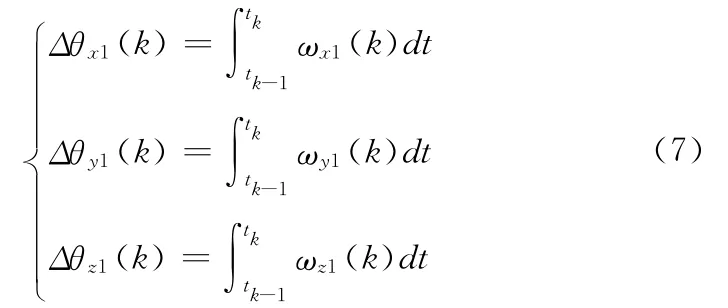
式中Δθx1(k)、Δθy1(k)、Δθz1(k)分别为从第k-1 次到第k次采样时间内雷体绕三个坐标轴的转角增量;tk-1为第k-1次采样时的时间;tk为第k次采样时的时间(k=1,2,3,…);根据转角增量及初始角即可计算目标的姿态。
4.2 小型陀螺捷联导航方程
由图6可知,三个扰性加速度计测出沿雷体轴的三个视加速度分量,则可求出在惯性系的视加速度,即:则鱼雷的运动方程为
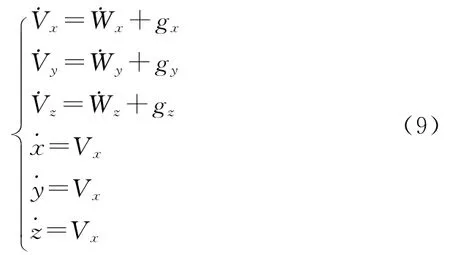

可得雷体的实时位置和速度的差分方程解如下:

式中gx、gy、gz为考虑J2项摄动的重(浮)力项在惯性坐标系三个方向上的分量。根据上式可计算目标各时刻的位置和速度。
4.3 小型陀螺及加速度计的误差模型
4.3.1 捷联系统陀螺的误差模型
4.3.2 石英加速度计的误差模型

4.4 数值仿真
取计算步长为100ms,用捷联惯性器件误差模型计算各项误差,假定陀螺漂移为0.05°/6h,初始位置误差为1m,初始航向误差为0.010,加速度计随机误差为0.005g,安装误差即安装方向的不一致性引起的误差可以在岸上综合补偿消除,灵敏度为0.002g,由于总航行时间为4min,航向设定为直航,各种漂移和误差不可控因素减低到最少,鱼雷运行正常,其计算位置完全为目标位置,经仿真总体测量误差不大于5m。
5 声测量设备定位精度计算
5.1 数据的线性拟合
首先进行声传输速度差异的修正,GPS测量和内计仪推算的是t时刻的目标位置,声设备测量的是t-Δt时刻的目标发出的信号或噪声,对其进行修正得到同时刻的测量数据。假设鱼雷航路设计成直线,在航行的稳定段,为匀速直线航行。令

可以利用此特性对所有测量数据进行最小二乘直线拟合,得到目标运动测量中心线的无偏估计。为使相邻直线首尾相接,k为待定系数,根据最小二乘原理,应使Q=为最小。令dQ/dk=0,得

式中,k值确定直线的斜率,它的大小与n值选取有关,n大,平滑效果好,但信号波形失真大。对鱼雷的运动轨迹进行拟合,得到航行的直线航迹,由于是无偏估计,其总体误差最小。
5.2 测量精度的计算
设声测量设备测量的位置为(Xi,Yi),(Xi0,Yi0)为差分GPS测量和内计仪推算(经最小二乘直线拟合)的t时刻的目标位置,n为计算的点数,则:

按原点矩计算测距精度指标:

整个过程分段计算,潜艇定位段用GPS修正数据计算声测位精度,鱼雷运动段用内计仪数据及雷发射初始点位置计算声测位精度。
6 结语
文章研究了在实际测量条件下水声设备的动态精度标校方法,方法简单实用。利用现有装设备,无须投入大量的设备研制购置经费,方法成功实施后,可以准确检测各种水声主被动跟踪定位设备的海上实际定位精度,为水声设备验收提供必要的技术支撑,提高测量数据的可信度和权威性,更加有利于水声测量设备定位精度的结果评估。
[1]刘利生.外弹道测量数据处理[M].北京:国防工业出版社,2002.
[2]刘利生.轨迹测量设备精度自鉴定技术与评估[M].飞行器测控时报,2000(4).
[3]刘丙申,刘春魁,杜海涛,等.靶场外测设备精度鉴定[M].北京:国防工业出版社,2008.
[4]刘根友,朱才连.任超.GPS相位与伪距联合实时定位算法[J].测绘通报,2001,(10).
[5]刘基余.GPS测量原理[M].武汉:武汉大学出版社,2002年.
[6]高社生,等.GPS/SARS组合导航定位技术[M].西安:西北大学出版社,2006.
[7]J.A.Fessler,A.O.Hero.Penalized maximum-likelihood image reconstruction using space alternating generalized EM algorithm.IEEE Trans[J].On Image Processing,1995,4(10):1417-1429.
[8]顾笑东,邱志明,袁志勇.双基阵声纳系统水下目标被动定位精度分析[J].火力与指挥控制,2011,36(1)147-150.
[9]孙升贤.利用GPS测定罗经差的方法及其精度分析[J].航海技术,2012(3),41-42.
[10]刘大杰,陶本藻.实用测量数据处理方法[M].北京:测绘出版社,2000.
