无人机台风测量系统的设计和应用
2013-11-20党晓军虞玉诚
党晓军,虞玉诚
(水利部发展研究中心,北京 100053)
0 引言
台风测量参数温度、湿度、压力、风速等对利用台风计算模型推演台风的运行轨迹和强度变化有直接的作用。目前我国测量台风的技术手段包括:气象卫星微波遥感技术、风廓线雷达测量、台风高空外围的测量设备投放、自动气象站和移动观测车,卫星和雷达测量不能取得台风内部的温度、气压、风力、湿度等参数,自动投放不能得到位置连续变化的台风参数,自动气象站和移动观测车主要用于陆上的测量。
针对台风测量技术手段存在的缺陷,各国开始探索无人机在气象探测方面的应用。澳大利亚生产的 AEROSONDE 小型长航时气象探测无人机,成功进行了跨越大西洋的飞行,曾为世界卫生组织、NASA、美国海军研究部、澳大利亚气象局、中国台湾气象局、日本和韩国气象研究院提供气象服务。台湾大学和台中央气象局为实施“无人机探空观测台风计划”先后购置8架 AEROSONDE 气象探测飞机,并在“海燕”、“康森”、“龙王”等台风探测中取得成功,在“龙王”台风探测中,飞机成功进入了风眼[1]。
2008年中国大陆首次利用无人机探测手段对台风“海鸥”进行了探测,飞行高度500m,飞行时间近3h,距台风中心最近距离约为100km,获取了探测期间全部气象要素数据(温度、相对湿度、气压和风速),数据获取率达到90% 以上[1]。自 2008年探测台风以来,上海台风研究所经多方调研、选择,选中该型(晨鸟)飞机,作为台风测试的位移候选机型,进行穿越台风的飞行准备工作。由于在山区飞行,地面站没有高程显示,飞机起飞受场地大小限制,因而起飞和控制方式必须改变。2011年以来,针对飞行控制的改变和气象测量系统的交互改进,进行了地面站的带高程轨迹显示、起飞自助模式飞行、台风的切入飞行实验、风速的机上解算等完善研究工作。目前飞机的外形设计和气象测量计算方式已基本稳定。
1 无人机台风测量系统总体设计
无人机台风测量系统运用飞行控制技术,辅助人工干预,结合卫星测量的云图,沿着台风旋转的切线方向,逐渐进入台风中心,进而穿越台风连续采集有关风暴中温度、气压、风力及湿度等数据,并随时更改高度,测量不同连续高度上的台风参数。无人机收集的数据被卫星转发至测量控制中心,控制中心通过通用网络将数据实时传至气象中心,应用于计算机模型制作,以实时解算台风的运行模型。
测量台风主要参数的传感器置于机头、机翼等位置,传感器和测量参数的解算在无人机上完成。
总体设计内容包括:无人机空气动力设计、机身 CAD 设计、气象参数测量和反算、北斗卫星和气象测量参数的融合传输,地面站的遥控显示、发动机节油控制等。
无人机系统主要由飞机平台、航空电子系统、卫星数据链系统、气象探测载荷设备、地面测控站、地面发射装置等组成[2],具体组成如图1所示。
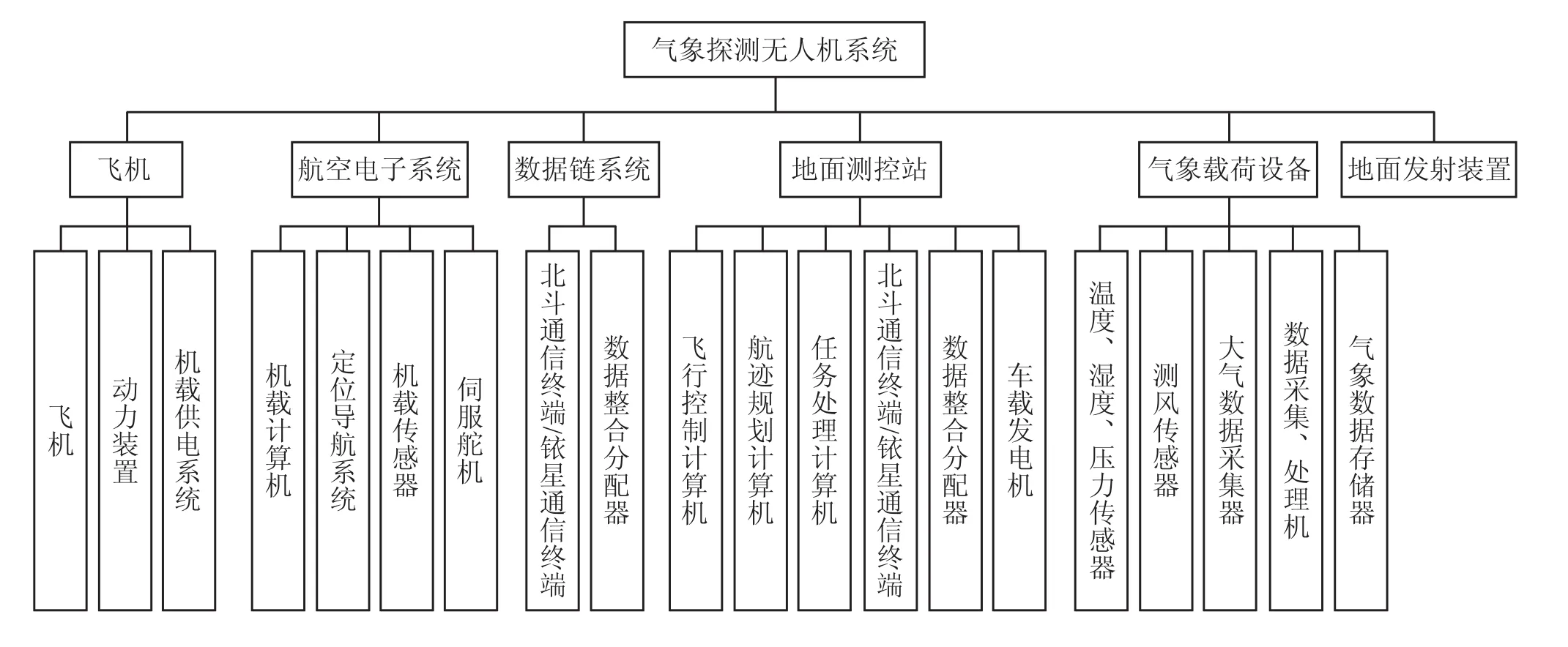
图1 飞机系统组成
1.1 飞机机身和发动机系统
无人机测量台风,首先要有稳定的气动特性,借鉴国外的飞机设计,飞机平台采用倒 V 联动的外形设计;采用复合材料增加抗风性能,减少飞机机身重量,提高搭载载荷能力,提高密闭性,增强抗雨能力;改进发动机,节约耗油,增长航程。
无人机台风测量系统主要由飞行器、发射车、车载地面站3大部分组成,全机长度为 1.75m,高度为 0.71m,机翼展长为 2.90m,最大起飞重量为15kg,实用升限5000m,巡航速度为95km/s,最大航时20h,最大航程为2000km[3],飞行外形结构设计如图2所示。
飞机结构参考国外飞机的设计经验,进行了气动设计,并进行了风洞试验。飞机机身由特别开发的复合材料通过磨具一次成型。
发动机系统采用日本进口发动机,进行了喷油的频率控制设计,保证在满足动力要求的同时,节约用油,延长航时。
1.2 航空电子系统
航空电子系统主要完成飞机飞行姿态控制及飞行任务导航,实时接收地面站控制指令,并将飞机各项数据实时回传地面站[2-3],如图3所示。
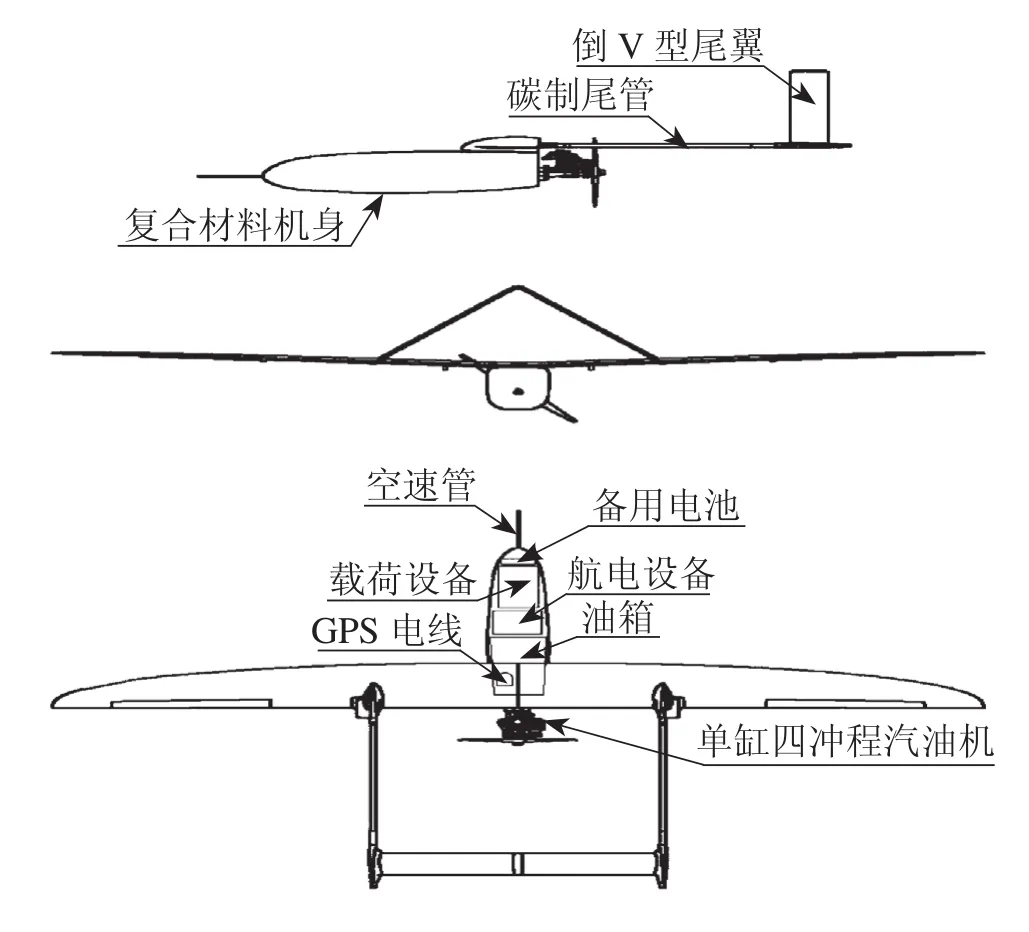
图2 飞机外形结构图
飞行计算机采用 Microchip 公司的 PIC16f877单片机作为主处理芯片,机载数据链路采用 PHILIPS公司的 P89C668单片机为主处理芯片,北斗卫星通信采用30s 的短信服务卡[4-5],基于 PC104嵌入式系统为气象载荷的推算和飞行数据融合主处理机[6]。
地面站采用 VB 和 VC 混合编程方式,支持Googel Earth,Mapinfo 和超图等地图软件[7]。
1.3 气象载荷系统
气象载荷分系统由温度、湿度、气压、风向、风速等传感器,以及数据采集与处理系统组成,如图4所示。
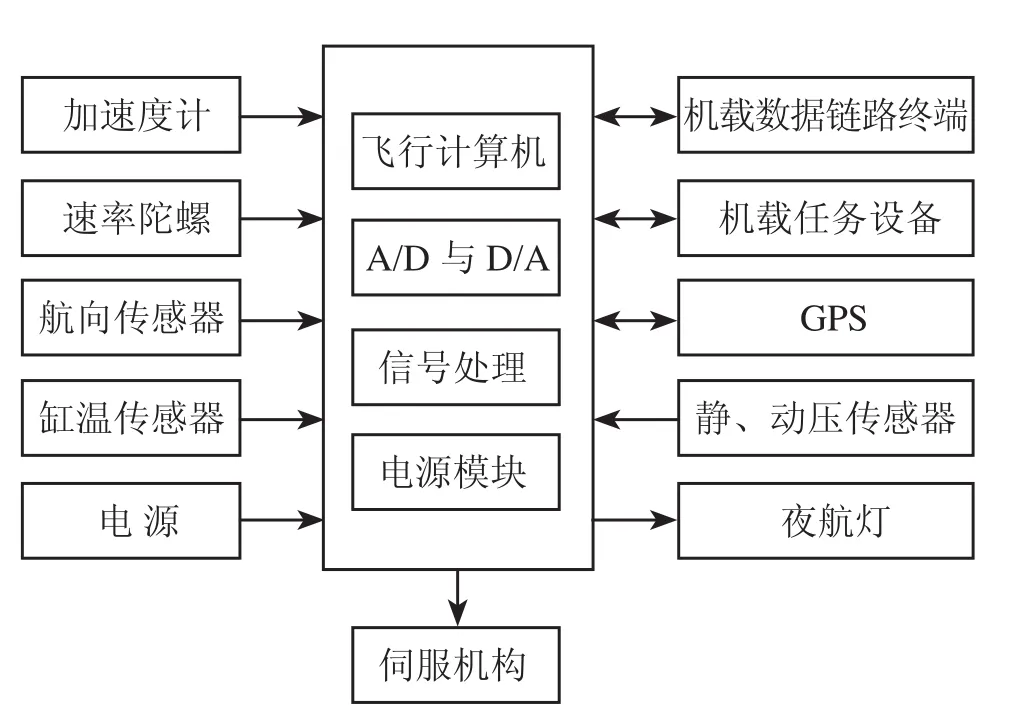
图3 航空电子组成

图4 气象载荷组成
2011年以来针对气象参数的测量,是将天津气象仪器厂研制的气象设备利用基于 Windows 系统的PCl04进行控制,并通过进程间消息传递气象参数给通信程序,由北斗卫星或铱星传回到地面站设备[8]。该气象设备利用 PC104较强的运算能力,在空中实时完成气象参数解算,而且由于 PC104单独控制气象传感器,测量取样的周期大大缩小,采样样本量极大增加。第1次台风测量时,将原始数据按30s周期传到地面,然后进行反算,这样使得采样周期≥30s,减少了数据的样本数量,降低了计算精度。现在正在对北斗卫星的短信传输频率进行改进,以增加测量的样本数,满足当前需要。
地面站串口专门有读写线程,提高数据通信处理能力,以减少数据包丢失现象。
2 无人机飞行模式设计
2.1 起飞
台风测量时,为了跟踪台风运动,方便运输,寻找更合适的起飞切入点,采用车载发射方式,飞机固定在发射车顶部发射架上。当发射车沿跑道逆风行驶,车速达到85km 时,释放紧固,飞机升空而起,按预定的任务规划航线飞向目标区。
2.2 任务执行
无人机起飞后,按预设航路点飞行,飞行过程中可随时更改飞机所设航路点、飞行方向、飞行高度和速度等参数,台风测量中,沿着台风云图给出的台风旋转方向的切线飞行,扰动和阻力小,气流相对平稳,因此飞行应随时调整,以便飞机安全飞抵任务点,安全可靠地进入台风中心;到达任务点后按照设定指令完成各种任务动作,任务载荷将所测数据实时传输回地面站。
2.3 降落
返航降落,可以充分利用台风的逆风场,利用自身重力和速度,保证飞机安全降落。无人机完成任务后按指令返回降落地点,降落采用机腹滑降方式,降落场地可选在公路、平坦土质地面或草地,场地面积7m×200m。飞机返航后操作手控制飞机逆风进入场地,关闭发动机,降低飞机高度,机腹擦滑地面安全着陆。
3 无人机台风测试系统考核试验
3.1 台风探测的要求
无人机具备台风探测的6点要求,具体如下:
1)飞行航时长。无人机采用成熟的双尾撑V型尾翼气动布局,主翼为大展弦比椭圆型机翼,提高了升阻比,降低了发动机的油耗,提高了续航能力,满足环绕台风探测的航时要求。
2)在强对流、降雨的气象条件下飞行稳定。系统采用空速优先自主飞行方案和动力系统防雨技术,确保飞机在强对流、降雨的台风气象条件下控制自如,航线准确,动力平稳。
3)超视距数据传输。使用北斗卫星或铱星通信链路,无人机具备超视距远程数据传输能力,扩展了任务执行范围和数据传输距离。
4)系统操作灵活简便。为方便拆解运输及快速组装,无人机采用车载起飞、机腹滑行着陆方式,起降方便,降低了对起降场地的要求。
5)确保探测精度要求。无人机台风测试系统已实现设备国产化,能确保台风探测的精度要求,基本实现探测、收集、处理、分发一体化和传输准实时化。
6)产品价格低廉。1套无人机台风测试系统价格约70万元,符合台风探测业务化的成本要求。
3.2 考核试验
台风探测无人机参加了由中国气象局大探中心组织的以下考核试验,并顺利通过考核:
1)长航时测试。在河北进行了为期3d 的续航和飞行通信能力测试,进行了3次7h 的连续自主飞行试验,飞行平稳安全,自主飞行受控。无人机卫星通信链路正常,能够完成无人机的遥测、遥控任务。同时在中国气象局国家计量站风洞实验室做了无人机搭载的气象传感器的风洞试验,测量数据满足静态指标。
2)强降雨气象条件飞行。在江西进行了无人机降水天气条件下适应性飞行测试。为选择在较强的降雨天气条件下进行测试,测试时间选在当地受台风“浣熊”影响的强降雨时段,测试期间内的降水量为42mm,无人机顺利完成了该条件下4h 飞行试验,飞行过程安全平稳。
3)台风探测试验。在浙江省瑞安市成功对“海鸥”和“森拉克”台风进行了探测试验,获取了完整的温度、湿度、压力、风向、风速等气象数据,并准时实将数据传回到中国气象局。图5为测量台风海鸥的测量位置示意图。
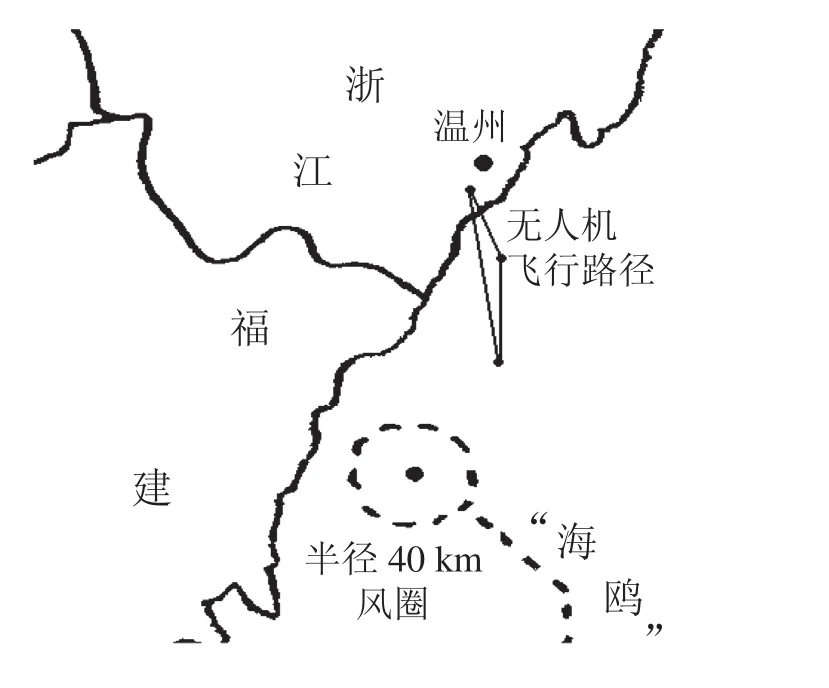
图5 台风测量位置示意图
4)改进试验。为了控制多台飞机,同时为了实时处理北斗卫星信息,第1次飞台风试验后至今一直在进行地面站通信程序多线程修改,基于 Googel Earth 地理信息系统修改,Googel Earth 支持对飞行点高度 H2获取,对应经纬的地面高程 H1获取,通过 H2-H1判定飞行高度是否合理。
2013年上海台风研究所进行的台风测量试验,由于场地、操作人员数量和水平有限,必须对无人机系统进行改造,实现地面弹射,直接自主飞行测试。因此对飞行控制软件进行改造,进行无人机上基于PC-104的气象设备和通信设备交互测试。改进后,试验效果良好,可以在今后测试台风中具体应用。
4 试验结果
2008年7月18日利用无人机探测手段对台风“海鸥”进行探测,将探测的时温图、时湿图、时高图综合在一起对测量结果进行综合显示的时温湿图如图6所示,探测的气压、风速、温度、相对湿度变化图分别如图7~10所示。图6中高度图的两侧上下变化明显处是飞机起飞和降落处的时间点,在飞行高度稳定处的温度保持基本恒定,而湿度变化有起伏,说明温度变化幅度不大,湿度由于台风本身的影响变化很大。
无人机在台风测量时段内,完全处于降水云系内,而且在3h 内,无人机都能够正常飞行,说明这种小型无人机的防水性能较好。从风速数据来看,标准偏差较小,飞机的飞行状态相当稳定,说明利用这种小型无人机进行环台风探测,无人机的飞行姿态还是相对稳定的。气压和海拔高度呈现非常一致的反相关,相关系数达到 -0.99,这进一步说明了,这种小型无人机探测数据的真实性及可靠性。飞机逐渐向台风中心靠近,温度呈现明显的下降趋势,这说明,距离台风越近,环境温度相对较低。
图7~10中的数据理论上是同一时间从不同传感器记录的数据。图9中温度数据出现异常,突然降至5℃ 以下,此后有1次升降的波动,逐渐回升。事后分析,可能是由于水滴附着在传感器上造成的。
图7中,探测期间的气压平均值为949.1±9.7hPa,温度平均值为 24.2±1.3℃,探测期间内,无人机基本处于降水云系中,故相对湿度较高,平均值为(88.4±6.1)%。通过对探测数据的初步分析,说明这种小型无人机具有探测台风边界层气象要素的能力。
5 结语
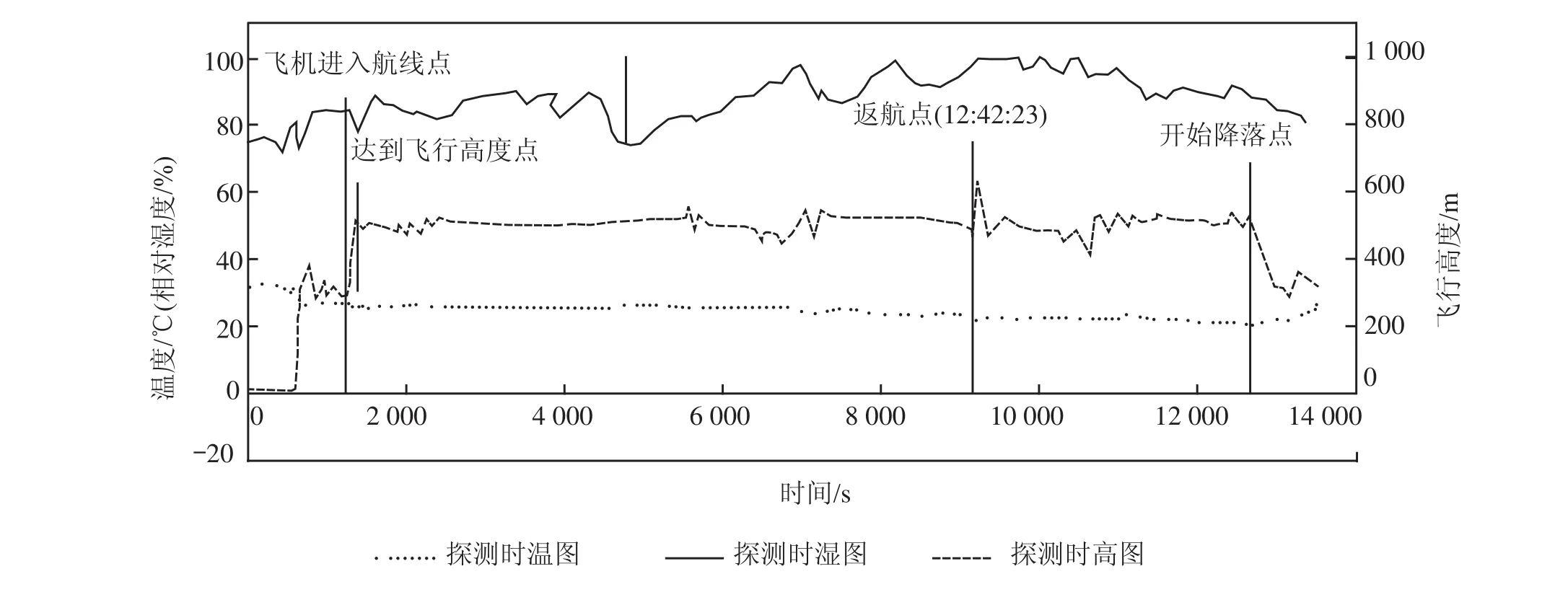
图6 “海鸥”台风探测时温湿图

图7 无人机台风测量系统探测气压变化图

图8 无人机台风测量系统探测风速变化图
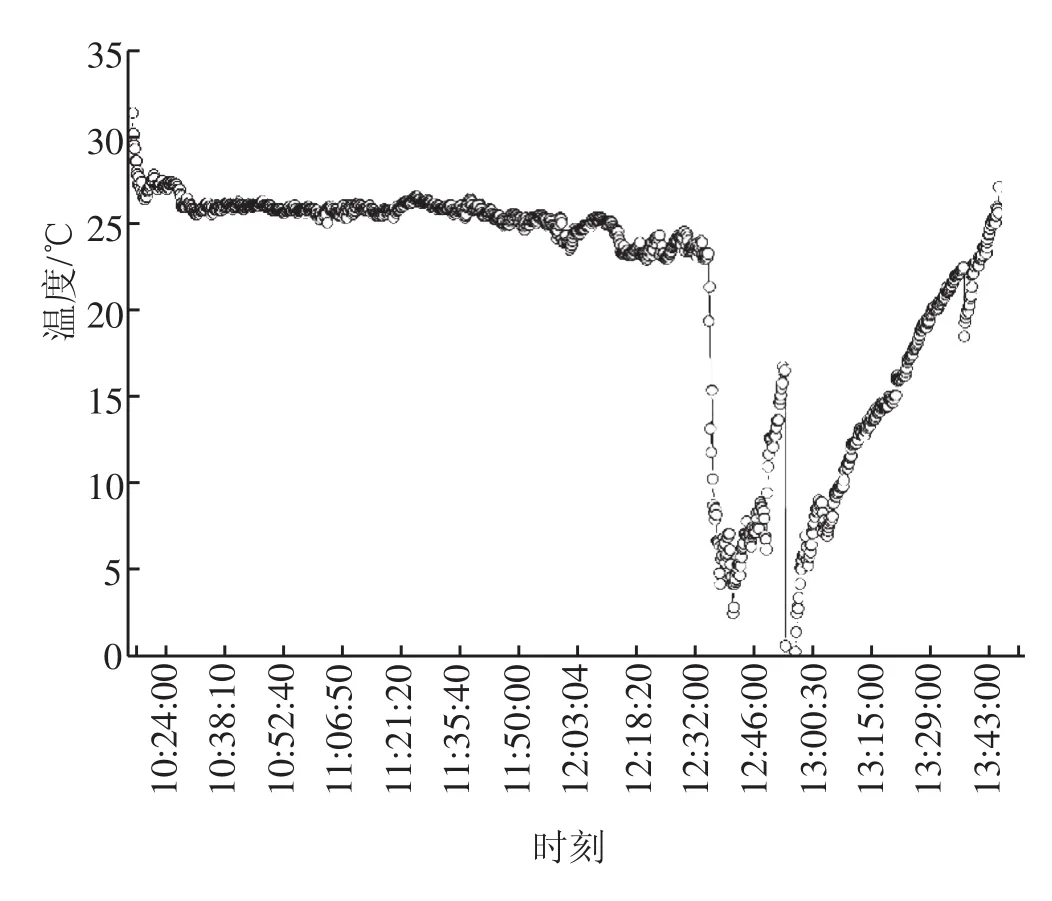
图9 无人机台风测量系统探测温度变化图
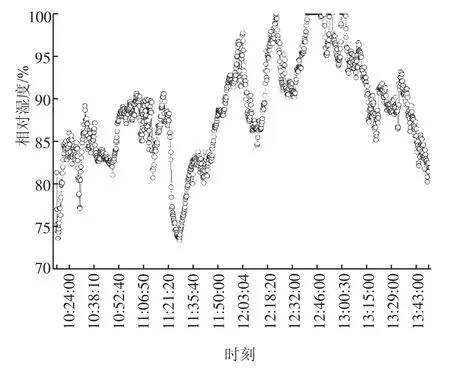
图10 无人机台风测量系统探测相对湿度变化图
使用无人机测量台风,可以在任意高度和经纬度对影响台风的参数温度、湿度、压力、风速等进行测量,以此为台风运动方程的边界数据,对台风进行预测是可以借鉴的。但是飞机本身的发动机热量、机身对大气的摩擦扰动也会给参数的测量带来误差,如何精确地剔出这些干扰的影响是一个很难解决的问题,是本课题进一步研究的内容。和中国台湾及国外运用铱星和海事卫星测量台风方法相比,本方法立足国内北斗卫星,价格便宜,测量频率可以通过北斗卡控制,可以在全国沿海的地点进行推广。
[1] 李杨.无人机探测“海鸥”台风中心附近的资料初步分析[J].地球科学进展,2009,24(8): 1-3.
[2] Arrosonde 公司.AEROSONDE 飞机设计部分资料[R].北京:第二炮兵专用装备管理办公室,2006: 20-40.
[3] 朱自强,王晓璐,吴宗成,等.小型和微型无人机的气动特点和设计[J].航空学报,2006,27(3): 353-364.
[4] 第二炮兵司令部.北斗通信短信资料[R].北京:第二炮兵专用装备管理办公室,2006: 1-25.
[5] 黄瑞.铱星通信在水污染实时监测中的应用[J].现代电子技术,2011(7): 52-54.
[6] 王晓伟,陈希.Windows 环境下可执行文件之间实时通信的实现[J].计算机应用研究,2003(增刊 1): 27-31.
[7] 骆训纪,朱纪洪,孙增沂.无人机航迹系统研究[J].测控技术,2002(21): 11-12.
[8] 王波,陈远知.基于 DSP/GPS 铱/星通信的远程监测系统[J].中国传媒大学学报:自然科学版,2007(2): 12-14.