EM1002S与GeoSwath多波束声纳系统测深精度比较分析
2013-11-12唐秋华陈义兰丁继胜
唐秋华,陈义兰,路 波,文 武,丁继胜
(1.国家海洋局 第一海洋研究所,山东 青岛 266061; 2.国家海洋环境监测中心,辽宁 大连 116023; 3. 国土资源部 海洋油气资源与环境地质重点实验室,山东 青岛 266071)
多波束声纳系统是20世纪60年以来发展起来的新型海底地形地貌勘测设备,多波束声纳系统采取全覆盖测量的工作方式,能够获取工作区高精度海底水深地形数据,在海洋资源调查、海洋工程建设以及海洋科学研究中发挥了重要作用。
多波束声纳系统能够获取得到高精度水深地形数据,不但取决于声纳设备的稳定可靠性,还依赖于在设备安装过程中产生的误差影响。通常影响水深测量结果的安装校准误差很多,在多波束勘测之前,我们需要进行各种校准改正,使其满足多波束勘测技术的要求[1-3]。基于在渤海湾开展的多波束海底地形地貌勘测项目,在项目勘测之前,对EM1002S与GeoSwath多波束声纳系统进行了安装校准,并对两套多波束声纳系统的测深精度进行了比较分析,结果显示测深精度满足勘测技术要求,为我们调查工作的顺利开展奠定了良好的基础。
1 实验概论介绍及多波束声纳系统的安装校准
本次多波束调查区域位于辽东湾、渤海湾和莱州湾三湾交界处,水深为20~30 m,水深变化不大,海底地形比较平坦。我们采用了2套多波束测量设备,2艘调查船只完成该项工作。采用的多波束调查设备是挪威Kongsberg Simrad公司生产的EM1002S多波束声纳系统以及英国GeoAcoustics公司(目前已被挪威Kongsberg公司收购)生产的GeoSwath多波束声纳系统。
EM1002S多波束声纳系统是Simrad公司生产的高精度中浅水多波束测深系统,它的工作频率为95 kHz,最大发射率大于10 Hz,每次发射111个波束,波束宽度为2°×2°,深度测量范围2~1 000 m,采取等距或者等角间隔发射波束,波束覆盖扇面150°,覆盖宽度为7倍水深值。GeoSwath是英国GeoAcoustics公司生产的相干声纳多波束测深系统,它的工作频率为125 kHz,深度测量范围1~200 m,覆盖宽度通常为10倍水深(取决于底质情况);测深精度在6倍水深覆盖时,满足±(0.1m+0.2%水深),6倍以上覆盖时,符合IHO标准。
多波束勘测之前,根据相关的规范[1-3]规定必须对多波束声纳系统进行安装校准和测深精度评定工作,才能用于正式的地形地貌勘测工作中。为了满足勘测技术要求,2012-07-16我们在青岛胶州湾进行了EM1002S多波束声纳系统的安装校准工作,于2012-07-01在大连湾三山岛附近海域进行了GeoSwath多波束声纳系统的安装校准工作;2套多波束安装校准完毕后,我们于2012-07在渤海西部多波束调查区进行了多波束测深精度比较实验(图1)。
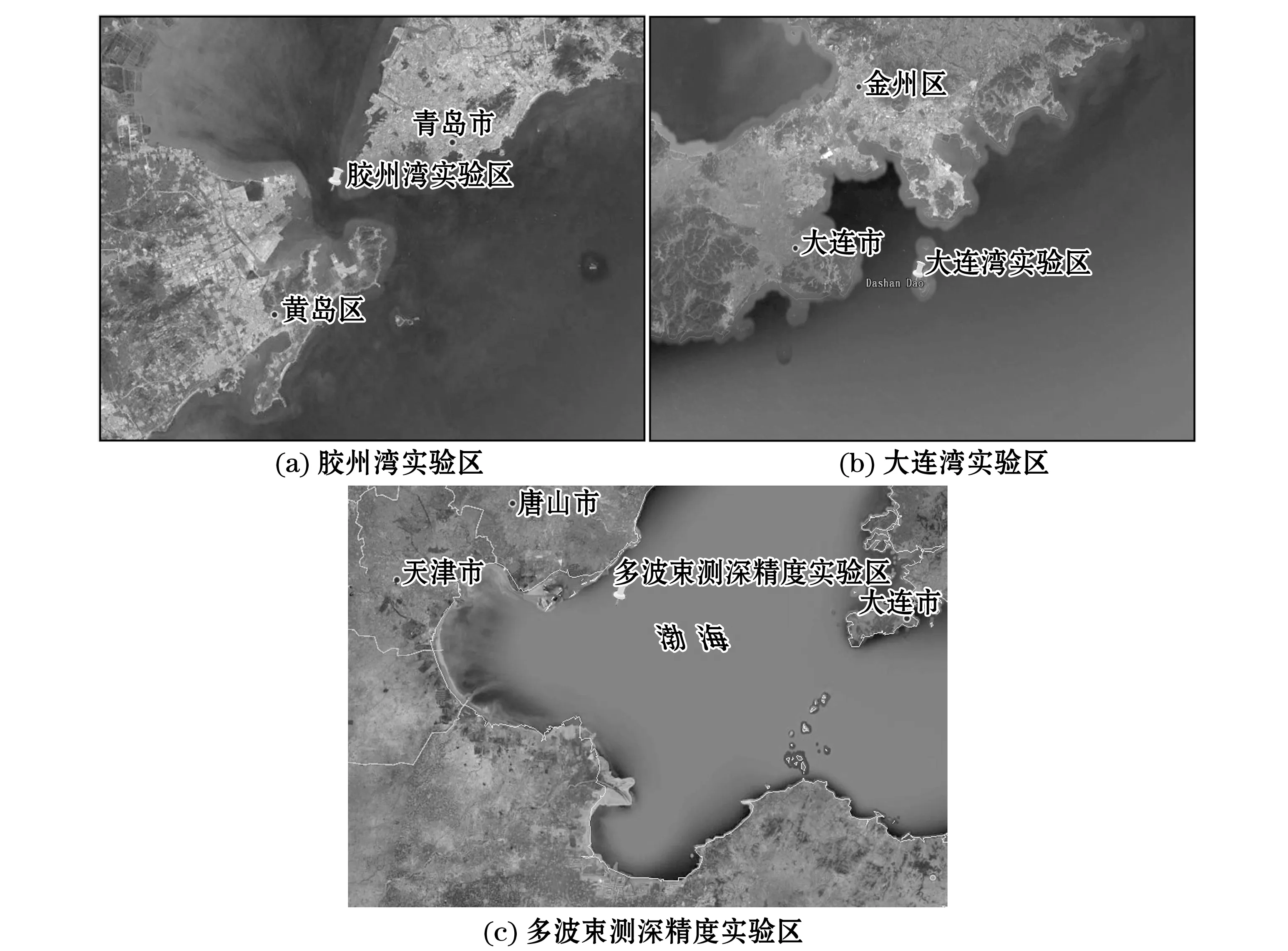
图1 EM1002S与GeoSwath多波束安装校准实验区示意图Fig.1 A sketch map of the experiment area in which the installation and calibration weredone for the multi-beam sonar systems EM1002S and GeoSwath
1.1 EM1002S多波束声纳系统的安装与校准
多波束声纳系统的安装应注意以下主要因素:换能器安装尽可能远离噪声源,比如主机舱、螺旋桨推进器等容易产生噪声干扰的位置;姿态传感器安装位置尽可能靠近多波束换能器,以减小量测换能器姿态变化而产生的误差;各传感器安装位置确定以后,应精确测量各传感器之间相互位置关系,提高最终波束水深点空间归位精度。
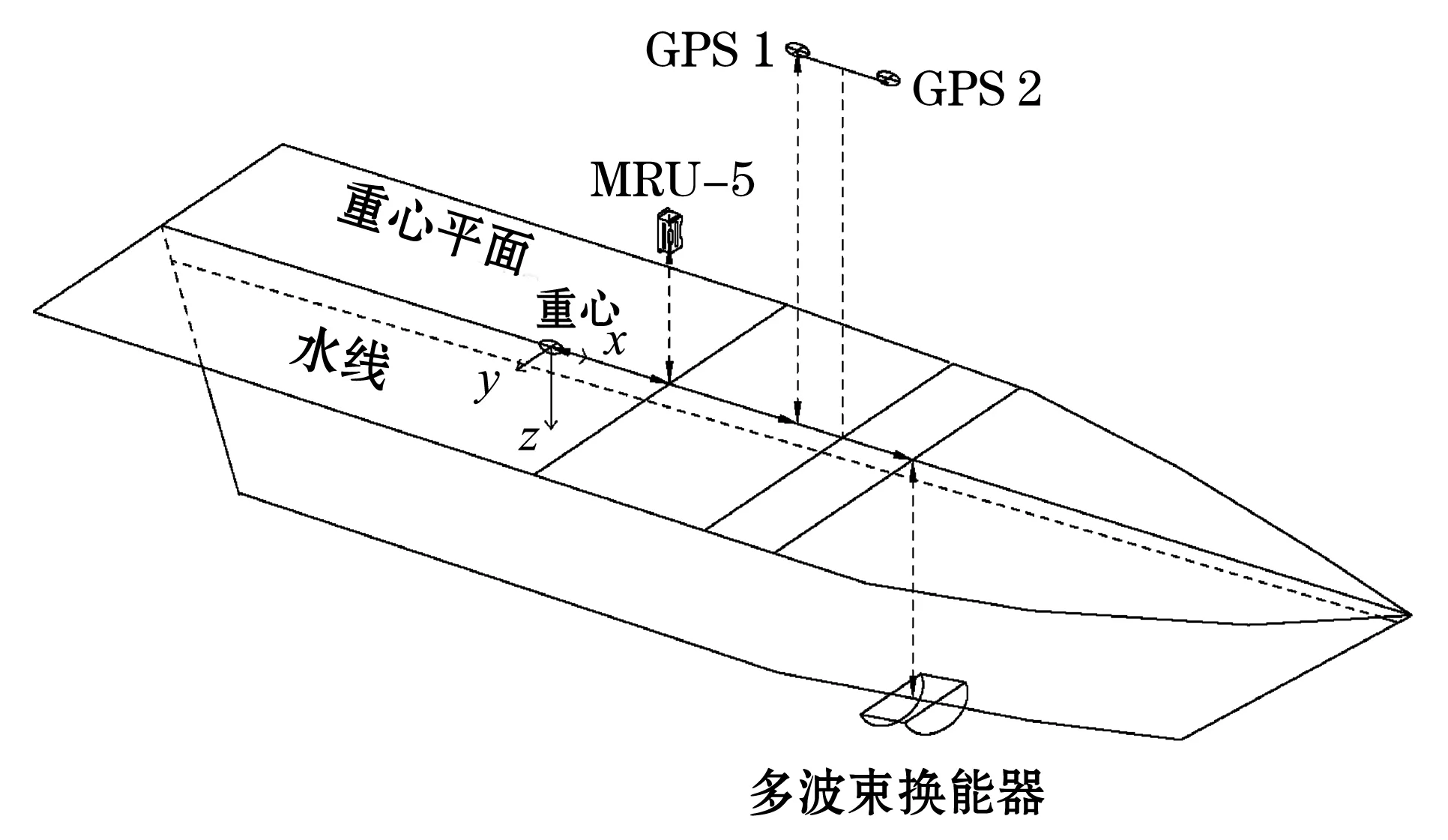
图2 EM1002S多波束声纳系统安装示意图Fig.2 A sketch map showing the installation of multi-beam sonar system EM1002S
将本次外业调查工作使用的EM1002S多波束测深系统依照以上安装注意事项,固定安装在调查船上(各传感器分布位置如图2所示)。Seapath 200三合一姿态系统天线安装在船体顶部的独立支架上;运动传感器(MRU-5)安装在工作室相对稳定的位置;主机柜、操作工作站、导航计算机安装在船体中央的物探工作室;换能器阵列固定安装在海勘08船的底部,通过专用管道将电缆连接到物探工作室主机柜。GPS信号、差分信号和MRU姿态信号通过数据线实时传输到导航计算机,导航工程师将导航信息传输给操作工作站、驾驶室导航显示屏,指挥完成测量任务。EM1002S多波束系统及其配套设备的初始安装参数见表1。

表1 EM1002S多波束声纳系统及配套设备初始安装参数表Table 1 The initial installation parameters of EM1002S and its ancillary equipment
多波束水深测量系统是由多种辅助测量设备综合而成的复杂水底地形地貌测量系统,精确的系统测前校准是保证外业采集数据精度的保障。除了以上介绍的DGPS静态稳定性试验及电罗经静态方位校准外,还应该对多波束换能器安装角度误差及时间延迟进行精确校准,包括横摇偏差(Roll Bias)、纵倾偏差(Pitch Bias)、艏向偏差(Yaw Bias)及时间延迟(Time Delay)校准。
根据多波束校准内容对海底地形特征要求[4],我们在青岛胶州湾选择了不同地形特征的校准海区(图1),对横摇偏差、纵倾偏差、艏向偏差及时间延迟进行精确校准。Roll偏差校准选择了一处平坦海区,其他校准内容选择了地形起伏较大的一处海区,进行了校准数据的采集,根据多波束常用的校准方法[4],对各种传感器安装偏差进行现场解算,经过对试验数据处理分析,得到以下校准结果:

表2 EM1002S多波束声纳系统安装偏差校准结果Table 2 Results of misalignment calibration of EM1002S
最后将结果校准输入到多波束数据采集软件系统中,对多波束采集的水深数据进行实时改正,获取高精度多波束测量数据。
1.2 GeoSwath多波束声纳系统的安装与校准
为了更快更好完成调查任务,本次调查任务还采用了GeoSwath多波束声纳系统。将GeoSwath 换能器安装在调查船龙骨中心位置,参考方向指向船艏,换能器中心距离安装井口4.26 m(如图3所示)。换能器通过电缆经安装井连接至主机,换能器下方使用钢板与前后船底焊接,保证声波发射角度不受船体干扰的同时,避免了海底障碍物对换能器的刮碰,保证了设备的安全性和稳定性。GeoSwath主机、显示器等设备安装在驾驶室内,保证了测量工作人员能够实时监控多波束测量仪器的状态参数,并可与调查船驾驶员随时交流,及时调整船只航行状态、处置突发情况等。

图3 GeoSwath多波束声纳系统安装位置关系示意图(m)Fig.3 A sketch map showing the installation of multi-beam sonar system GeoSwath(m)
GeoSwath多波束声纳系统同EM1002S多波束声纳系统一样,在海底地形勘测前必须进行横摇偏差、纵倾偏差、艏向偏差及时间延迟等4个校准参数的精确测定。其中,时间延迟是指当用机器时间来标记水深和位置值时,GeoSwath与导航定位设备或任何其它附加测量系统之间的电子延迟;艏向偏差是指GeoSwath换能器和艏向设备之间的偏移量,即电罗经指向和换能器指向之间的差值;横摇偏差是指在换能器横截面上,运动传感器竖向轴线和换能器竖向轴线之间的角度;纵倾偏差是指在换能器纵向剖面上,运动传感器横截面和换能器水平向截面之间的角度。
横摇偏差的测试需要平坦海底海域或平直斜坡海域;纵倾偏差、艏向偏差和定位时间延迟的测试需要存在标志地物的平坦海底海域或平直斜坡海域。根据历史测深资料,选择了位于大连湾三山岛附近的两个区域做校准区域:一为平坦海底区域,水深约为42 m;另一为地形坡度变化均匀的区域,水深15~40 m(如图1所示)。
GeoSwath多波束声纳系统的海上校准测量开始前,首先进行声速剖面测量,并精确测量换能器吃水深度、DGPS定位天线和运动传感器位置偏移量后输入GeoSwath 声纳系统,各待校准参数均预置为0。
在GeoSwath多波束测量设备与各附属组成单元的时间延迟中,Trimble R5 DGPS提供了PPS信号与GeoSwath主机进行时间同步,因此定位时间延迟为0.000 s;DMS-05运动传感器数据时间延迟采用生产厂商推荐值0.009 s;SG Brown电罗经输出数据值变化速率较缓慢,时间延迟对其影响较小,可忽略不计,故设为0.000 s。
测量系统工作稳定后进行校准测量,施测航速约7 n mile/h,施测时航向保持稳定。平坦海底区域沿东西方向平行施测三条校准测线,取条幅覆盖宽度100 m,相邻测线方向相反,间隔100 m,重叠率100%。平直斜坡区域沿垂直等深线方向平行施测三条校准测线,取条幅覆盖宽度50 m,相邻测线方向相反,测线间隔50 m,条幅重叠率100%。
现场校准测量完成后,利用GeoSwath数据处理软件计算Roll、Pitch和Yaw等3个校准参数。GeoSwath数据处理软件利用左、右船舷重叠条幅数据和GeoSwath数据处理软件中的校准功能对左、右舷安装偏差分别进行校准计算。将初步得到的各项校准参数输入GeoSwath 数据处理软件,对3条校准测线的原始测量数据进行再处理,通过比对相邻测线条幅重叠区的格网化水深数据和水深等值线,进行校准参数的微调。将新的校准参数输入GeoSwath Plus软件,重复原始数据处理和结果比对的步骤,直到处理结果中相邻测线条幅重叠区的格网化水深数据和水深等值线比对良好、计算得到的校准数据无重大变化为止。最终确定最适宜的GeoSwath多波束声纳系统的校准参数值(表3):

表3 GeoSwath多波束声纳系统安装偏差校准结果Table 3 Results of misalignment calibration of GeoSwath
2 实验结果与分析
由于整个项目调查工作量大,为了按时完成年度测量任务,我们利用EM1002S和GeoSwath两套多波束声纳系统完成测量任务。为了分析不同多波束声纳系统之间的测深系统误差,对每套多波束声纳系统正式勘测前,均进行同一区域的水深测量对比工作,对水深测量比对数据进行了处理和分析,得到两套多波束声纳系统之间的测深精度对比结果。
2.1 测深精度比对测量实施
两套多波束测深精度的比对选择在调查区东北部海域(图1),该海域地形平坦,测区水深约24 m(平均海平面以下)。比测线的布设采取井字形测线,设计每条比测线长1 000 m,与相邻测线间隔100 m,测量采用WGS-84坐标系、UTM投影。在EM1002S和GeoSwath两套多波束声纳系统正式勘测前,先按照设计的测线进行水深测量(如图4,表4所示),并在附近平台同步验潮,保证测深数据归算到同一基准面上,使测量数据具有可比性。

图4 不同多波束声纳系统之间测深精度比对测线布设示意图Fig.4 The layout of survey lines for comparing the sounding accuracies between different multi-beam sonar systems

测线起始坐标/m东西(X)南北(Y)结束坐标/m东西(X)南北(Y)A683657.464315524.09683668.954315030.82B683756.144315526.39683767.634315033.121683464.704315322.19683958.094315333.682683467.004315223.54683960.394315235.02
2.2 测深精度比对数据处理
不同的多波束采集的数据因为格式的不同,采用不同的多波束数据处理软件处理。EM1002S多波束测量数据用加拿大Caris 公司的 Caris Hips软件进行处理,GeoSwath多波束测量数据应用GeoSwath Plus软件进行处理。
尽管不同的测量数据采用不同的数据处理软件,但是多波束数据处理过程基本一致,主要包括定位数据处理和水深数据处理两大步骤。水深数据处理主要包含各项参数改正,如横摇、纵倾、船艏向和时间延迟改正,声速改正,吃水改正、潮位改正等;人机交互方式进行数据清理滤波等。利用软件的这些功能对测量数据进行精细处理,最后输出处理后的结果数据,水深比测结果数据统一归算到当地平均海平面。
2.3 测深精度比较分析
1)各套多波束系统内符合精度
在进行多波束比对测量的过程中,各平行测线间有重叠测量,采用重叠部分的水深对多波束系统自身进行内符合精度评估,按照项目设计书和多波束勘查技术规范要求[1-3],准确度评估公式为
(1)
式中,σ为中误差,单位为m;hi为不同测线条幅重复测点水深测量值的差值,单位为m;n为重复测点组数,两个重复点为一组。
首先将测线交叉区及附近700 m内的多波束测量数据按2 m间距进行网格化(图4),然后对重叠区域的水深数据按照式(1)进行统计分析。EM1002S多波束系统共选出重复点16071组,计算得到水深测量中误差σ=0.11 m;GeoSwath多波束系统共选出重复点10948组,计算得到水深测量中误差σ=0.18 m;两套多波束声纳系统水深测量内符合精度见表5。
根据水深测量规范[1-3]和施工设计要求,当水深<30 m时,多波束水深测量中误差应<0.3 m,该比对区的水深约为24 m,故比对区水深测量中误差应<0.3 m。由表5可知,EM1002S水深测量中误差为0.11 m,GeoSwath水深测量中误差为0.18 m,均满足测量中误差应<0.3 m的规范和施工设计技术要求,可以参加多波束声纳系统间的比对。

表5 多波束声纳系统水深测量内符合精度Table 5 The inner precisions of bathymetric survey by using EM1002S and GeoSwath
2)不同多波束系统之间测深精度比较
参加比对的EM1002S和GeoSwath两套多波束声纳系统,由于其工作原理及技术指标不一样,导致测点密度差异较大,为了能有效比较各多波束声纳系统的测深精度,用不同多波束声纳系统所测得水深建立各自的网格大小为2 m×2 m 的海底DTM(图4),然后将两地形模型相减,得到同一网格位置的水深差作为重合点深度不符值,计算对比精度,表6和图5为两套多波束系统间的水深测量比对结果。
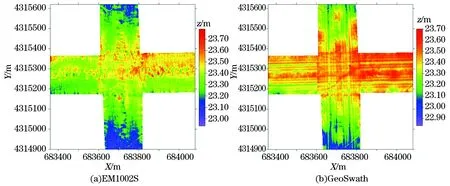
图5 两套多波束声纳系统2 m×2 m网格化数据Fig.5 The 2 m×2 m grid data resulted from multi-beam sonar systems EM1002S and GeoSwath

差 值0~0.2 m0.2~0.3 m0.3~0.6 m>0.6 m合 计点 数57 5033 1616060 670百分比94.78%5.21%0.01%0100%
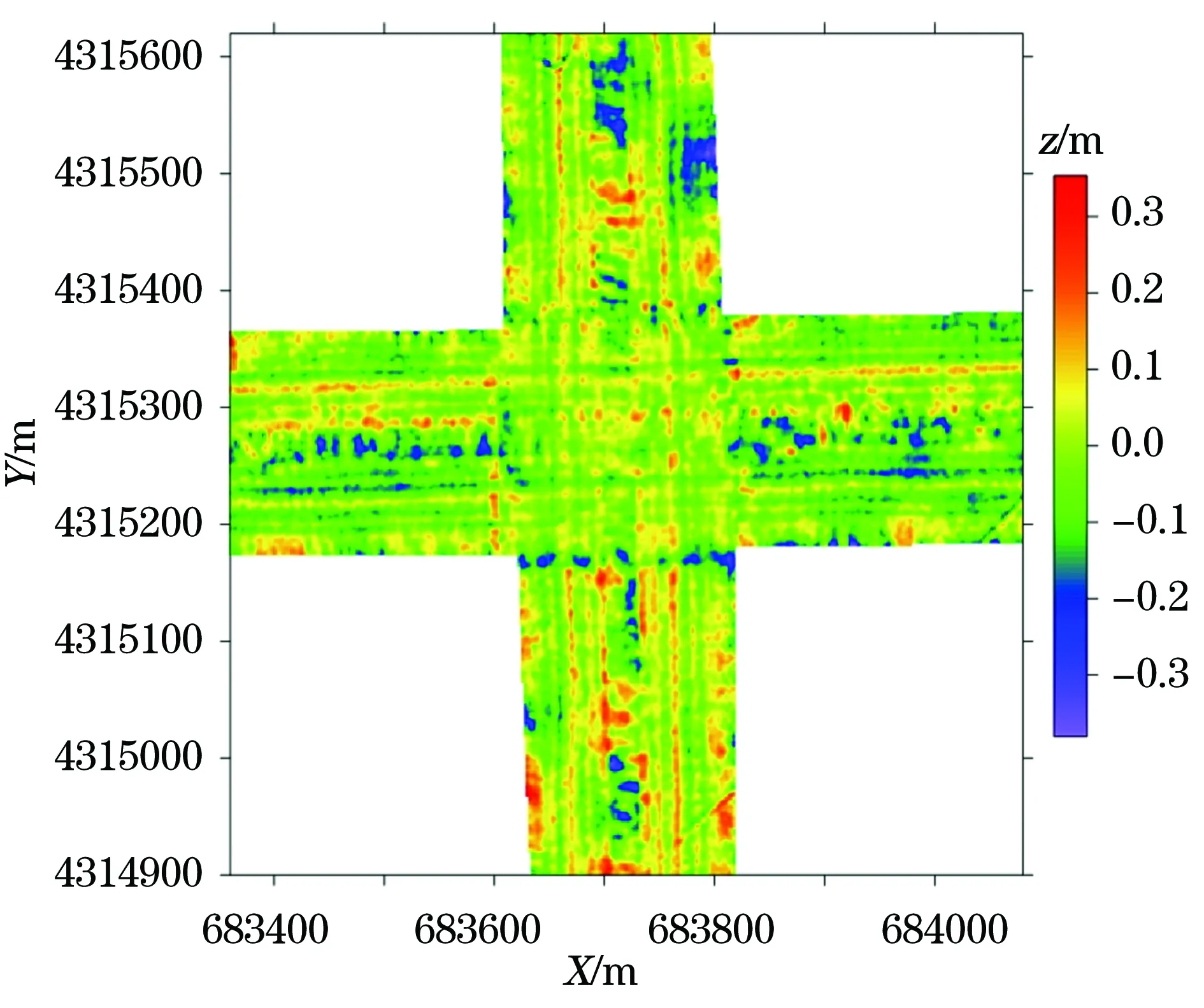
图6 EM1002S和GeoSwath测深精度比较误差分布图Fig.6 Error distributions of the sounding accuracies of EM1002S and GeoSwath
2套系统间的重合点为60 670点,水深约为24 m。根据规范和施工设计要求,水深<30 m时,两系统间重合点深度不符值限差为0.6 m,超限点数不得超过参加总比对点数的10%,故两套多波束系统间的深度不符值限差不应超过0.6 m。通过计算,得到两套多波束声纳系统间比对中误差为0.08 m,误差统计见表6,误差分布图见图5所示。
从误差表6和图6中可以看出,两套系统之间的最大误差为-0.38 m,误差主要为0~0.2 m,无超限数据,2套多波束声纳系统测量精度满足施工设计技术要求,可以同时用于调查项目的海底地形勘测工作。
3 小 结
多波束勘测之前,为了保证多波束成果质量, 需要对多波束声纳系统进行设备安装校准和精度评估工作。通过对EM1002S和GeoSwath两套多波束声纳系统的比对试验得出,EM1002S水深测量中误差为0.11 m,GeoSwath水深测量中误差为0.18 m,均满足测量中误差应<0.3 m的规范和施工设计技术要求;两套系统之间的最大误差为-0.38 m,误差主要分布为0~0.2 m,比对中误差为0.08 m,无超限数据,两套多波束声纳系统测量精度满足勘测技术要求,可以同时用于调查项目的海底地形勘测工作。
参考文献:
[1] GB12327-1998 海道测量规范 [S]. 北京: 中国标准出版社, 2004.
[2] GB17501-1998 海洋工程地形测量规范 [S]. 北京: 中国标准出版社, 2004.
[3] GB/T 12763.10-2007 海洋调查规范第10部分:海底地形地貌调查 [S]. 北京: 中国标准出版社, 2007.
[4] 张海涛, 唐秋华, 周兴华,等. 多波束测深系统换能器的安装校准分析 [J]. 海洋通报, 2009, 28(1): 102-107.
[5] 邢玉清, 刘铮, 郑红波. 相干声纳多波束与传统型多波束测深系统综合对比与实验分析 [J]. 热带海洋学报, 2011, 30(6): 64-69.