防水卷材厚度测量分析
----基于TM130和激光位移传感器
2013-11-12陈俏苇朱亚超
陈俏苇, 朱亚超,龚 力, 何 涛
(1 湖北省现代制造质量工程重点实验室, 湖北 武汉 430068;2 湖北工业大学电气与电子工程学院, 湖北 武汉 430068;3 湖北工业大学机械工程学院,湖北 武汉 430068)
超声检测利用材料本身内部缺陷的声学性质对超声波传播的影响,非破坏性地探测材料表面和内部缺陷(如裂纹、气泡、夹渣等)的大小、形状和分布状况以测定材料的性质.与其他检测方法相比,超声检测具有穿透能力强、灵敏度高、对人体无伤害等优点.防水卷材作为建筑工业领域里的一种重要工业材料,在桥梁、隧道、农业水利和交通运输等领域应用十分广泛,其测量厚度的要求也越来越高.本文采用了数字超声测厚仪和激光位移传感器相结合的测量方法,首先使用激光位移传感器精确测量防水卷材的厚度,再用TM130数字超声检测仪测量其声速值.在已知声速的情况下,对同一种防水卷材通过比较测量,用超声测厚仪就可以很方便地测量出厚度值.
1 系统组成及测量原理
1.1 TM130数字超声测厚仪测量原理
TM130是一种智能化手持式超声波测厚仪,采用微处理器控制,利用超声波测量原理,能够快速、无损伤、精确地测量多种材料[1].凡是超声波能以恒定波速传播且对背面产生的反射波可分辨的各种材料均适用于此仪器.该仪器显示最小单位为0.1 mm,工作频率为5 MHz,测量范围为1~225.0 mm,测量误差为(±1% )×H+0.1 mm,H为被测物实际厚度.图1为TM130测量实物图.

图 1 TM130超声测厚仪测量实物图
测厚仪由发射电路、接收电路、高频震荡器、计数门、计数器、中央处理器、键盘、显示器等部分组成.其原理与光波测量原理相似.探头发射的超声波脉冲到达被测物体并在物体中传播,到达材料分界面时被反射回探头,通过精确测量超声波在材料中传播的时间来确定被测材料的厚度(图2).
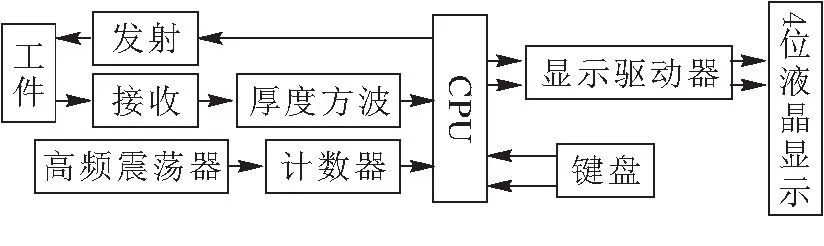
图 2 超声测厚仪系统框图
1.2 激光位移传感器测量原理
激光位移传感器采用三角法非接触测量物体位移和厚度:
用一束激光以某一角度聚焦在物体表
面,然后从另一角度对物体表面上的激光光斑进行成像,物体表面激光照射点的位置不同,所接受散射或反射光线的角度也不同.用CCD测出光斑像的位置,即可计算出物体面激光照射点的位置[2].当物体与激光线发生相对移动时,测量结果就将发生改变,从而实现用激光测量物体的位移.其测量原理如图3所示.

图 3 激光位移传感器测量原理图
激光发射与接收由感测头来完成.感测头在激光位移控制器的控制下发射一定频率的激光,并将接受到的反射激光信号传输到控制器,感测器的LED灯会显示当前的测量状态:当发光为绿色或橙色时,表示在测量范围内,此时会在控制器上显示当前测量值;当发光为红色时,表示在测量范围之外,有警报或者激光灭.感测探头的探测范围如图4所示,其中测量范围取决于反射方式和取样率.

图 4 感测探头示意图
圆括号内的是当前取样率为20 μs时的数值
2 测量结果与误差分析
2.1 测量结果
测量时选用的控制器型号为LK-GD500,最多可连接两个感测头,精确到0.01μm,可显示范围为±9 999.99 mm到±9 999.99 μm,显示周期为10 次/s,自带的RS232和USB接口可以方便地与主机通讯,并储存和打印测量值;感测头选用的型号为LK-G10,其参照距离为10 mm,测量范围±1 mm,采用红色半导体激光作为光源,取样率为20、50、100、200、500、1000 μs,可在6步当中选择.系统测量实物图如图5所示.

(a)测量环境
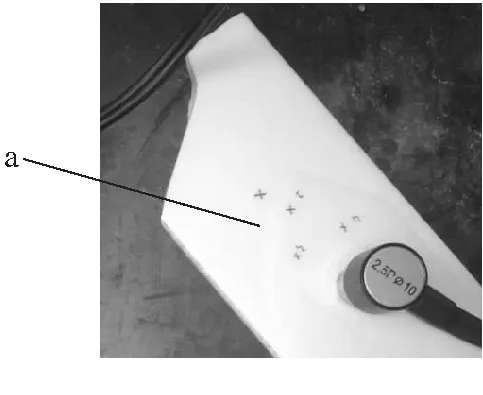
(b)基准点选取图 5 激光测量实物
测量时选取一基准点a0,在不同的厚度上分别选取两个测量点b1、b2和c1、c2,依次测量其与基准点的高度差,表1为测量值[3].

表1 激光位移传感器测量值
表2为TM130数字超声测厚仪在相同条件下的测量值(c1、c2与a0的高度差).
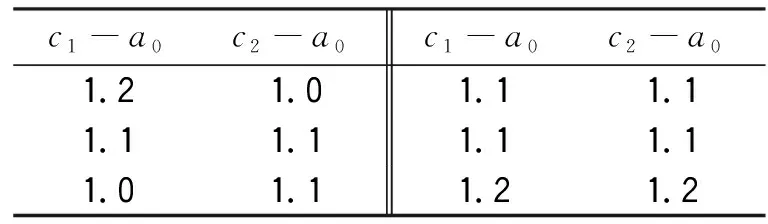
表2 TM130数字超声测厚仪测量值
由激光测量仪获得的数据结合超声测厚仪,可得防水卷材声速值v1=525 m/s.

误差值在允许的范围内.
2.2 影响系统测量精度的因素
1)TM130测厚仪本身的测量精度和耦合剂的选用,直接影响最后误差的精度.
2)激光位移传感器本身的测量精度,以及安装感测头时与被测物体(防水卷材)不垂直,是影响系统误差主要因素.此外,两仪器的测量精度不一样,会影响误差的精度范围.
3) 防水卷材涂层不均匀导致测量同一点时激光定位不一致,也会影响最终的测量结果.
3 结论
根据不同的材料和测量精度,可选取不同测量范围的感测头实现测量,在已知声速的情况下,使用数字超声测厚仪实现防水卷材的厚度测量.该方法对其他难以用接触式测量方法的材料亦适用.
[参考文献]
[1] 柯细勇,王占元,杨剑峰,等.一种新型便携式超声波测厚仪的设计[J].传感器与微系统,2011,30(12):119-125.
[2] 朱万彬.激光位移传感器在物体表面形状测量中的应用[J].光机电信息,2010,27(10):70-72.
[3] 杨练根.互换性与技术测量[M].武汉:华中科技大学出版社,2010:107-108.
