异步电机软启动的模糊控制研究
2013-11-06戴璐平武汉工程大学电气信息学院湖北武汉430073
戴璐平 (武汉工程大学电气信息学院,湖北 武汉 430073)
异步电机软启动的模糊控制研究
戴璐平 (武汉工程大学电气信息学院,湖北 武汉 430073)
异步电机作为重要的动力装置被广泛应用。分析了异步电机启动特性,介绍了基于模糊控制的电机软启动电流控制原理,并利用Matlab仿真软件进行仿真。仿真结果表明,对异步电机软启动模糊控制后,能够有效地起到减小启动电流、抑制冲击转矩的作用。
异步电机;模糊控制;软启动;启动电流
异步电机具有结构简单、价格低廉、坚固耐用和运行可靠等优点,在工业生产中得到了广泛应用。电动机软启动器一般以大功率双向晶闸管构成交流调压电路,通过控制晶闸管的触发角来调节晶闸管调压电路的输出电压。然而,基于晶闸管调压的软启动器在实际应用时,电机轻载软启动过程中,常常出现电流、电磁转矩以及转速的振荡,最终对负载产生冲击,从而对设备造成损坏[1]。针对上述情况,笔者利用模糊推理和模糊决策对异步电机启动过程中的电流大小进行控制,实现了系统平稳启动,从而有效解决电流振荡问题。
1 异步电机软启动模糊控制策略
1.1模糊控制原理

图1 异步电机软启动模糊控制原理图
模糊控制作为一种语言控制器,主要模仿人的控制经验,其特性是对过程参数变化不太敏感,能克服非线性、时变和纯滞后因素的影响,具有很强的鲁棒性[2-3]。异步电机启动过程是非线性时变系统,模糊控制作为智能控制的一种,适用于异步电机的软启动过程。异步电机软启动模糊控制原理图如图1所示。

图2 模糊控制器构成图
由于异步电机起动过程中反馈电流与晶闸管触发角之间没有精确的数学模型,采用的模糊控制方法选取起动电流偏差e和偏差变化率Δe作为模糊控制器的输入量,e和Δe均为精确的输入值,晶闸管触发角的变化值μ(x)作为输出量。控制过程中由模糊控制器对输入量模糊化、模糊推理后得到输出控制量,从而控制三相异步电动机晶闸管的触发角,最终改变三相异步电动机的输入电压以实现软起动[4-5](见图2)。
1.2限流模糊控制
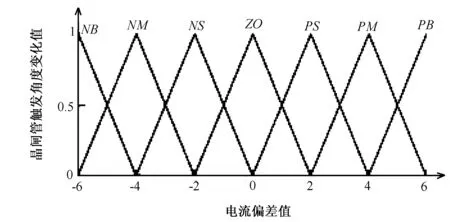
图3 电流偏差三角型隶属函数图
从理论上讲,模糊控制量划分的状态维数越高,控制越精细。但是维数越高,控制规则将变得越复杂,控制算法的实现也变的十分困难[6-7]。但如果将模糊控制量的状态维数划分太小,则在调节过程中容
易出现振荡和调节“死区”。为了避免电动机起动电流产生较大波动,同时考虑到实际应用中异步电机调节所能达到的灵敏度,e、Δe和μ(x)均采用三角型隶属度函数,为其选取7个语言集{NB,NM,NS,ZO,PS,PM,PB}表示{负大,负中,负小,零,正小,正中,正大}。各值论域如下:e的基本论域为[-6,+6]; Δe的基本论域为[-0.6,+0.6];μ(x)的基本论域为[-1,1]。电流偏差三角型隶属函数曲线图如图3所示。
1.3模糊控制规则
由于每个输入变量有7个模糊子集,所以共有49条模糊推理规则。控制规则总模糊关系如下:
R=R1∪R2∪ …∪R49R1=[(NB)e×(NB)Δe]T×(PB)u
R2=[(NM)e×(NB)Δe]T×(PB)u……R49=[(PB)e×(PB)Δe]T×(NB)u
模糊控制规则表如表1所示。
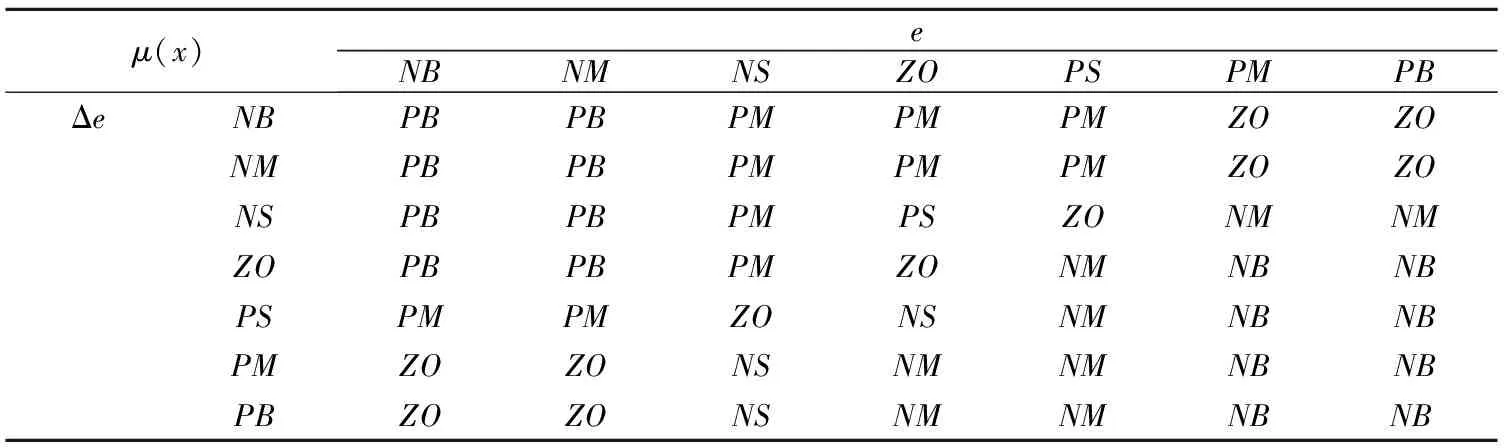
表1 模糊控制规则表
1.4模糊推理及去模糊化
依据模糊推理合成规则,则输出语言变量论域上的模糊子集有:
u=(e×Δe)oR(o为合成运算)
对模糊子集去模糊化,就可判决出一个精确的控制量。笔者用加权平均法对其进行判决:
式中,μu(ui)为输出模糊集合u的隶属度;ui为论域U={-7,-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6,+7}中的元素。
2 仿真试验
为了验证异步电机软启动模糊控制策略的有效性,进行相关仿真试验。异步电机相关参数如下:额定功率为2.2kW,额定电压为220V,定子电阻为0.457 Ω,定子电感为2mH,转子电阻为0.815Ω,转子电感为2mH,互感为69.36mH。异步电机软启动时的转速、转矩、电流变化的仿真曲线图如图4所示。由图4可知,异步电机启动过程中电机转速基本呈线性上升(见图4(a)),电磁转矩随着晶闸管导通角的增大,迅速趋于平稳(见图4(b)),电机电流基本保持在设定值附近,恒流控制效果良好,当交流电机启动完成后,电机电流回落到12A附近,电机进入稳定工作状态(见图4(c))。因此,对异步电机软启动模糊控制后,能够有效起到减小启动电流、抑制冲击转矩的作用。

图4 仿真曲线图
3 结语
将模糊控制策略应用到电动机软启动器的设计中,使控制器智能化,增强了系统鲁棒性,从而解决电动机启、停过程中电流、转矩对电机本身的机械冲击及对电网的负面影响等问题。仿真结果表明,该模糊控制策略具有较好的运行效果,能够有效起到减小启动电流、抑制冲击转矩的作用。
[1]刘红樱.异步电机软启动器设计[J].机电工程, 2007,24(3): 74-76.
[2]范正翘.电力传动与自动控制系统[M].北京:北京航空航天大学出版社,2003.
[3]杜江.三相感应电动机软启动及节能运行技术的研究[D].天津:河北工业大学,2007.
[4]洪乃刚.电力电子和电力拖动控制系统的Matlab仿真[M].北京:机械工业出版社,2008.
[5]孙津济,房建成,王建民.异步电机软启动过程中的振荡[J].电工技术学报,2007,22(2):35-37.
[6]崔纳新.模糊智能控制的异步电动机平稳软起动研究[J].电气传动,2004,4:29-32.
[7]孙志平.电动机软启动技术综述[J].吉林化工学院学报,2009(5):73-78.
[编辑] 李启栋
TM342
A
1673-1409(2013)22-0068-02
2013-05-15
戴璐平(1969-),女,硕士,讲师,现主要从事自动控制方面的教学与研究工作。
