嫦娥一号卫星飞行控制模拟器的设计与研制
2013-11-05郑爱武周建平
郑爱武 周建平
(北京航空航天大学 宇航学院,北京100191)
麻永平
(航天飞行动力学技术重点实验室,北京100094)
航天器的健康和安全在很大程度上取决于任务操作组的水平,因此各个国家也越来越重视模拟器的研制.飞控模拟器通过模拟卫星各分系统的主要功能和动力学,对飞行程序和地面测控方案进行正确性验证,同时训练任务操作人员.特别是在航天器发生故障需要修改星上软件时,可以先通过模拟器进行仿真验证,从而降低任务风险.1991年4月Galileo出现了一次硬件故障,高增益大天线未能展开,使得科学数据链路必须切换至低速率的低增益天线.为了实现任务的科学目标,要求对飞行软件进行升级,以便使用复杂的数据压缩和管理技术.为此,地面使用模拟器进行了充分地仿真验证,对星载软件进行了修改,从而最大程度地恢复了科学数据的下载[1].
近年来,各国在模拟器的开发上越来越重视节约成本和重复利用.例如欧空局的罗塞塔和火星快车模拟器,研制人员为这两个模拟器建立一个公共的编码平台,简化了开发过程,节约了成本[2],巴西则通过基于面向对象的建模和设计,使模拟器软件能被重复使用从而降低成本[3].保真度是模拟器最重要的一个指标.为了实现高保真度,模拟器必须具有高精度的动力学模型[4].JPL专门开发一套复杂的动力学模型称为Dshell,可以单独使用,也可以与其他系统一起组成大系统使用.Dshell已成功应用于美国国家航空航天局(NASA)的行星际深空任务,如Galileo、Cassini、Galileo,Mars Pathfinder,和 Stardust等任务.另外一个提高模拟器保真度的方法是直接嵌入星载软件,欧空局的卫星模拟器大都构建在SIMULUS基础上[5-6],包括运行时间框架、软件仿真程序和一组可重复使用的通用模型.软件仿真程序的一个关键模块就是星载软件[7].
嫦娥一号卫星任务是我国首次月球探测任务,没有成熟的经验可以借鉴.这次任务的重要飞行控制事件多,变轨精度要求高、风险大;卫星有多种工作模式,控制逻辑复杂;地面测控的技术难度和组织协同复杂性前所未有,对飞控中心的遥控和数据注入、遥测数据处理、飞控计划安排、轨道确定、姿态确定、控制策略制定都提出了很高要求.因此,需要专门为飞控中心研制一套飞控模拟器,用于任务准备阶段的飞控演练,以训练飞控人员,并验证各类任务软件、飞控实施方案和实施流程的有效性和正确性.
1 问题描述
飞控中心以往的模拟器存在以下几个问题:
1)软件结构采用集中式,修改起来涉及面广,影响域大,升级困难.
2)只能与USB(Unified S Band)测控站配合使用.虽然有利于验证星地接口,但由于测控站的使用涉及到相应的设备及其操作人员,在接口验证正确后,如果仍然这么使用,在人力和财力上会造成巨大的浪费.
3)模拟器的数学模型与星载软件不一致,保真度低.不能真实地模拟卫星的实际功能和任务状态,因此不能有效地验证飞控实施方案的有效性和正确性.
4)加速跳时不能跨越变轨过程,每次系统演练都必须从发射段或星箭分离开始启动仿真,使得系统演练非常不灵活.
5)没有一个集中监控的平台,需要几个操作人员同时进行操作和监控,并要求一定的配合,使用起来很不方便.
针对这些问题,嫦娥一号飞控模拟器在设计中都一一进行了改进.
2 模拟器设计
2.1 功能设计
如图1所示,飞控中心的任务系统、数字仿真系统与飞控模拟器构成了任务演练的数据回路与仿真环境.任务系统的遥控指令和注入数据发送到飞控模拟器,模拟器正确响应后,生成相应的遥测参数送回任务系统进行处理.同时飞控中心的测控网仿真根据模拟器轨道动力学产生的星历数据,结合测站信息和测站预报输出相应测站的外测数据.
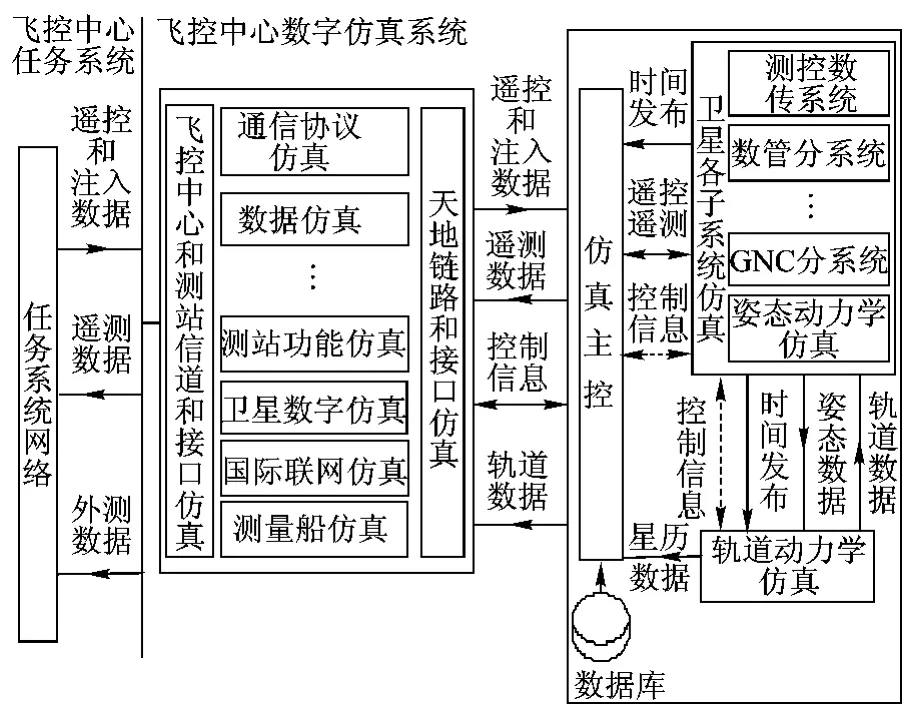
图1 嫦娥一号飞控模拟器和系统演练回路原理框图
飞控模拟器在功能上包括卫星分系统仿真、轨道动力学仿真和姿态动力学仿真.卫星分系统仿真根据各分系统的功能和特性建立不同的仿真模型,并在各分系统模型之间建立关联仿真,能正确地响应地面系统的遥控指令和注入数据;轨道动力学仿真包括卫星动力学以及空间环境的仿真,动力学仿真提供卫星的轨道信息,空间环境仿真包括空间环境和太阳系内主要天体的动力学仿真;姿态动力学仿真包括测量敏感器模型和制导律模型,基于不同的敏感器模型和安装矩阵采用不同的制导计算方法,控制驱动机构.
2.2 硬件组成
飞控模拟器在硬件上由数管仿真计算机、实时计算机、调度计算机、轨道仿真计算机、遥测遥控计算机和仿真主控机等多台计算机组成.其中数管仿真计算机、调度计算机、遥测遥控计算机和仿真主控机构成了飞控模拟器以太网.实时计算机、调度计算机、轨道仿真计算机和遥测遥控计算机构成了GNC(Guidance,Navigation and Control)系统的内部以太网,轨道仿真计算机接入了USB测控站的网络,仿真主控机接入飞控中心的数字仿真局域网.
2.3 使用模式设计
飞控中心以往的模拟器只有一种使用模式,在这种模式下,模拟器的遥控遥测信号都是视频信号,分别与USB测控站的遥控终端和遥测终端相连,有利于验证星地接口.但由于大部分的联调都是内部演练,主要目的是验证任务软件功能以及训练任务操作人员,没有必要对星地接口进行重复验证.由于USB测控站的使用涉及到相应的设备及其操作人员,如果每次使用模拟器都必须同时使用USB测控站的话,在人力和财力上都造成了巨大的浪费.因此,嫦娥一号飞控模拟器提出了另一种使用模式,即网络模式.
在这种模式下,飞控模拟器通过网络直接与飞控中心数字仿真网连接,接收遥控和注入数据(不经过调制),产生遥测(不经过调制)和星历数据.同时通过网络接收火箭发射、星箭分离等信息,响应数字仿真服务器的加速、跳时、停止等命令.两种模式的选择和切换由数字仿真系统进行控制,如图2所示,其中模式1为与USB测控站配合使用模式,模式2为网络模式:
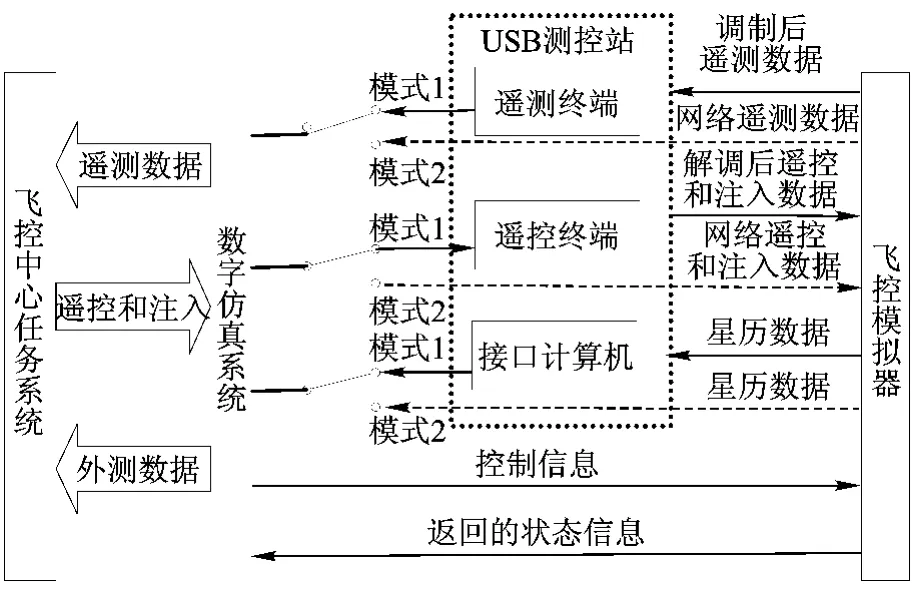
图2 嫦娥一号飞控模拟器的使用模式
2.4 加速跳时设计
为了使模拟器能够配合飞控中心进行压缩演练并保证系统之间的同步,模拟器必须具备加速跳时功能.但是以往模拟器的跳时不允许跨越轨控过程.这对于嫦娥一号卫星任务来说,非常不方便,几乎是无法实施的.因为490 N发动机所需的轨控过程大约为80 min,如果要演练环月段的飞控过程,之前要经历10~11次机动,至少需要13 h时间.所以为了使演练能跨越轨道段,模拟器新提出了带轨道根数的跳时功能.它与普通跳时的区别是跳时信息除了时间信息外,还包含卫星质量、姿态、跳时后的轨道根数等信息.跳时的时间处理与普通跳时相同,只对年、月、日、时、分信息进行处理,秒时间以时统板送来的秒信号为准,以保证时间同步精确到毫秒量级.
3 高精度动力学模型
如何准确、方便地定制航天器各子系统模型,轨道模型,姿态模型以及测控网模型直接决定了模拟器的保真程度.各个国家也相继提出一些建模标准,如欧空局的SMP(Simulations Model Portability)标准,采用插件和模型驱动结构,并基于UML和XML公开标准[8].市场上的软件供应公司,也纷纷推出符合新标准的软件工具,如SMI(Simulation Model Interface).有些图形化模型工具可以在通用模型的基础上进行用户定制,大大方便了模拟器的研制.
为了提高保真度,模拟器建立了高精度轨道动力学模型,并直接嵌入了GNC分系统的星载软件,而有效载荷、数管等其他保真性要求较低,而且需要不断升级的子系统被设计成通用模型,用户可以通过任务常数和配置文件进行定制.
3.1 高精度轨道动力学模型
嫦娥一号卫星的轨道不同于近地卫星轨道,当卫星靠近月球时,月球引力不能仅作为摄动力考虑,而必须作为主要引力.本文将地球-航天器-月球三体问题分解为两个受摄二体问题,以月球影响球为界进行拼接.根据嫦娥一号卫星轨道设计,嫦娥一号卫星的轨道包括发射段、调相段、地月转移段、月球捕获段和环月运行段.
3.1.1 发射段弹道仿真
嫦娥一号卫星由长征三号甲运载火箭发射入轨,所以飞控模拟器发射段弹道仿真的实现方法是直接装订长征三号甲运载火箭的弹道文件,通过插值计算,按每秒一点的频率输出星历.
3.1.2 地心段轨道模型
地心段轨道考虑的摄动因素有地球非球形引力摄动,日月引力摄动,大气阻尼摄动和太阳辐射压摄动,月球和太阳的星历采用DE405,建立如下运动方程:
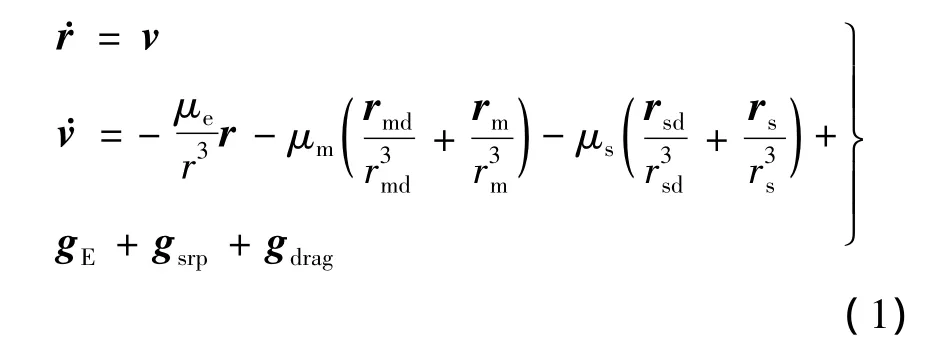
其中,μe,μm和 μs是地球、月球和太阳的引力常数;rm,rs和r分别为月球、太阳和卫星相对于地心的矢径;rmd和rsd分别表示卫星到月球和太阳的矢径;gE为地球非球形摄动;gsrp为太阳光压摄动;gdrag为大气阻尼摄动,相应的计算公式可参见文献[9].
3.1.3 月心段轨道模型
月心段轨道考虑的摄动因素有月球非球形引力摄动,日地引力摄动和太阳辐射压摄动,运动方程为
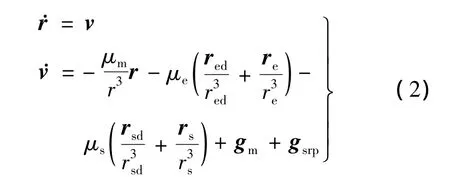
其中,re,rs和r分别为地球、太阳和卫星相对于月心的矢径;red表示卫星到地球的矢径;gm为月球非球形摄动.
月球引力场模型采用目前精度相对较高的美国喷气推进实验室(JPL)利用基于月球勘测者(LP,Lunar Prospector)探测器为止所有的观测数据解算出来的LP165模型.
3.2 GNC子系统功能仿真
GNC子系统负责姿态控制以及敏感器和驱动机构的功能仿真,其仿真的真实性直接决定了姿态动力学仿真的精度.为了真实地模拟卫星的各种姿态和控制逻辑,首次在模拟器中嵌入了GNC子系统的星载软件,运行于GNC实时仿真计算机.同时,由于星载轨道动力学采用的是二体模型,精度很低,只能进行短时间轨道外推.为了提高轨道外推的精度,采取的方法用高精度轨道动力学模型同步进行轨道计算,运行于轨道仿真计算机,定期刷新实时仿真的轨道参数,同时下装外部控制策略,如图3所示.
GNC实时仿真包括动力学仿真单元和控制律仿真单元,采用了实时多任务操作系统.最小运行周期可以精确地设定到32 ms,按卫星的控制周期运行和切换.实时仿真定时发送姿态信息和发动机信息给高精度动力学仿真,产生的遥测信息送给遥测遥控计算机进行遥测采集和组帧.Windows操作系统下的调度计算机、轨道仿真计算机和遥测遥控计算机采用了策略组态软件、数据通讯软件和操作显示界面软件,实现了精确轨道根数、仿真控制策略的修改和在线下装给实时系统的要求.这种方法实现了高精度的控制律计算,从而实现了高保真的GNC子系统功能仿真和高精度姿态动力学仿真.
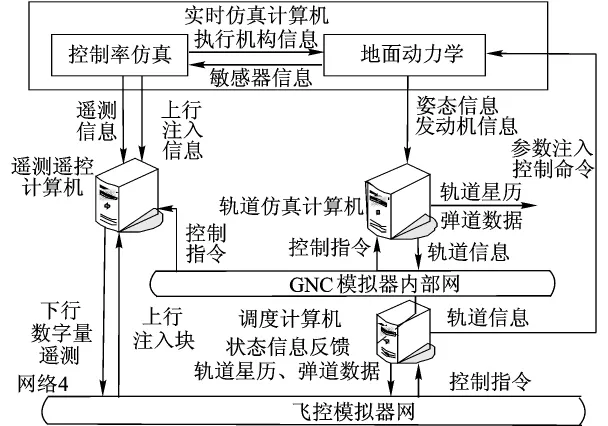
图3 轨道和姿态信息交互方式
3.3 通用模型设计
为了方便用户修改和升级,嫦娥一号飞控模拟器将有效载荷、数管等一些经常需要进行更新的子系统设计成通用模型,用户可以通过任务常数和配置文件进行定制.这种方法使得卫星状态变化后不需要修改程序,只需要修改相应的配置文件后重新加载就可以升级.仿真主控计算机提供这些配置文件的管理和修改的人工维护界面.
4 系统实现与仿真
4.1 系统实现
模拟器的软件采用了插件式体系结构,各个功能模块用插件的形式加入.插件是一种非常灵活的部件式结构,它改变了传统软件单一的执行程序模块的方法,将固定的功能模块转移到插件中实现,每个插件可以单独开发,能够在系统运行时动态插入,并且可以被自由地删除和替换.功能模块间的耦合度很小,仅仅通过规定的接口进行数据和信息的交换,只要接口保持不变,一个模块的软件变动不会影响其他功能模块.这使得模拟器的软件具有较强的可扩展性和可伸缩性.如图4所示,模拟器的各个功能模块分布运行在各台计算机上.
嫦娥一号飞控模拟器专门设计了一台仿真主控机,通过网络调度各个功能模块,负责整个飞控模拟器的操作控制、状态设置、运行管理和页面监视.不再需要几个操作人员同时进行操作和监控,图形化的人机界面使得操作非常简单方便,一个人就可以完成所有的操作.模拟器启动后还可以由实战任务系统的信息直接进行驱动,实现了无人值守的能力.

图4 嫦娥一号飞控模拟器
4.2 仿真效果
嫦娥一号飞控模拟器研制成功后到任务执行前,利用该模拟器,飞控中心先后组织完成了发射段、入轨段、调相段、转移段的轨道控制及环月段轨道维持等测控系统演练和飞控协同演练,取得了很好的演练效果.
在演练中对飞控模拟器生成的遥测数据与真星对接时真星生成的遥测结果进行了比较,确认模拟器对遥控指令和注入数据的响应正确.通过模拟器输出的星历数据可以直接验证轨道动力学的精度.为了评估姿态动力学的精度,除了用从遥测数据解算的姿态参数和调姿曲线等页面进行监视确认外,对轨控过程的实际姿态轴与目标姿态轴的偏差进行了计算,如图5所示为第1次远地点利用490 N发动机,采用有限推力方式抬高近地点的轨道机动过程,可以看出偏差很小,说明卫星的轨道和姿态动力学仿真精度达到了要求.
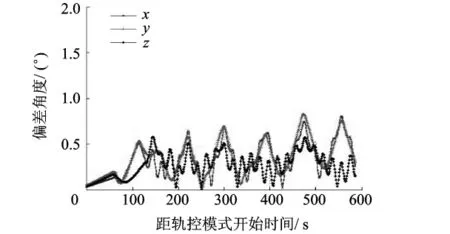
图5 使用飞控模拟器演练第1次远地点变轨过程的实际姿态轴与目标姿态轴偏差
5 结论
嫦娥一号飞控模拟器实现了数管、GNC等卫星重要分系统的功能仿真,完成了遥控指令和注入数据的正确响应、遥测功能仿真、高精度轨道动力学和高精度姿态动力学仿真,与飞控中心实战任务系统构成了天地一体化验证环境.首次提出了带轨道根数跳时的新方法,提高了任务演练的灵活性.模拟器以月球影响球的作用范围为界,分段建立了高精度轨道动力学模型,并在模拟器中首次直接嵌入部分星载软件,大大提高了模拟器的保真度.同时模拟器的集中监控软件解决了操作人员分散,操作流程复杂的问题,大大方便了用户的操作和管理,也实现了飞控模拟器与飞控中心实战任务系统的无缝连接.该模拟器在嫦娥一号卫星任务准备中得到了充分的应用,有效地验证飞控实施方案的有效性和完备性,为嫦娥一号卫星任务的圆满完成奠定了坚实基础.
目前飞控中心针对不同的任务需要研制不同的模拟器,而且模拟器基本上是一次性使用,重复利用率很低,导致研制成本很高.而国外的模拟器,不仅直接使用部分星载软件和地面软件,有些软件模块还可以重复使用,因而大大降低了模拟器的研制成本.因此,在我国未来任务的模拟器开发中,需要进一步提高模拟器的模块化设计,提高模拟器的重复使用率,降低开发成本.
另外,我国的模拟器至今还没有统一的标准,很多模拟器模型虽然功能相同,但相互之间格式和接口都不兼容,无法重复使用,建议今后在仿真模型标准化方面也设立相应的标准.
References)
[1] Reinholtz K.Applying simulation to the development of spacecraft flight software[C]//Aerospace Conference.Montana:IEEE,1999:469-476
[2] Martin J E,Lowe R,Osborne J J,et al.Successful application of new technologies to the Rosetta and Mars Express simulators[C]//Proceedings of DASIA 2002.Dublin:ESA,2002:1-11
[3] Ambrosio A M,Cardoso P E,Orlando V,et al.Brazilian satellite simulators:previous solutions trade-off and new perspectives for the CBERS program[C]//9th International Conference on Space Operations.Rome:AIAA,2006
[4] Casella F,Lovera M.High-accuracy orbital dynamics simulation through keplerian and equinoctial parameters[C]//6th International Modelica Conference.Germany:Modelica,2008:505-514
[5] Reggestad V,Guerrucci D,Emanuelli P P,et al.Simulator development:the flexible approach applied to operational spacecraft simulators[C]//SpaceOps 2004.Canada:AIAA,2004
[6] Sebastião N,Reggestad V,Verrier D.ESOC simulators:past,present and future[C]//OPS-G Forum.Germany:ESA,2008
[7] ESA/ESOC.Simulators designer guide for performance issues[R].DOPS-STU-TN-1002-OPS-GD.TN1,2011
[8] Rodrigues V,Lopes J C,Moreira A.An hybrid design solution for spacecraft simulators[C]//Proceedings of the Forum at the CAiSE'08 Conference.Montpellier:CEUR,2008
[9]刘林.航天器轨道理论[M].北京:国防工业出版社,2000 Liu lin.Spacecraft orbital theory[M].Beijing:National Defense Industry Press,2000(in Chinese)
