基于视频序列图像的车辆测速的实现方法
2013-10-31林柏林
林柏林
(湖北第二师范学院 机电系,湖北 武汉 430205)
0 引言
随着我国经济的发展,道路运输已经取代铁路成为最重要的运输方式之一,目前我国公路建设规模不断扩大,如何有效的对交通环境进行监管是当前面临的一个重要问题,而“车辆测速”作为交通监管的重要部分受到了人们的广泛重视。
文中通过连续两帧序列图像测定目标车辆的车速,通过运用图像处理技术对视频帧图像中的车辆进行定位,运用车道划分、车辆定位判别的思想提高测速的精度,作为一种描述行车拥堵程度的车流平均速度,通过多次或多车的测试来提高其测量准确度。
1 测速原理
1.1 摄像机定位
摄像机、车辆、隔离带平面位置如图1所示。文中模拟道路移动测速装置的使用对摄像机进行定位[1-2],路面划分为1、2车道,h为摄像机的高度,d为摄像机距离车道的距离。
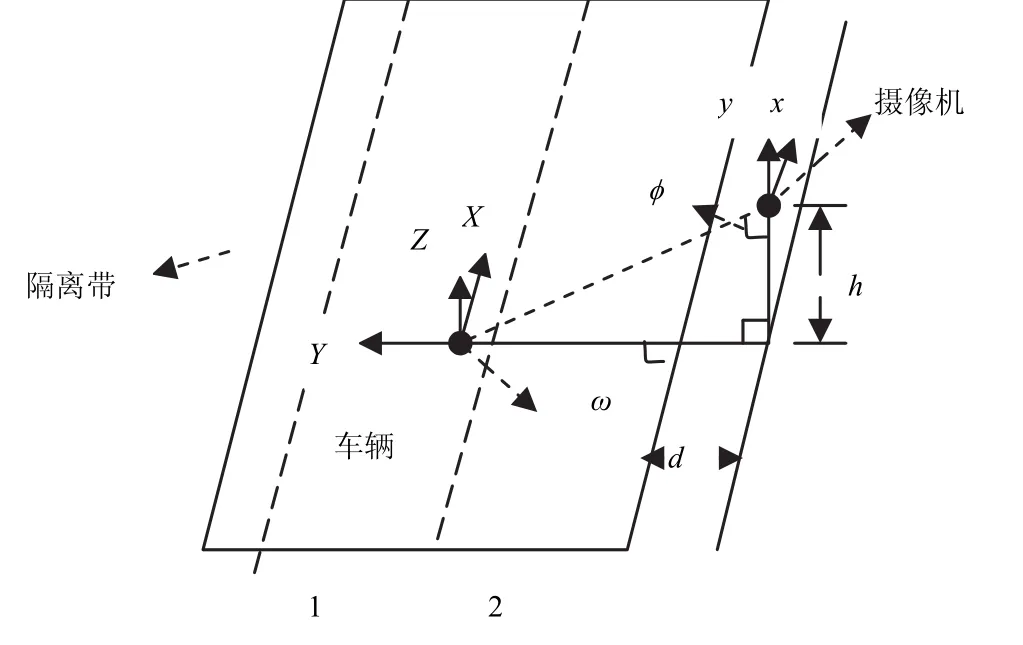
图1 摄像机位置与拍摄示意
1.2 基本原理分析
基于视频序列图像的车速检测主要是根据对帧间隔固定的序列图像的分析处理来实现车辆速度的测定[3],对于摄像机中摄录的视频图像有如下特点:
1)帧间隔固定的两帧序列图像间时间间隔相同。
2)帧间隔固定的的两帧序列图像有相对移动。
根据物理学公式目标的运动速度:

根据视频信号的固定的两帧连续图像的间隔时间和间隔帧数目,正如图2所示,可以计算出时间ΔT,而通过车辆目标的位置检测,可以得到车辆的相对位移距离ΔS,利用上述公式计算出速度v。
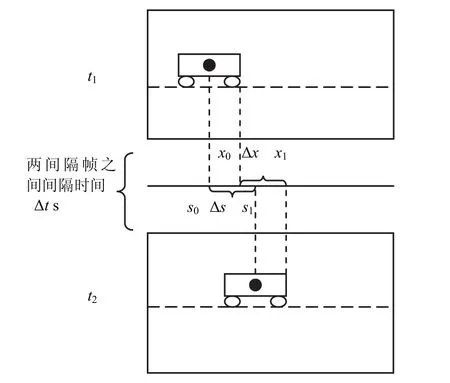
图2 测速原理示意
1.2.1 比例系数估算
为求出目标车辆的实际行驶速度,可假设一个比例系数 e,单位为“米/像素”。此为视频序列图像中每个像素点和实际道路长度“米”之间的对应关系。
下面先探讨摄像机的视角问题[4-5],如图3所示。
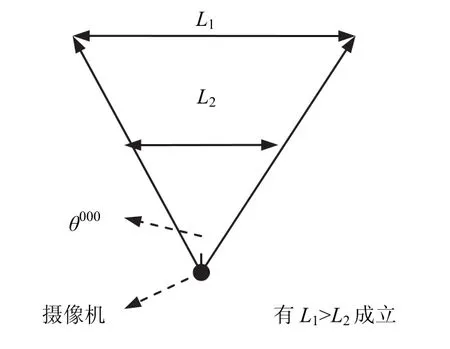
图3 摄像机拍摄视角示意
从图3可见,摄像机由于存在一个视角θ,会使得距离摄像机较远的道路长度L1(单位为“米”)实际上大于距离摄像机较近的道路长度L2(单位为“米”)。假设视频序列图像的宽度为n(单位为“像素),则有式 (2)成立:

因此,若有两个目标车辆object1与object2,则离摄像机远的object1和离摄像机较近的object2的速度有Vobject1>Vobject2成立。
相对于此,若将object1与object2作为相同的移动目标看待,会出现一定的误差。文中用如下方法来解决。
如图4所示,将图像划分成上下两个部分,上半部分为天空,和街边景物,而道路处于图像的下半部分,将下半部分视为有效区域。而道路区域的划分为实际序列图像的车道划分,如图5所示。
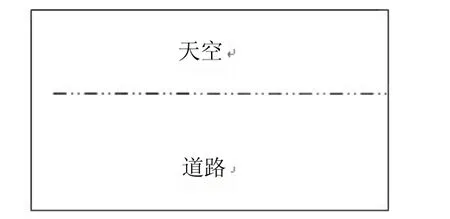
图4 道路与天空划分示意
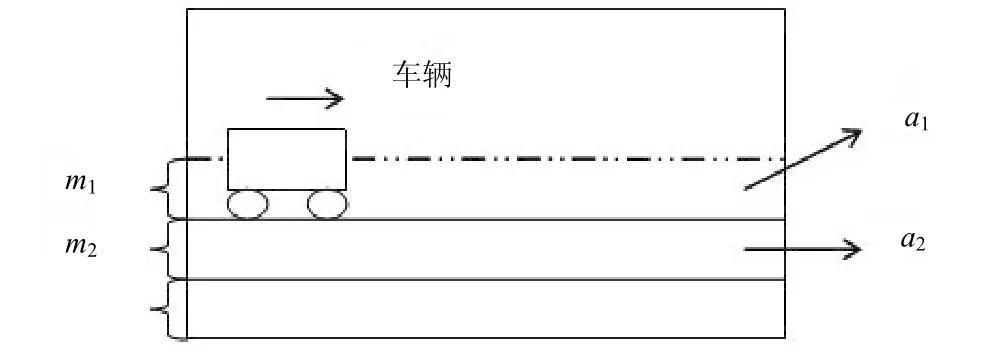
图5 道路区域划分示意
将上述道路划分区域后,对于a1、a2这两个区域分别赋予一个比例系数 e1、e2,用这两个比例系数分别表示两个不同区域的“实际距离与像素的比”,单位为“米/像素”。
1.2.2 速度算法分析
在对于各个参数分析的基础上,可以获取到用于目标车辆测速的各项数据。首先设法精确的计算出间隔时间Δt的两帧视频序列图像中目标车辆的形心位置或车头点位置的相对移动距离,可用相对移动的像素个数来表征,记为Δp。文中选用摄像机的拍摄速率设定为30 b/s,因此相邻两帧序列图像的间隔为xs=1/30s。另外可以设定摄像机摄录的视频序列图像的间隔帧数为sum帧,比例系数ex的取值由x所处的区域位置确定,利用下面式(3)计算出目标车辆的实际行驶速度。

2 系统的定位实现
2.1 背景减法简介
视频测速是把视频短片转换为图片帧,然后通过图像处理检测运动目标。对于序列图像中利用信号检测的方法自动分离出运动像素点和静止像素点。目前比较流行的运动区域检测方法可以分为:模版匹配、光流、时间差分、背景减除法[6]。图 6为背景减法流程。
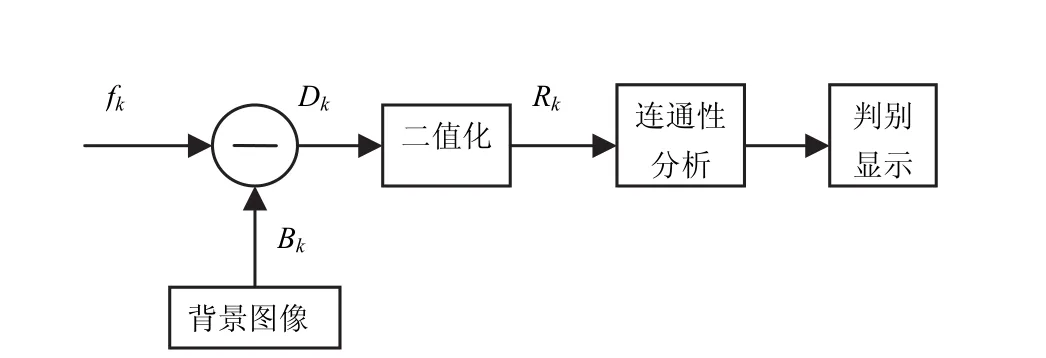
图6 背景减法流程
2.2 目标检测的主要步骤
目标检测的主要步骤如下:
1)将两个方向模板的一个像素移到另一个像素,使得中心像素与图像中的某个像素位置重合。
2)将对应的图像像素值和模板内的系数相乘。
3)将乘积进行相加。
4)模版中心位置的像素的新灰度值取两个卷积的最大值。
5) 若像素新灰度值超过阈值,则可确定该像素点是边缘点。
3 实验结果
3.1 图像定位
文中用30b/s的速率拍摄目标车辆的视频序列图像。图7为目标定位流程图。
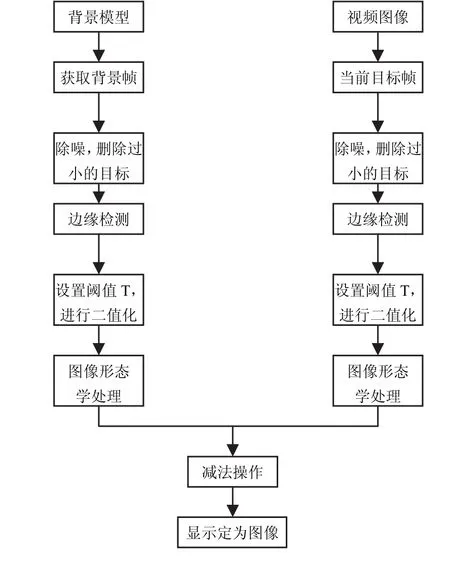
图7 目标定位流程
表1 给出了目标车辆的像素位移与实际位移,而表2给出车辆的实际运动速度和正确速度的误差。
3.2 数据处理
如表1所示,通过定位图片得到间隔帧图像[7]的像素位移,由原理分析部分以及汽车所在车道得到的像素与实际距离的对应关系e=0.0278 m/像素,得到车辆间隔帧实际位移。表2 为目标车辆速度测定结果。

表1 目标车辆位移测定

表2 目标车辆速度测定结果
对误差大小作如下定义:

用相同的方法再对不同的车辆进行测速,求得均值即可得到路段交通流数值。
4 结语
总的来说,使用视频测速从理论上来说可达到很高的测速精度,能满足道路交通对于交通车辆的管理和检测[8]。但是在具体应用中会受到天气和道路划分的限制。另外测速用的摄像头也可以作为城市警用系统的监控设备,一机二用,提高设备的使用效率。在今后的工作中,可以考虑在识别车辆类型的同时通过确定车辆的实际长度和车辆所占像素个数的比例来确定比例系数e,这是下一步工作的重点。
[1]高浩军,杜宇人.基于视频序列图像的车辆测速研究[J].电子测量技术,2007,30(02):40-45.
[2]CHAUSSE F, AUFRERE R,CHAPUIS R.Recovering the 3-D Shape of a Road by On-board Monocular Vision[J].Proc. 15th Int. Conf. Pattern Recognition,2000(01):325-328.
[3]樊秋月.基于彩色视频图像处理的小区监视及人数统计[J].通信技术,2010,43(07):187-189.
[4]LAI A,YUNG N. Lane Detection by Orientation and Length Discrimination[J].IEEE Trans. Syst., Man,Cybern.B,2000(30):539-548.
[5]MOHAN A, PAPAGEORGIOU C. Example-based Object Detection in Images by Components[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2001,23(04):349-361.
[6]张志付.基于背景减法的运动检测算法研究[D].上海:上海交通大学,2008.
[7]张怡,冯飞,宋冠群.基于FPGA的图像预处理缩放算法[J].信息安全与通信保密,2007(01):77-78,81.
[8]孙秀敏,杨新,杜啸晓.基于小波变换的视频压缩的硬件实现[J].通信技术,2001(06):100-102.
