电液速度控制系统的自适应控制
2013-10-29王青林黄曼霞
王青林,黄曼霞
(1.商丘技师学院,河南 商丘476000;2.商丘职业技术学院,河南 商丘476000)
电液速度控制系统在实际工程控制系统中应用非常广泛[1-3],如雷达天线控制系统、六自由度转台速度控制系统、火炮速度控制系统以及用稳定平台速度控制系统等较大功率的控制系统中都采用电液控制系统[4]。速度控制系统的控制对象是系统的输出速度。在电液速度控制系统中,通过速度传感器,将系统的输出速度反馈到系统输入端,构成速度控制回路,如图1所示。

图1 电液速度控制系统原理图
液压速度控制系统通常有液压缸输出速度控制系统和液压马达转速控制系统,就液压马达转速控制系统而言,电液速度控制系统的控制方式主要有阀控液压马达速度控制系统、泵控液压马达开环速度控制系统、泵控液压马达闭环速度控制系统和位置开环泵控液压马达闭环速度控制系统等典型的电液速度控制系统[5-7],其开环传递函数为:

由上式可知,该系统为零型有差系统,输出速度偏差随速度的增大而增大,这说明不能由位置系统简单地用速度反馈来实现速度控制,会导致速度偏差的问题,甚至使系统变为不稳定或稳定裕量较小。
1 电液速度控制系统与希望模型
设某典型的电液速度控制系统,它的开环传递函数如式(1)所示。式(1)中:K0=20,ωh=165,ζh=0.1。
取满足希望动态性能指标的希望模型的闭环传递函数为:


式中:Km=1,ωm=173.2,ζm=1.8764。
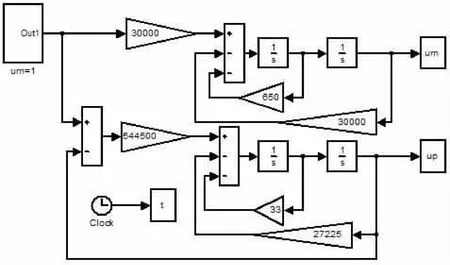
图2 液压速度控制系统及希望模型SIMULINK仿真模型

图3 液压速度控制系统及期望模型SIMULINK仿真模型
闭环后的电液速度控制系统及希望模型SIMULINK仿真模型如图2所示。在方波信号作用下,其输出响应如图3所示。
由图3仿真曲线可知,速度控制系统尽管稳定,但其稳定性很差,稳定裕度很小,系统的阶跃响应曲线在初阶段产生激烈的振荡,过渡过程时间较长,并且系统存在一定的输出速度误差。
2 自适应控制器的设计


取自适应广义误差为:

被控系统的控制输入为:

参数调节规律为:

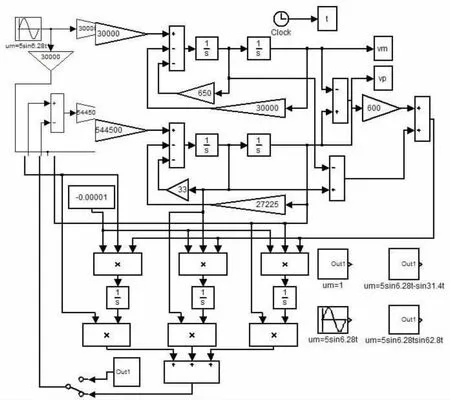
图4 电液速度自适应控制系统SIMULINK仿真模型
3 电液速度自适应控制系统的仿真试验研究

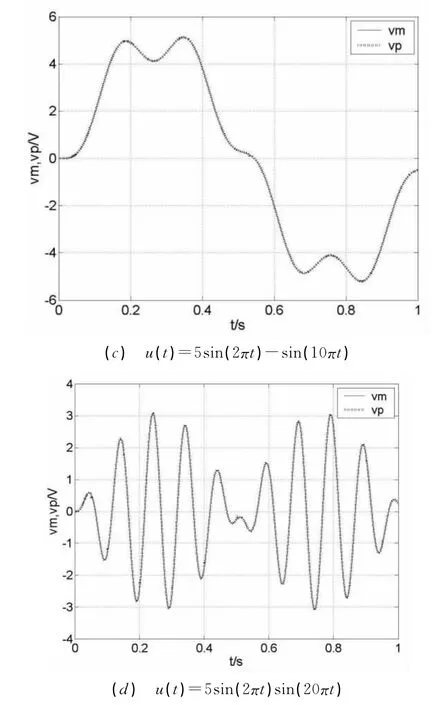
图5 电液速度自适应控制系统在不同信号作用下的输出响应曲线
根据上述电液速度自适应控制器的设计,可以作出电液速度自适应控制系统的SIMULINK仿真模型,如图4所示。该电液速度自适应控制系统在不同输入信号作用下的输出响应如图5所示,系统动态特性得到极大的改善。
4 结论
1)由于电液速度控制系统是零型有差系统,输出速度偏差随速度的增大而增大,这说明不能由位置系统简单地用速度反馈来实现速度控制,这不但存在速度偏差的问题,还可能使系统变为不稳定或稳定裕量较小。
2)本文根据误差方程多项式代数法设计自适应控制器,构成电液速度自适应控制系统,控制算法简单,有利于在线控制。
3)通过输入不同控制信号进行仿真研究,可知该电液速度自适应控制系统控制效果良好,被控系统一致地收敛希望模型的输出,使之满足系统要求的动态性能。
[1]Katsuhiko Ogata.现代控制工程[M].3版.卢伯英,于海勋,译.北京:电子工业出版社,2000.
[2]王积伟,陆一心.现代控制理论与工程[M].北京:高等教育出版社,2003.
[3]吴振顺.变结构自适应控制器及其在液压伺服系统中的应用[J].机械工程学报,2000,36(5):107-110.
[4]熊汉文,付忠辉等.单片机控制的智能PID控制器在液压系统中的应用[J].机床与液压,2001,170(2):42-43.
[5]韩俊伟.机电液控制系统仿真与CAD[M].哈尔滨:哈尔滨工业大学出版社,2006.
[6]张键成.控制理论基础与应用[M].哈尔滨:哈尔滨工业大学出版社,2007.
[7]吴振顺.液压控制系统[M].北京:高等教育出版社,2008.