基于WIFI无线区域定位的精确度影响因子研究﹡
2013-10-27常晓洁江肖强
常晓洁, 江肖强
(浙江大学 图书与信息中心,浙江 杭州 310000)
0 引言
在无线网络技术及应用不断发展成熟特别是WIFI覆盖范围日趋广泛的今天,定位技术也显得越来越重要,尤其区域定位技术。现如今已有的无线定位技术主要有 TOA基于电磁波传播时间的定位技术;AOA基于电波入射角的定位技术;TDOA基于电磁波到达时间差的定位技术[1];以及基于信号强度RSSI的定位技术等。但是无论采用何种类型的定位技术都不可避免的会有误差,如何尽量降低定位误差,提高定位精确度?提高定位精度首先要明确的就是有哪些因素将会影响到区域定位,然后才能在建立信号传播模型时将这些因素考虑进去进行修正,最后在设计定位算法时尽可能降低这些因素对定位精确度的影响。区域定位的主要误差来自于移动终端与AP之间信号的无线传播环境的影响,其次是由室内定位系统中最重要的模块定位算法导致的误差以及各种移动终端信号接收强度的差异性引起的定位误差。文中将主要研究WIFI无线传播环境中的影响因子包括信号传播过程中的衰减、非视距传播(NLOS,Non Line of Sigh NLOS)、电子设备的信号干扰以及接收端定位采样时的位置引起的信号接收误差,其中以NLOS引起的误差最为严重。这些误差在室内环境下虽不可完全避免但可通过进行一系列的实验和优化定位算法进行最大程度的减小。
1 影响室内定位因素
无线信号传播环境中存在的影响定位精确度误差的因子主要有非视距传播NLOS和视距干扰LOS如穿透障碍物造成的信号衰减、电子设备的信号干扰、移动物干扰、测量时的移动误差、定位系统自身误差等,其中最为主要的定位影响因子是NLOS,NLOS可以通过建立相应数学模型进行消减,其他误差在固定的环境中可以通过进行多次仿真试验采集海量数据将误差降到最低。下面将主要对非视距传播NLOS进行研究。
室内环境下无线波由 AP到达移动终端的过程中,会因传播环境中各种静止或运动的物体使无线波产生非视距传播NLOS[2]如反射、绕射、散射等,最终导致以不同的路径到达接收端,这种现象称为多径传播(MPP,Multipath Propagation),如图1所示。
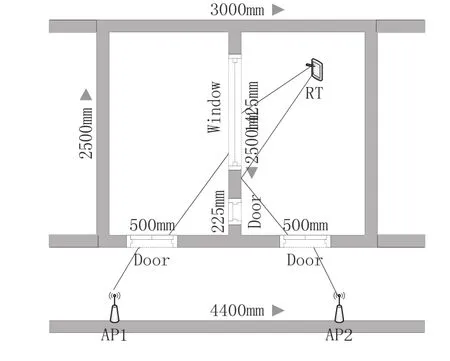
图1 多径传播示意
由于这些信号是经过不同传播路径到达接收端的,不同的传播路径到达接收端有不同的到达时间、到达角度和相位,同时这些信号之间是相互独立的,接受端接收信号时对这些相互独立的无线波进行向量叠加合成一个整体的接收信号强度值。多径传播的信号在接收端进行向量叠加使接收到的信号强度与无线波的相位有关,从而会出现移动终端接收无线信号时出现忽大忽小不稳定的振幅波动。经试验研究一般振幅在20 dB和30 dB左右波动变化。
抑制非视距传播NLOS对定位的影响将是十分必要的。通过对定位环境进行NLOS建模,即经过多次实验测量在NLOS传播时的距离偏差,然后结合相应修正算法对NLOS传播测量进行校正,最后将定位结果校正到实际距离测量附近。
2 区域定位影响因子的修正算法
NLOS误差是无线定位误差的主要来源。它使测量结果发生正向偏差,从而导致定位结果产生很大误差。
目前已有的NLOS误差消除方法可以分为直接法和间接法两种[3]。直接法是通过考察NLOS误差的统计特性,找出测量值与真实值之间的误差关系以及偏离度,并对测量值进行处理以恢复出真实值。间接法则是把消除测量值中的NLOS误差与定位算法结合[4],通过设计优化定位算法,减小NLOS误差对定位结果的影响。下面将对两种常用定位算法进行优化以适应NLOS和LOS影响不同的WIFI无线信号传输环境。
2.1 GRBF误差修正算法
由于反射体均匀分布在以选择的RBF函数中心为圆心,半径为r的圆周上,因此可在建立基于几何结构单次反射统计信道模型GBSB上的利用RBF神经网络逼近非线性连续有理函数对RSSI测量数据及定位初步结果进行修正,以减少NLOS 对定位结果的影响。
首先初始化网络,输出一些小的随机权值;然后提交一个输入向量,并按:

计算输出,之后采用RBF神经网络学习方法[5]递归输入参数:
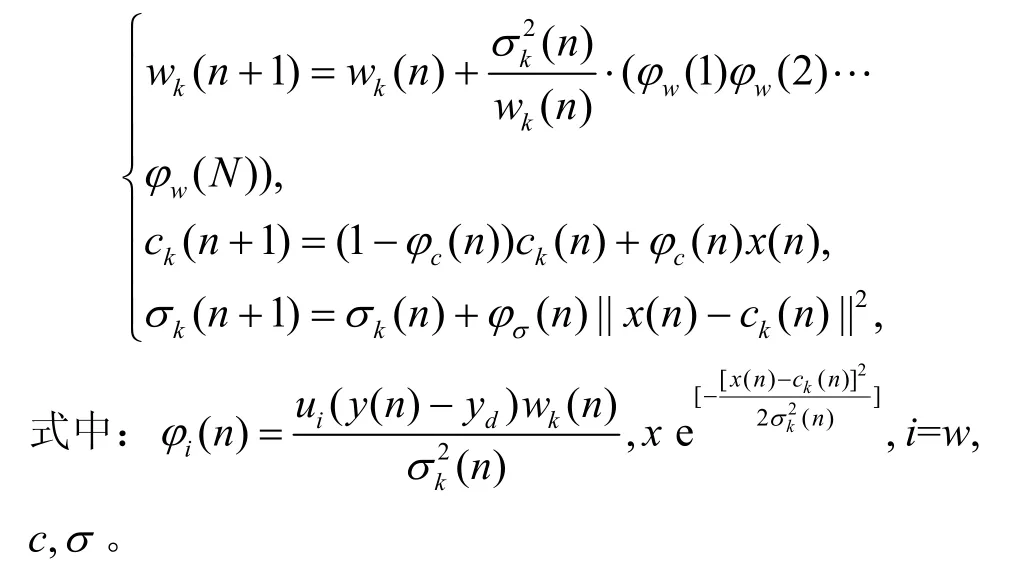
经过RBF神经网络学习算法不断递归直至网络收敛完成。然后用完成的RBF神经网络对测量数据进行修正,通过式(1)计算输出值。
2.2 V-OBTL误差修正算法
V-OBTL误差修正算法是利用移动终端的速度和方向信息,根据移动终端运动方程并结合OBTL算法[6]得到移动终端的初步定位结果估计值0P。计算 P0( x0,y0)与各AP节点BI( xi,yi)之间的距离d0i[7](i= 1, 2,3,i为AP个数,由于采用三角定位算法,所以i值最大为3,再根据测量得到的到各AP的RSSI测得值算出的移动终端到各AP之间的距离, 选择最小时所对应的AP为受NLOS 影响最小的AP节点[9],坐标设定为B1,相应距离信息测量值为d。利用0P、B1以及距离信息d经过比例运算得到移动终端的位置信息 PL( xL,yL)。
最后通过以下比例关系式可得出PL:

3 修正算法仿真及分析
在WIFI无线网络环境中,实际测量到的大多仅仅是RSSI值,如何尽可能的消减WIFI区域定位中由非视距传播NLOS和视距传播LOS产生的误差显得尤为困难和重要。本次试验将分析 GRBF和V-OBTL两种修正误差算法在结合三角定位算法时适合应用的环境及对应精确度。本次试验的环境将按照NLOS影响概率大小分为区域C 50%、区域B 30%、区域A 15%。在整个区域中每隔2米选取一个采样点,共采集45个采样点,将每个采样点对应的坐标(xi, yi)、采样点与AP夹角及在此采样点采集到的3个AP的RSSI值输入建立的指纹库。之后的试验将采样到的数值使用MATLAB首先结合RSSI强度的衰减模型[10]并通过三角定位算法[11]算出未知坐标( xg,yg)集合,经GRBF和V-OBTL误差修正算法后得出定位坐标( xL,yL)。
(1)影响因子修正算法定位精度分析
在区域A和区域B和区域C进行移动采值,经反复多次采样,并通过基于GRBF和V-OBTL修正算法仿真得到的定位结果如2和图3所示。
通过对比图2与图3的定位结果可发现在进行移动定位时V-OBTL修正算法明显优于GRBF修正算法,对于V-OBTL算法NLOS影响概率高的区域如区域C相对NLOS影响区域概率较低的区域如区域A和区域B定位的精确度更高。
图4所进行的采样是在固定点进行采样,在某一点采样完毕再移动到下一采样点进行固定采样,通过比较可发现V-OBTL修正算法和GRBF修正算法各有千秋,在NLOS影响概率较高区域如区域C,V-OBTL定位精度稍优于GRBF,而在NLOS影响强度较低的区域 A和区域 B,GRBF精度稍高于V-OBTL。

图2 V-OBTL定位轨迹

图3 GRBF定位轨迹

图4 V-OBTL与GRBF固定点定位
由以上对比可得出V-OBTL修正算法更适用于NLOS影响概率更高且在移动过程中定位的环境下,而GRBF修正算法适用于NLOS影响概率较低且可进行固定采样的环境下。
(2)定位误差均方根误差比较


图5 环境一下定位误差均方根
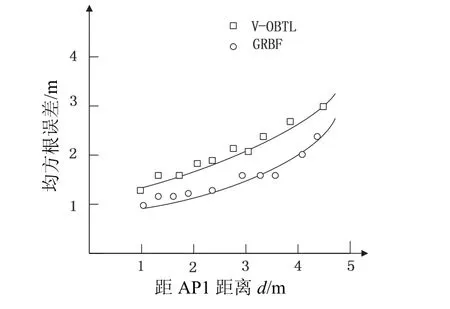
图6 环境二下定位误差均方根
4 结语
文中主要研究了在区域无线定位中定位技术精确度的影响因子,并分析消减各影响因子的方法,针对LOS传播影响因子[12]如穿过障碍物信号衰减、电子设备信号干扰、定位系统本身误差则需要在实际实验环境中根据多次反复测量计算影响因子的值,并估算出误差范围来消减影响因子的影响。文中主要总结归纳了并对比分析了两种消减由非视距传播产生的NLOS误差的算法,采用三角定位算法进行定位,并利用V-OBTL和GRBF两种优化的修正算法进行NLOS的消减,由此分析出在通常的两类WIFI无线环境下应优先使用的修正定位算法,依次降低NLOS误差对定位精度的影响,将区域定位误差平均控制在3 m以内。
[1]张毅,郭华,罗元.无线定位估计的信息融合模型研究[J].信息安全与通信保密,2006(12):80-82.
[2]MAZUELAS S, LAGO F A, BLAS J,et al.Prior NLOS Measurement Correction for Positioning in Cellular Wireless Networks[J]. IEEE Transaction on Vehicular Technology,2099,58(05):2585-2591.
[3]CASAS R, MARCO A, GUERRERO J J, et al.Robust Estimat or for Nonline of Sight Error Mitigation In Indoor Localization[J].European Association for Signal Processing Journal on Applied Signal Processing,2006,6(02):156-163.
[4]LIN C H, CHENG J Y, WU C N.Mobile Location Estimation Using Density based Clustering Technique for NLOS Environments[J].Cluster Computing, 2007,10(01):3-16.
[5]毛永毅,李明远,张宝军.一种 NLOS 环境下的 TOA/AOA定位算法[J].电子与信息学报,2009,31(01):37-40.
[6]VATHSANGAM H,TULSYAN A,SUKHATME G S.A Data-driven Movement Model for Single Cellphone-based Indoor Positioning[C]//2011 International Conference.Dallas TX: Body Sensor Networks,2011:174-179.
[7]方海涛,雷菁,胡昆明,等.基于RSSI修正的改进DV-Hop测距算法[J].通信技术,2012,45(02):16-18.
[8]陈昌祥,达维,周洁.基于RSSI的无线传感器网络距离修正定位算法[J].通信技术,2011,44(02):65-69.
[9]朴云,董利达,丁力.能够克服局部 NLOS 影响的自主移动节点定位方法[J].浙江大学学报:工学版,2011,45(07):1147-1153.
[10]陈岭,许晓龙,杨清,等.基于三次样条插值的无线信号强度衰减模型[J].浙江大学学报:工学版,2011,45(09):1521-1527.
[11]林玮,陈传峰.基于 RSSI 的无线传感器网络三角形质心定位算法[J].传感器技术,2009(02):180-182.
[12]蒋杭佑,冯燕.基于无线传感器网络的声目标定位算法研究[J].信息安全与通信保密,2010(06):54-57.
