TCAS防撞系统空中故障分析
2013-10-27廉佳
廉 佳
(海军装备部,陕西 西安 710089)
1 引言
空中交通告警和防撞系统(TCAS,Traffic A-lert and Collision Avoidance System),它是一种不依赖于地面空中交通管制系统而为飞机提供防撞保护的机载设备,可以提醒机组对附近飞行的飞机实施警告,发出咨询信息,以便引导机组目视观察或根据“行动咨询”指引或飞行员自主采用“高度差”方式进行垂直飞机机动以避免潜在的碰撞。TCAS是提高飞机飞行安全的重要机载设备之一。
在某型飞机上新加装的TCAS防撞系统属于ACASII机载防撞系统,在进行功能试飞的过程中,飞行员反应TCAS防撞系统在空中工作不稳定,交通/决断显示器上显示“TCAS OFF”的故障。本文简要叙述了设备的工作原理,重点对产生故障的原因进行了分析,并就如何排除故障进行了介绍。
2 TCAS防撞系统基本原理
TCAS防撞系统的ACAS收发主机通过控制天线波束指向,对飞机前、后、左、右4各区域进行扫描询问,探测在信号覆盖范围内的飞机,如被探测到的飞机(目标机)装有S模式或A/C模式空中交通管制雷达信标系统应答机,则目标机就会作出应答,ACAS收发主机根据收到的应答信号,获得目标机的高度、高度变化率、相对距离、相对距离变化率、方位等目标信息,同时监视、跟踪目标,建立、更新和维护目标系统航迹,以判断这些飞机是否存在于本机发生碰撞的可能,如果存在,系统就向飞行员输出警告信息,并向飞行员提供操纵的决断命令,能够实现飞机空中垂直避让的功能。
TCAS防撞系统将监视和跟踪的目标航迹与本机信息综合,评估出目标机的威胁等级(NOPA:无威胁;PA:接近威胁;TA:交通告警;RA:决断告警),并将目标信息以图形的方式显示。当目标机的威胁等级为TA时,系统显示目标机信息的同时伴有语音告警。如果目标机的威胁等级为RA时,系统显示目标机信息的同时伴有语音提示。在产生RA的过程中,如果目标机也装有ACASII设备,两架飞机就会利用S模式数据链,进行决断意图的沟通,实现飞机间的协调避让;否则,机载防撞系统将输出决断告警建议,由飞行员操纵飞机完成避让。该系统的主要工作原理如图1所示。
3 TCAS系统功能介绍
TCAS系统的主要功能,一是空中交通管制应答,二是交通告警和防撞。
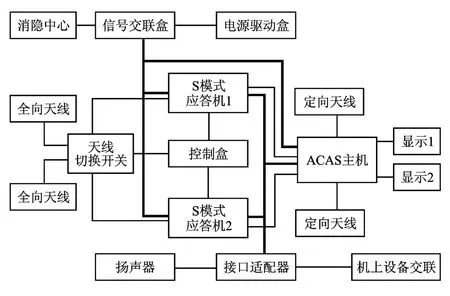
图1 TCAS系统原理方框图
3.1 空管应答
防撞系统的S模式应答机与地面空管二次雷达配合,向ATCRBS的地面雷达站提供飞机编码和飞行高度,在雷达站要求的情况下,提供单机识别信息,以利于地面空管人员进行空中交通管理。
3.2 防撞
防撞系统探测其监视范围内出现的装有S模式或A/C模式应答机的飞机,对接近飞机进行跟踪,对出现碰撞危险的接近飞机,确定出本机合适的垂直机动飞行建议,并通过声音和图像通知驾驶员,以便及时采取措施,避免碰撞。防撞系统的主要功能包括:
(1)监视功能。探测在系统监视范围内出现的装有S模式或A/C模式应答机的飞机,建立航迹,比较并更新现存航迹。
(2)跟踪功能。对接近飞机进行跟踪,获得包括距离范围、相对方位和相对高度等信息,并计算接近飞机的相对位置、接近范围和高度变化率。
(3)潜在威胁评估功能。利用跟踪数据,通过冲突探测和解决处理逻辑,与告警参数进行比较,确定接近飞机的潜在威胁,当出现碰撞危险时,根据危险的程度发出交通告警和决断告警。
(4)交通告警(TA)显示功能。通过显示器目标符号的显示画面位置、形状、颜色和数据标牌,提供周围空域出现的接近飞机的交通态势和交通告警。
(5)防撞计算和决断计算告警(RA)显示功能。对出现碰撞危险的接近飞机,确定出本机合适的垂直机动飞行建议,通过显示器目标符号的显示画面位置、形状、颜色和数据标牌,以及组合的VSI垂直速度/高度指示仪表画面,给出决断告警显示,以便本机与接近飞机间达到或保持安全间隔距离。
(6)音响告警功能。通过模拟语音输出给座舱音频系统提供交通告警、决断告警的音响信号告警。
(7)空对空协调功能。对接近的存在碰撞危险并装有ACASII系统的飞机,本机将会与接近飞机建立一个机动协调数据联系,确保两机间的决断告警是协调和兼容的。
4 一例空中故障的分析与排除
4.1 故障现象
在进行飞机试飞的过程中,飞行员反应TCAS防撞系统在空中工作不稳定,当飞机飞行高度达到6000m左右高度时,在防撞系统显示器上间断性出现“TCAS OFF”字符,显示器上的目标也随之消失。此时飞行员观察不到飞机周围的目标,如果在与其他飞机相遇时,没有目标显示,也没有告警提示,将会造成飞行员无法了解飞机周围空域的飞行情况,可能会导致飞行员对飞机的飞行操作做出错误的判断。
4.2 故障分析和排除
TCAS防撞系统与大气数据计算机和无线电高度表交联,当飞机在空中飞行时,通过获取无线电高度来控制防撞系统的防撞功能开关和工作模式的转换。在飞机无线电高度低于60ft左右时,防撞系统ACASII主机不工作,即显示器上显示“TCAS OFF”字符;当无线电高度到达60ft左右时,防撞系统ACASII主机转入正常工作状态,即显示器上的“TCAS OFF”字符变换为“TCAS STBY”字符,随后消失;当飞机无线电高度在1,200ft以下时,防撞系统ACASII主机处于“TA”交通告警模式,即显示器上显示“TA ONLY”字符;当飞机无线电高度在1200ft以上时,防撞系统ACASII主机处于“RA”决断告警模式,即显示器上的“TA ONLY”字符消失。分析后认为TCAS防撞系统的ACASII主机工作模式是受无线电高度表收发机输出的高度信号控制,飞行员反映飞机飞行高度达到6000m左右高度时,在显示器上间断性出现“TCAS OFF”字符,很有可能是由于无线电高度表间断性给了ACASII主机一个60ft以下的信号,从而引起防撞系统ACASII主机间断性停止工作。
通过进一步的分析,发现与防撞系统交联的无线电高度表信号是由接口适配器进行转换处理的,而在转换前的无线电高度信号是模拟信号,转换后的高度信号是数字信号。在查阅该型号的无线电高度表的相关成品资料后发现,其指示高度最大为750m范围以内,当飞机高度高于高度表的测量范围飞行时,高度表指示器的刻度盘上出现红色的故障信号牌,指示器的指针在高高度一侧的暗区内,以示此时无线电高度指示不准确,而当飞机飞行高度越来越高时,回波信号不正常(变弱)或“测量间隔”脉冲丢失时,高度表由跟踪状态转换为搜索状态,当存在的偏差信号过大时,高度表内部参量状态分析器也会有负极性的电压信号输出,此时高度表是不稳定的,也是不可信的。因此初步怀疑是不是这里出现了问题,当适配器将接收到的高度信号进行转换后传输给ACASII主机时,由于高度信号不稳定造成主机判定工作状态不准确,而输出显示不正常的。所以,工程人员进行了空中飞行状态模拟试验,使TCAS防撞系统工作在正常状态下,将气压高度调定到6000m高度,并将无线电高度表用模拟器调定到闭塞状态,此时,在长时间工作状态下观察TCAS防撞系统显示器,发现显示器上的目标瞬间消失,并显示“TCAS OFF”字符这一现象,故障复现。
随后,工程人员在实验室进行了进一步的验证,发现当给定高度超过无线电高度表测量范围时,适配器采样的模拟信号会出现不稳定毛刺,此时显示器就会显示“TCAS OFF”。最后,成品厂通过更改TCAS防撞系统内部软件,对采样的模拟信号出现毛刺时进行平滑处理,使这一故障得以消除。
5 结语
通过以上对TCAS防撞系统故障的分析和排除,对防撞系统工作原理有了更深的认识和理解。在改装试验及试飞检查中,经过多方努力和改进完善,试验后,此系统在飞机上的工作已较为稳定可靠。由此可总结出,在排除过程中应该认真地分析故障原因,并对故障进行分类,然后进行迅速有效的故障排除,确保飞行安全以及飞行任务的顺利完成。
[1]陈莹.TCAS系统的相关研究与设计[D].成都:电子科技大学,2008.
[2]沈佳峰.民机TCAS机动策略与仿真研究[D].上海:上海交通大学,2011.
[3]周其焕.交通警戒和避撞系统的技术特点和发展现状[J].航空电子技术,1999(1):78-81.
[4]何晓薇.空中交通警戒与防撞系统的主要技术特点[J].中国民航飞行学院学报,2001(3):11-14.
