同期捕捉算法的改进及实现
2013-10-24韩晋,黄健
韩 晋,黄 健
(江苏金智科技股份有限公司,江苏 南京 211100)
0 引言
同期并列的理想条件是并列断路器两侧电源电压的3个状态量全部相等,即:待并侧频率与系统侧频率相等;待并侧电压与系统侧电压幅值相等;相角差为零。压差和频差的存在将导致并网瞬间,并列点两侧出现一定的无功功率和有功功率的交换。电网和发电设备一般都具有承受一定功率交换的能力。相对而言,相角差的存在会给断路器两侧带来更多的伤害,严重时会诱发次同步谐振。在实际并列操作中,只要并列合闸时冲击电流较小,不危及电气设备,压差和频差允许有一定的偏差,相角差要尽可能接近零。因此,应确保同期捕捉算法在相角差为零时完成并网。
机组同期在压差和频差不满足要求时,要对电压、频率进行调节,一般采用PID调节算法或模糊控制算法。一旦压差和频差条件满足,就要采用同期捕捉算法预测最佳合闸时机。本文主要研究同期捕捉算法,及对算法有直接影响的相角差的量测系统。
1 常用算法
并列点两侧的电压矢量差Ud=Ug-Us的波形如图1所示,其为周期的脉冲电压,点B是相角差为0(即Ud为0)的时刻。考虑到合闸回路动作有一定延时,为了能在点B合闸,要提前发出合闸命令,如在点A发出合闸命令(tDC为合闸回路动作时间)。同期捕捉算法的任务是选择点A。Ud的每个周期有且只有1个最佳的合闸点,实际运行中要求能够捕捉到第1次出现的最佳合闸点,以实现准确快速的并网。
常用的同期捕捉算法有2种,算法1是利用相角差与滑差及滑差加速度的关系的预测方法,算法2是基于相角差序列{δi}、运用现代预测理论的预测方法。

图1 滑差波形示意图Fig.1 Waveform of slip frequency
1.1 算法1
考虑相角差可能存在加速度的情况,相角差随滑差及滑差加速度变化的模型为:

其中,δ为相角差,ω为滑差角频率,t为时间。
软件根据合闸回路动作时间tDC及式(1)不断计算导前角 δYJ,并检测实时相角差 δ,捕捉到 δ-δYJ< ε时,发出合闸信号。只有在ω及Δω/Δt始终保持为常数的前提下,才能保证该模型的预测精度。
1.2 算法2
从相角差量测系统获得的相角差序列{δi}(i为时间递增方向)虽然是一维序列,但其中包含了{δi}变化的各次函数的信息,如滑差 ωs、滑差加速度 ω˙s、加速度变化率¨s等,以及可能出现的量测噪声。算法2应用现代预测理论对上述信息进行挖掘来预测合闸点,本文主要介绍2种预测算法:一种是对该序列采用预测的最简模型来预测同期点,同时对采样数据进行残差递推的分段辨识以提高预测精度;另一种是对序列采用多元线性回归,进行残差分析,对预测值进行修正。2种预测算法都是根据已有的相角差序列不断预测tDC之后的相角差,捕捉到<ε时,发出合闸信号。
算法1、2都是运行于离散的数字采样系统中,为了避免丢失合闸时机,ε不能过小,然而也不能过大,否则会降低同期质量。算法2与算法1相比能避免受到太多量测噪声和系统波动的影响,早期的微机准同期装置因微机水平比较落后,采样误差比较大,多采用此模型。随着目前微机技术水平的提高,采样精度已不再是问题。这2种算法的应用都很成熟。
笔者所开发的同期装置采用了双CPU的结构,分别运行以上2种算法。2个CPU的判读结果构成表决系统,只有在2种算法同时判断为可以合闸时,才能发出合闸命令。
2 问题的提出
由于相角差的变化是连续的,而CPU对相角差的测量和计算、算法的计算都是离散的。因此,理论上无法每次都能捕捉到相角差绝对为零的时刻。在系统频率为工频的情况下,合闸时刻的最大理论误差为±10 ms,该误差随系统频率的不同而不同。对于高速断路器而言,精度偏低。为了获得更好的同期时刻,应插入一个更短的时间间隔,判别在本次发出合闸脉冲是否比下一次合适。
以下举例分析离散间隔对合闸精度的影响。根据相角差与频差的近似关系:δ=ωst=2πΔf t(ωs为两侧滑差;Δf为两侧频率差),以Δf=0.25 Hz为例进行计算。

由计算结果可知,以10 ms为间隔,算法本身给同期效果带来的误差范围为[-0.9°,+0.9°],而以1 ms为间隔,算法本身给同期效果带来的误差范围将减小到[-0.09°,+0.09°],接近于 0。
由以上分析可知:在相同的条件下,减小数据离散度可显著提高合闸精度。而只有进一步提高原始数据密度,并对算法进行相应的改进,才能减小合闸离散度。以上分析是在测量无误差、未计及滑差加速度、导前时间设置无误差的前提下进行的,以下将针对此问题讨论同期捕捉算法的改进和实现。
3 算法改进
合闸时刻是以相角差序列、滑差序列和导前时间为基础通过算法预测的;同期捕捉算法只有在数据更新后计算才有意义;而相角差量测序列{δi}的更新是以10 ms为周期的。2种算法都存在相角差时间离散过大而引起误差过大的问题。为了将合闸动作时间的误差减小至±1 ms,必须每隔1 ms执行一次捕捉算法,并且相角差要在1 ms内得到更新。
3.1 算法1的改进及实现
算法1的执行分为根据模型求解导前角和根据相角差的实测值与导前角比较判断合闸时机两部分。
在已知合闸回路动作时间的前提下,根据式(1)不断计算合闸导前角δYJ(即在此时电压条件下,为使断路器在相角差接近零时并网而提前的相角差角度)。式(1)所需滑差及滑差的加速度计算如下:
式(2)和式(3)所需要数据从序列{δi}中取得。
由于{δi}是10 ms更新一次,原有算法在相角差更新时,计算一次导前角,并判断一次合闸条件。本文采用插值原理对较短时间内的相角差进行估计,即随后的10 ms内每隔1 ms进行一次估计,估计值为每 1 ms更新一次,因此可每隔 1 ms判断是否满足若条件满足,则发合闸命令,否则继续执行算法。一旦有新的相角差产生,即序列{δi}更新后,将采用新的数据计算和 δYJ。
3.2 算法2的改进
所有的预测算法都是以序列{δi}为基础进行预测的。预测算法有很多种,以下介绍2种:预测算法1[7]对序列进行线性拟合;本文提出了预测算法2,对数据进行抛物线拟合。2种算法都挖掘了预测算式中的有用信息,对可能出现的误差进行了修正。
3.2.1 预测算法 1[7]
对于相角差序列{δi}(i为时间递增方向),其一步预测模式为:

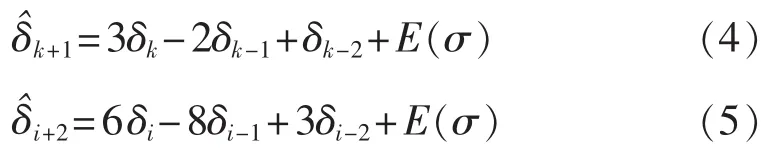
实际中采用预测的最简模型,根据递推残差辨识预测原理,对预测值与实际值 δi的插值再进行递推高阶参数,直至
3.2.2 预测算法2
对相角差序列进行抛物线拟合,拟合基函数y=at2+bt+c,假设 t=0 时,y=δi-2;t=T 时,y=δi-1;t=2T时,y=δi;对 t=3T 时的时的分别进行一步预测和二步预测。通过求解方程组
加入残差修正后的一步预测模型和二步预测模型分别为:
以上2种预测算法对原始序列要求量小,运算简单。实际滑差的变化为非线性的,因此预测算法2比预测算法1更能真实反映实际情况,预测精度更高。
假设在匀速滑差的情况下,δk为实际值,为估计值,εk为该点的估计误差,εk的方差为σ2。第n步预测为:

不难求出其预测方差为2n2σ2,可见预测方差是随预测步数的平方增加的。
因此,当tDC一定时,算法的精度就取决于步长,步长越短,步数就越多,预测的准确度就急剧下降。例如tDC为100 ms时,对其进行100次步长为1 ms的预测,其误差远大于对其进行一次步长为100 ms的预测。为了提高预测的准确度,采用加大预测步长的方法来减少预测步数所造成的误差。因此本文所提出的预测算法都是针对固定间隔是tDC的序列。
4 改进算法的实现
以下所讨论的相角差的量测系统适用于算法1和算法2。算法1的实现比较简单,不再赘述,以下主要讨论算法2的实现。
4.1 相角差的获取
同期捕捉算法中最主要的参量就是相角差。相角差量测可以通过测量电压瞬时值再进行数学处理而获得,也可以通过2个同相电压的正向过零点的时差来计算相角差而获得。
第1种方法采用富士算法计算两侧电压的瞬时相量而获得相角差。由于并列双方频率不相等,难以同时对其进行整周期采样,计算结果难免会存在不同步误差。为获取准确的合成相量,必须对采样数据进行同步化处理。文献[5]提出利用双线性插值平均法对采样数据进行同步化,然而这只适用于频差较小的情况,对于频差较大的情况,难以确定2路采样数据的时间对应关系。因此该方法不具有可行性。
第2种方法将正弦波转变为方波,根据方波的过零比较计算来获得两侧的频率和相角差。该方法可获得充足和高质量的原始数据,但数据离散度较大。由于发电机和系统的惯性时间常数很大,可认为在几十毫秒内发电机和系统的频率不变,即在此段时间内同期点两侧频差是匀速运动。因此本文提出采用线性插值和线性外推值的方法来增加数据的密度。
线性插值原理见图2,只用于为算法2生成序列{δ′j}。线性外推的原理见图 3,在 2种算法中都有应用,用于1 ms中断中更新相角差。
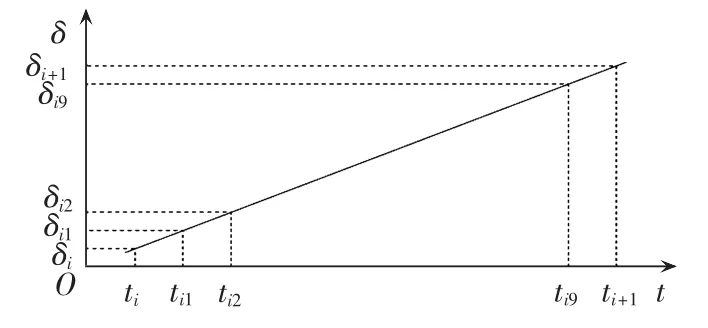
图2 线性插值原理图Fig.2 Schematic diagram of linear interpolation
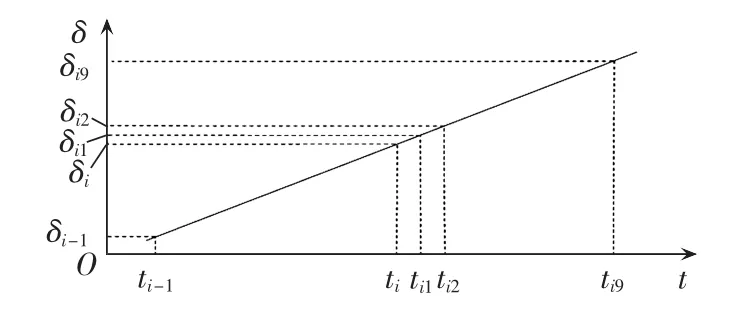
图3 线性外推原理图Fig.3 Schematic diagram of linear extrapolation
算法 2 需要{δi}、{δ′j}、{δ″k}3 个序列。固定间隔为10 ms的采样序列{δi}由采样计算获得,经过插值计算后转变为固定间隔为 1 ms 的序列{δ′j},从中提取固定间隔为 tDC的序列{δ″k},{δ″k}即为算法所需序列。在1 ms中断中,{δi}不会更新,序列{δ′j}和{δ″k}将会更新。算法根据序列{δ″k}不断预测 δ″k+1或 δ″k+2。
序列{δi}的时间间隔随频率的不同而不同,实际运行中电压频率可能不是50 Hz,该序列间隔将不是10 ms,因此要根据实际的频率进行相应的转变,保证{δ″k}为固定间隔是tDC的序列,否则会带来预测误差。
本文提出的预测模型要求被测序列为递增序列,而在一个周期内相角差变化先递增后递减,因此要做适当处理,将相角差序列转变为单调递增序列。
4.2 算法实现的若干问题
算法2的实现主要包括相角差序列的获取、预测队列的创建、算法的计算、残差分析等。以下主要讨论判别预测点的单调性和针对tDC过大而需要进行二步预测的问题。
算法2的实现采用两段预测的方式。第1段是对tDC-1 ms之后的相角差进行预测,产生预测值1;第2段是对tDC之后的相角差进行预测,产生预测值2。因此需要 2 个不同时间间隔的预测序列{δ″k},这2个序列均由序列{δ′j}转变而来。2段预测所得的2个结果用来判断tDC之后的相角差的单调性,以确保不会逆功率合闸。只有2段预测值都递增,且小于一定值,才认为合闸条件满足。其条件表达式如下:

其中,ε1和ε2为允许误差。如图4所示,仅满足条件式(6)将在区域A内合闸,条件式(7)是为避免在区域B内合闸,只有2个条件都满足才能在区域C合闸。
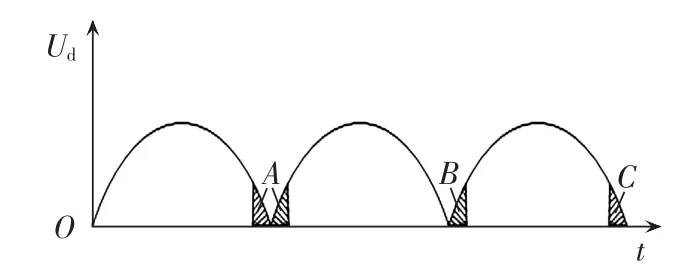
图4 合闸区域示意图Fig.4 Schematic diagram of closing area
大多数情况下,一个周期内的数据是足够使用的,这与合闸回路的动作时间与两侧频差有关。目前广泛使用的SF6断路器和真空断路器的动作时间一般不超过100 ms,加上中间继电器的动作时间等,一般不会超过200 ms。即使以最短的周期,允许频差0.5 Hz为例,一个周期将是2 s,也有足够的数据支持算法预测同期点。因此针对合闸回路动作时间不太大的情况,取预测步长为tDC,根据式(4)进行一步预测。考虑到极个别的对于合闸回路动作时间比较大的情况,为了能在一个周期内得到足够多的数据,取预测步长为tDC/2,根据式(5)进行二步预测。
4.3 算法的实验验证
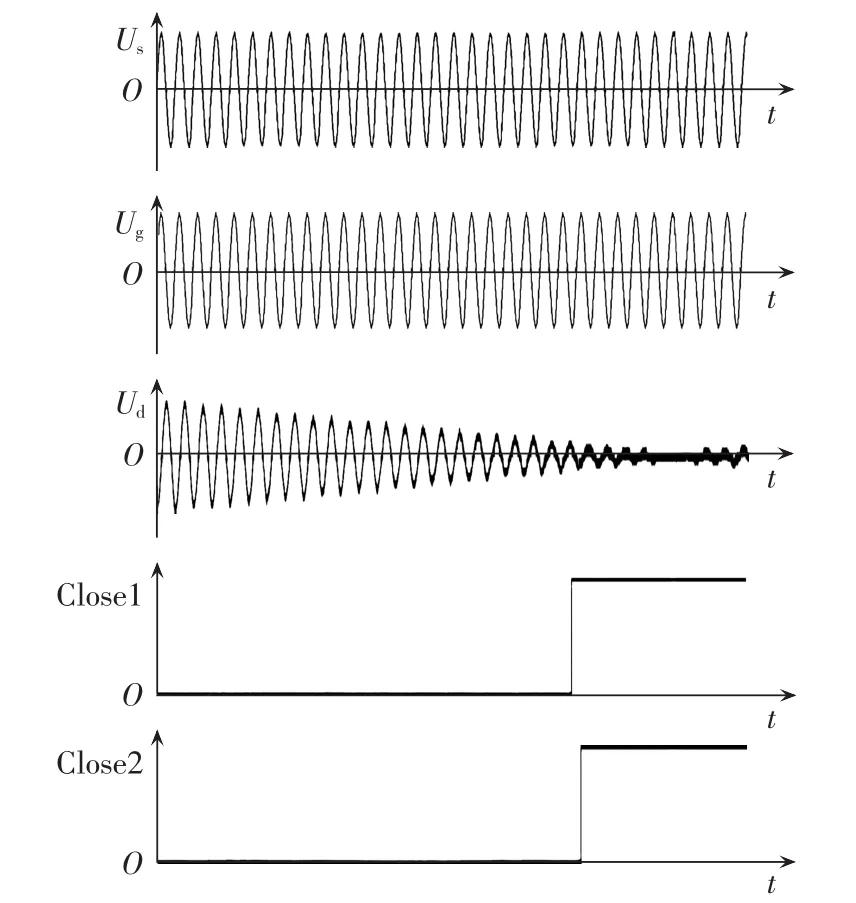
图5 同期合闸录波图Fig.5 Recorded wave of synchronous closing
实验证明减小数据离散度后的算法也能明显改善合闸质量,鉴于之前的分析,不再给出录波波形。
实验证明改进的算法确实提高了合闸的精度。改进后的算法计算量有所增加,然而现在CPU处理能力强大,计算量已不再是问题。
5 结语
同期捕捉算法有2种类型:一种是对相角差随滑差变化规律的模型的求解;一种是对相角差序列进行分析,对合闸点进行预测。预测算法有多种,本文介绍了分段递推残差和基于残差分析的多元线性回归的预测方法。针对2类算法中同时存在离散度过大而造成的误差,本文对算法进行了改进,并对对算法有直接影响的相角差量测系统进行了处理,即通过方波过零比较获取最原始的数据,通过插值计算估计值来增加数据密度。实验证明改进后的算法使同期合闸质量有了明显提高。所介绍的算法不仅适用于发电机同期和线路同期,也适用于对重合闸等情况。
