一种基于超声传感器的三维坐标测量方法
2013-10-22单良,孔明,侯蕊,赵军
单 良,孔 明,侯 蕊,赵 军
(1.中国计量学院信息工程学院,浙江杭州 310018;2.中国计量学院计量测试工程学院,浙江 杭州 310018)
0 引言
三维坐标检测是现代生产、生活必不可少的检测技术[1],其测量范围涵盖广,既包含地球、城市等大尺度物体的三维测量[2,3],也包含飞机、船舶、建筑、汽车等中等尺度物体的三维检测[4,5],同时,随着纳米工业的兴起,三维坐标测量也已经进入纳米尺寸时代[6]。根据测量对象的不同,其测量方法也各不相同,目前中等尺度检测方法主要有三维坐标测量机[4,5]、激光跟踪仪[7]、机器视觉坐标测量机[8]等,这些测量设备,成本高,不利于其大范围的推广使用。
本文在已有三维坐标检测方法基础上,提出一种采用超声波测距的低成本三维测量方法,该方法采用超声波发射端作为三维定位点,测量发射端到各接收端的距离,并利用最小二乘法三维坐标反演模型获得发射端在测量空间的位置,该方法可以根据测量范围配置不同数量的超声波接收端,具有良好的扩展性,可以应用于仓储定位、机器人导航定位、虚拟现实、模拟实战游戏、无线传感网络定位等方面。
1 超声波三维测量原理
最小的超声波三维测量系统由1个超声波发射端和3个超声波接收端组成,检测时,超声波发射端发射超声信号并进行计时,由超声波接收端接收超声信号并停止计时,根据超声测距原理[9,10],通过计时器的时间计算获得超声波发射端到超声波接收端的距离,当获得发射端到3个以上接收端之间的距离时,就可以计算出发射端的空间位置。本文设计的实验系统测量原理见图1所示,由1个超声波发射端点(X)和4个超声波接收端点(A,B,C,D)组成。
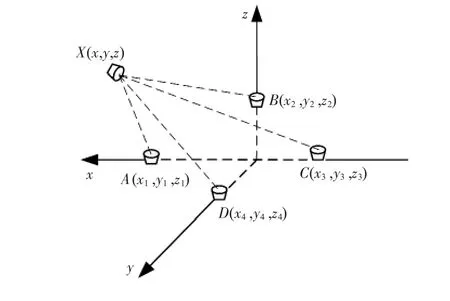
图1 三维坐标测量示意图Fig 1 Diagram of three-dimensional coordinate measurement
超声波接收端点A,B,C,D的空间坐标为已知值(xi,yi,zi),超声波发射端空间坐标是被测量(x,y,z),则超声波发射端到4个接收端点的距离可表示为

式中li(i=1,2,3,…,n)为超声波发射端到第i个超声波接收端之间的距离。为求解式中的3个未知数,必须建立3个以上方程,当方程数超过3个时,求其最优解。
2 基于最小二乘法的三维坐标估计模型
超声波三维坐标测量系统以FPGA作为核心处理单元,为了实现空间点位置的实时监控与测量,考虑FPGA中定位算法对逻辑单元的使用率和处理速度,本文在保证反演精度的情况下,提出采用基于最小二乘法的三维坐标反演模型,实现三维坐标计算。
为了便于反演算法的实现,对公式(1)两边进行平方,得距离方程的平方形式

为进行最小二乘估计,首先要将n个测量方程组线性化[7]。可采用相交圆弦线的方法进行线性化方程,将第2至n共n-1个测距方程分别减去第1个测距方程,可得到n-1个互不相关的线性方程

由最小二乘定义可知,最接近正确三维坐标的坐标值是在距离残差和(此处为距离平方的残差和)为最小的情况下得到的。对式(4)组成的方程组进行最小二乘估计,其正规方程可用矩阵形式表示为

其中
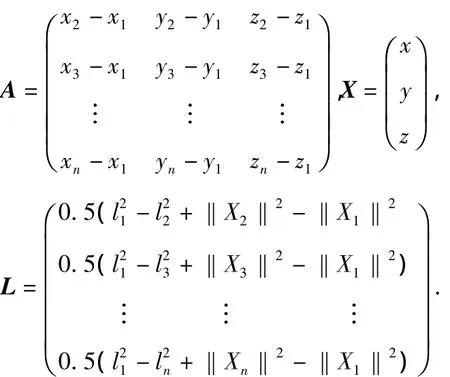
因此,可推导出坐标的估计值为

式(5)即为基于最小二乘法的三维坐标估计模型。
3 实验
实验装置原理图见图2所示,为了便于实验研究,采用2块标准的孔板作为超声波发射端和超声波接收端,2块孔板上各打5×5个通孔,每个通孔间距100 mm,超声波发射端和超声波接收端能正好固定于通孔中,2块孔板中接收端的孔板固定,而发射端的孔板安装在导轨上,可前后调节。以接收孔板中第3排第一个孔孔心作为坐标原点,孔板第3排孔心的连线为x坐标轴,孔板的垂线为y坐标轴,第1列孔心的连线为z坐标轴。
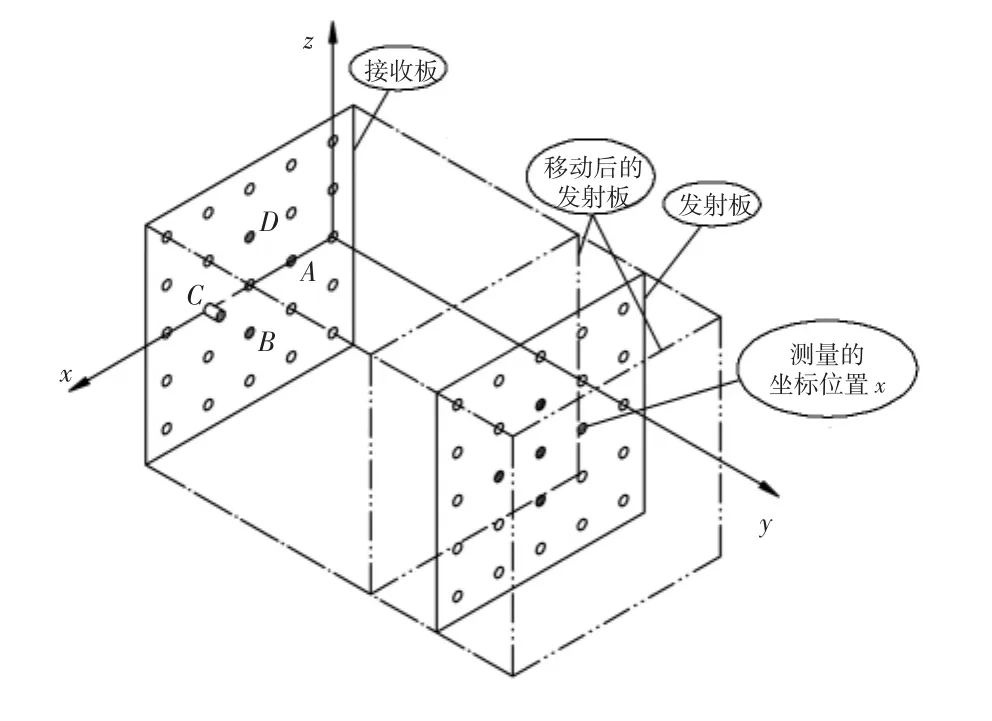
图2 测量装置简图Fig 2 Diagram of measuring device
把4个超声波接收端安装在A,B,C,D4个点,4个点的坐标为
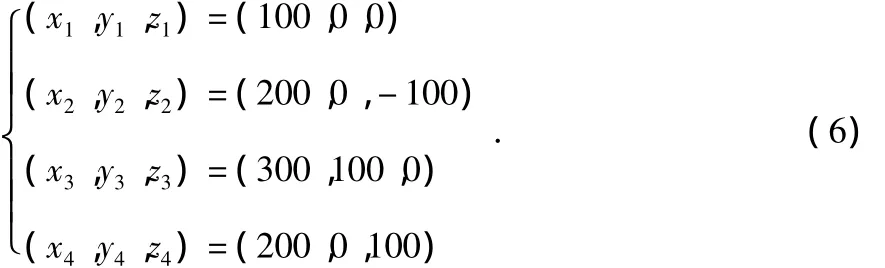
在不同y坐标的各5个位置安装超声波发射端,每个位置进行20次测量,以20次测量的平均值作为测量结果,见表1所示。

表1 三维坐标测量值与误差分析Tab 1 Measurement values and error analysis of three-dimensional coordinate
由表1可知采用最小二乘三维反演算法对超声波三维测量系统进行位置计算,计算结果x,y,z三轴的绝对误差均小于20mm,对每个位置的20次重复测量进行分析,每个坐标上最大值和最小值之差不超过5 mm,因此,虽然绝对误差较大,但是测量的重复性较好,可以通过误差补偿等方法实现更高精度的检测。分析测量数据发现坐标测量定位误差主要来源于收发机之间的角度引起的测距误差,由于超声波的衰减和传播时间受距离和相对角度的影响,在三维坐标检测中,必须要考虑角度误差的补偿,以实现更高精度的测量。
4 结论
本文提出了一种基于超声传感器的低成本三维坐标测量方法,该方法采用超声波传感器做为三维探测传感器,根据一个发射端到多个接收端之间的距离实现空间三维坐标的反演,系统定位误差小于20 mm,其主要误差来源于收发机之间的角度引起的测距误差,但重复性较好,系统精度有进一步提升的空间。同时系统具有成本低、可扩展性强等特点,具有广泛的应用前景。
[1] 李广云.工业测量系统最近进展及应用[J].测绘工程,2001,10(2):36-40.
[2] 王 刚,杨 强,李 强.GPS在三峡库区开县大榜8社滑坡监测中的应用[J].山西建筑,2011,37(2):197 -198.
[3] 姜雁飞,胡荣明,杨联安.陀螺经纬仪在地理空间定向中的应用研究[J].西北大学学报,2011,41(1):145 -149.
[4] 周万勇,邹 方,薛贵军,等.飞机翼面类部件柔性装配五坐标自动制孔设备的研制[J].航空专用设备,2010(2):44-46.
[5] 王 昊.三坐标测量技术在汽车制造业中的应用[J].仪器仪表与检测,2005(7):76-78.
[6] 王伟丽,范光照,程 方.新型纳米级二维工作台的参数测试[J].机械制造,2006,44(2):64 -67.
[7] 王金栋,郭俊杰,费致根.基于激光跟踪仪的数控机床几何误差辨识方法[J].机械工程学报,2011,47(14):13 -19.
[8] 张雪飞,彭 凯,刘书桂.点阵式测头成像视觉三坐标测量系统建模[J].工艺与监测,2007(3):103-105.
[9] Nakamura Shigeki,Sato Tomohiko,Sugimoto Masanori,et al.An accurate technique for simultaneous measurement of 3D position and velocity of a moving object using a single ultrasonic receiver unit[C]∥2010 International Conference on Indoor Position and Indoor Navigation(IPIN),2010:1 -7.
[10] Francesc Fiorenzo,Maisano Domenico.Ultrasound transducers for large-scale metrology:A performance analysis for their use by the MScMS[J].IEEE Transactions on Instrumentation and Measurement,2010,59(1):110 - 121.
