基于CAN总线ECU诊断功能的一致性测试设计*
2013-10-22程安宇
程安宇,赵 恬,申 帅
(重庆邮电大学自动化学院,重庆 400065)
0 引言
随着汽车电子技术的发展,越来越多的汽车电子控制单元(electronic control unit,ECU)被应用于汽车控制。传统的诊断方法在诊断的准确性、使用方便性等方面都难以适应现代汽车技术的发展[1],为解决这一问题,汽车厂商在车辆ECU软件系统中增设诊断协议部分。诊断功能的实现是ECU开发过程中的重要部分[2]。
CAN总线是目前汽车ECU实现通信的主要网络。因此,基于CAN总线的ECU诊断功能的实现已成为诊断技术的必然趋势。一致性测试是诊断协议测试的一个重要方面,是协议开发人员首要关心的问题,它测试诊断协议的实现是否符合协议规范。文献[2]和文献[3]在诊断协议的一致性测试方面测试用例较少,测试不全面,不能验证诊断功能是否符合协议。
本文根据某汽车厂商ECU的诊断需求规范,基于CAN总线诊断协议ISO 15765,设计了测试方案和测试用例,测试用例涵盖需求规范中的所有诊断数据,并通过CANoe总线分析软件中CAPL编程模块完成。
1 CAN总线的诊断系统分析
CAN总线诊断系统如图1所示,客户端向服务器ECU发送某服务的请求报文,服务器收到请求报文,对请求报文的格式和内容进行判断后,发送响应(肯定或否定响应)报文或没有响应。诊断系统通过这种方式完成通信和数据的交换。
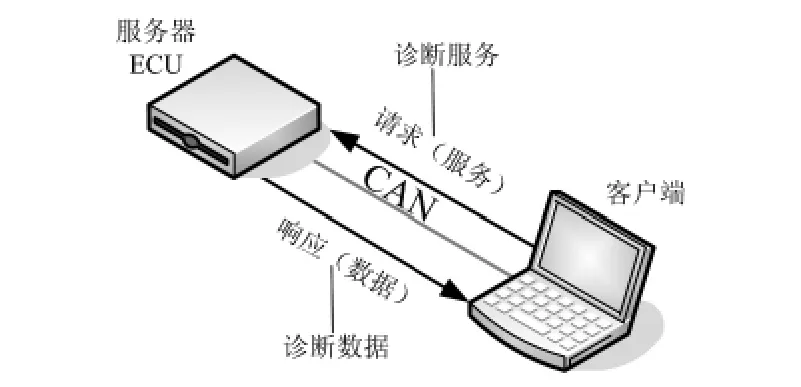
图1 CAN总线诊断系统组成Fig 1 Composition of CAN bus diagnostic system
根据开放系统互连(open system interconnection,OSI)七层参考模型,CAN总线诊断通信系统分为4层,如图2所示。应用层遵循 ISO 14229—1UDS(unified diagnostic services)或ISO 15765—3中诊断服务的定义。网络层遵循ISO 15765—2实现数据的传输等。数据链路层和物理层遵循ISO 11898—1[4]。

图2 OSI模型中UDS在CAN总线的实现Fig 2 Implementation of UDS on CAN bus in OSI model
CAN总线诊断协议ISO 15765中,网络层为应用层提供服务接口,应用层通过访问这些服务接口实现与网络层的信息交互[5]。
2 测试方案设计
在诊断系统的开发过程中,诊断协议栈软件完成了诊断协议的一致性测试后,才能将具有诊断功能的ECU应用于整车上。诊断协议栈的测试流程如图3所示,首先,分析协议得到测试数据;然后,将此数据用于被测的诊断协议栈软件,得到测试输出;最后,将测试输出与分析协议得到的预期结果相比较,分析测试结果的正确与否。如果结果正确,则测试通过;如果结果错误,则修改被测软件存在的问题,再次测试。
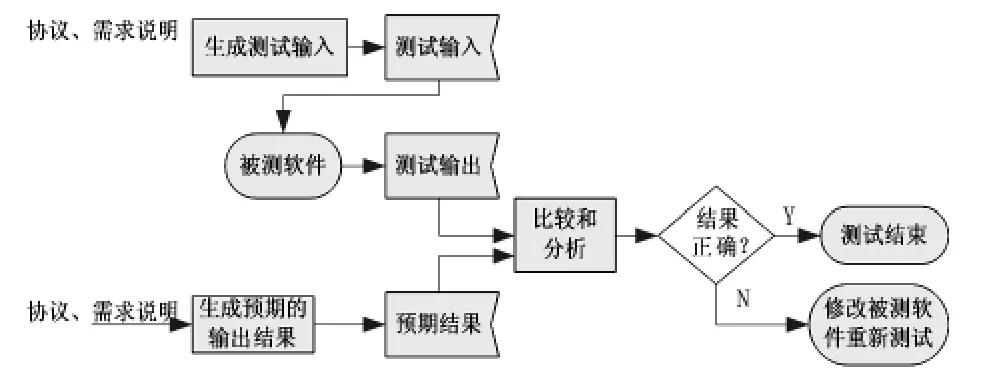
图3 测试流程Fig 3 Flow chart of test process
2.1 诊断结构设计
诊断结构有3种形式:1)客户端和服务器在同一网络中直接连接;2)客户端通过网关和服务器连接;3)客户端和服务器在2个网络中,客户端与主网络连接,主网络通过网关与子网络连接。
本文的诊断结构采用第一种形式,客户端和服务器ECU在同一网络。如图4所示,服务器ECU为核心芯片为STM8的车身控制模块(body control module,BCM),此外还在其上运行诊断协议栈,其中包括:应用层、网络层和底层软件。客户端为PC机,在其上运行德国Vector公司的CANoe软件,通过CAPL编程实现测试用例来发送诊断服务请求,测试用例分为网络层测试和应用层测试。
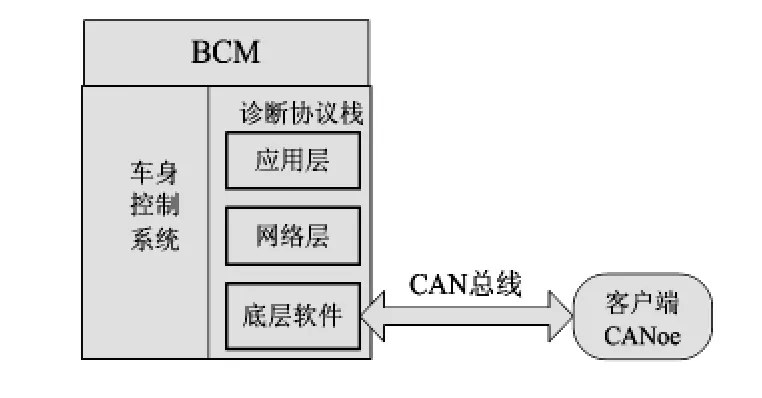
图4 诊断系统结构Fig 4 Structure of diagnostic system
CAN总线上的数据在Trace窗口显示,以便分析诊断系统通信是否成功和ECU的诊断协议栈软件是否符合协议规定。
2.2 测试用例设计
从软件测试用例设计方法的角度,分为白盒测试和黑盒测试[6]。本文采用黑盒测试,针对软件的功能需求与实现进行测试。不需考虑程序编码结构,测试者只需了解程序输入和输出间的关系,或是程序的功能。本文依靠程序功能的需求规范和诊断协议确定测试数据,判定测试结果的正确性。
测试用例设计时,需要分析需求规范,然后确定系统正常的输入输出,以验证系统的功能是否正常。由于篇幅限制,这里只列出几项诊断数据,如表1所示,ECU诊断数据的定义,支持的SID(service identifier)、各SID对应的子功能、如表2所示支持的DID(data identifier)、如表3所示网络层时间参数值等内容。
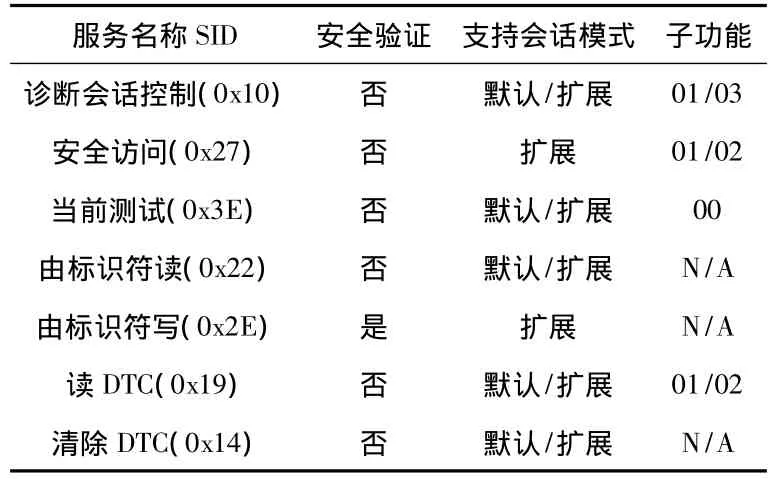
表1 ECU支持的SID定义Tab 1 Definition of SID supported by ECU
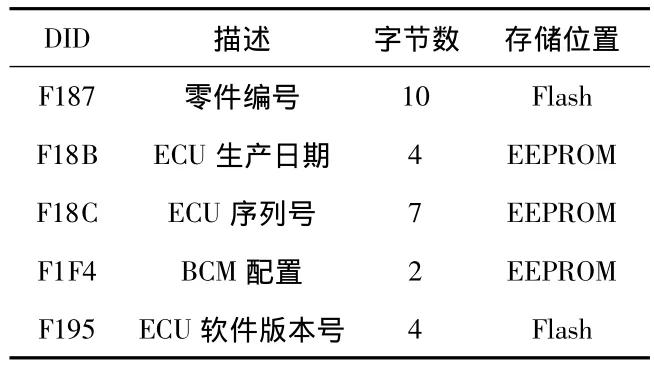
表2 ECU支持的DID定义Tab 2 Definition of DID supported by ECU
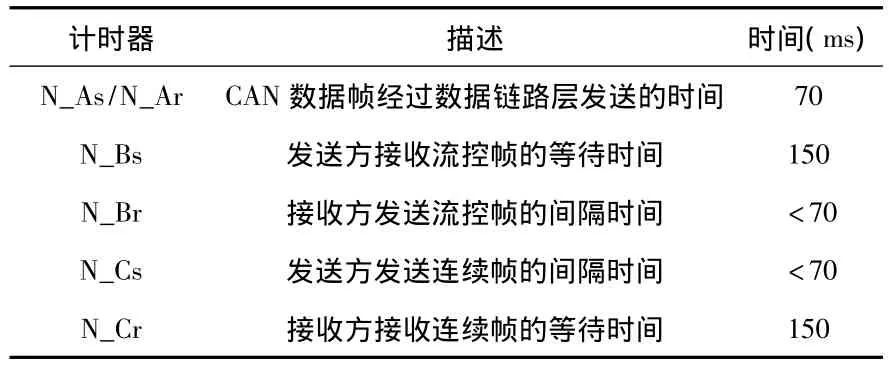
表3 网络层计时器描述Tab 3 Timer description of network layer
测试用例中不仅有正确的输入,还应有错误的输入,来验证系统对错误情况的处理能力。因此,设计的测试用例分为正常用例和异常用例。本文测试用例的设计根据诊断协议ISO 15765和汽车厂商规定的诊断数据。
1)正常用例
正常用例,即客户端按照正确的报文格式和预定的步骤发送请求报文,以验证网络层和应用层是否符合协议和需求规范。测试要求如下:
a.正常通信下,测试网络层的数据打包,解包和流控制机制,如(客户端)发送单帧、(服务器)响应单帧、发送多帧、响应多帧[7];
b.测试网络层是否能正确识别数据解包的错误情况;
c.测试应用层服务在合法请求下,响应报文格式是否正确,响应时间是否符合需求规定;
d.测试执行应用层服务合法的执行顺序的情况下,是否实现了其功能。
2)异常用例
异常用例,即客户端按照非法的服务执行顺序发送请求报文,或发送错误的报文格式的请求报文,以验证网络层和应用层是否符合协议规定。测试要求如下:
a.客户端发送错误的N—PDU,测试网络层对错误情况的处理能力;
b.客户端超时发送诊断请求报文,测试网络层对超时的处理情况;
c.客户端发送无效数据帧(除了定义的4种帧类型之外的)或在正常通信时发送其它报文帧打断正在进行的通信过程,测试网络层的处理能力;
d.测试应用层服务在非法请求报文下或非法的服务执行顺序时,能否做出正确的否定响应。
3 测试
3.1 测试项执行
根据分析需求规范的结果设计由DID写入数据执行的流程如图5所示,此流程涉及多个服务的执行,以及单帧、多帧数据的传输。以此为例说明设计测试项。
首先,ECU的会话模式只有进入非默认模式时,才能进行安全访问请求。安全访问请求服务成功执行后ECU解锁,如果ECU未成功解锁,则由否定报文判断失败的原因,修改请求报文后再次执行安全访问请求。ECU解锁成功后由DID读出ECU中存储的数据,然后执行由DID写入数据的服务。为了验证数据是否成功写入,将由相同的DID读出和写入的数据相比较,如果读出和写入的数据相同,证明写入成功;反之,则不成功。

图5 由DID写入数据服务执行的流程图Fig 5 Flow chart excuted by WriteData service
在此流程中,由于数据的读出、写入涉及了多帧传输,所以,在此过程中还应测试ECU的网络层计时器是否遵循需求规范,如表3所示。
测试执行分为网络层、应用层测试,结果如表4与表5所示。
ECU寻址方式为物理寻址,请求和响应ID分别为0x766,0x7A6。测试项为客户端发送的请求报文,预期结果为分析协议和需求规范后得到的ECU应做出的反应。
测试的请求和响应报文等有关信息在Trace窗口显示,以供测试者通过报文内容分析测试结果。
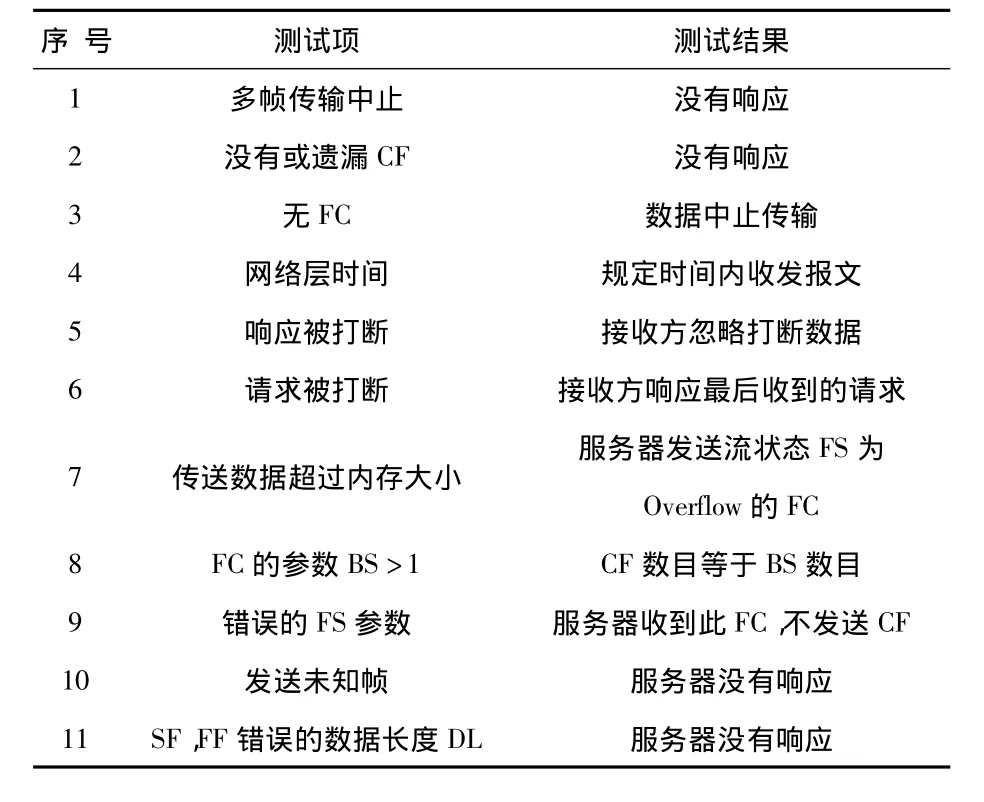
表4 网络层测试结果Tab 4 Test resurt of network layer

表5 应用层测试结果Tab 5 Test Test result of application layer
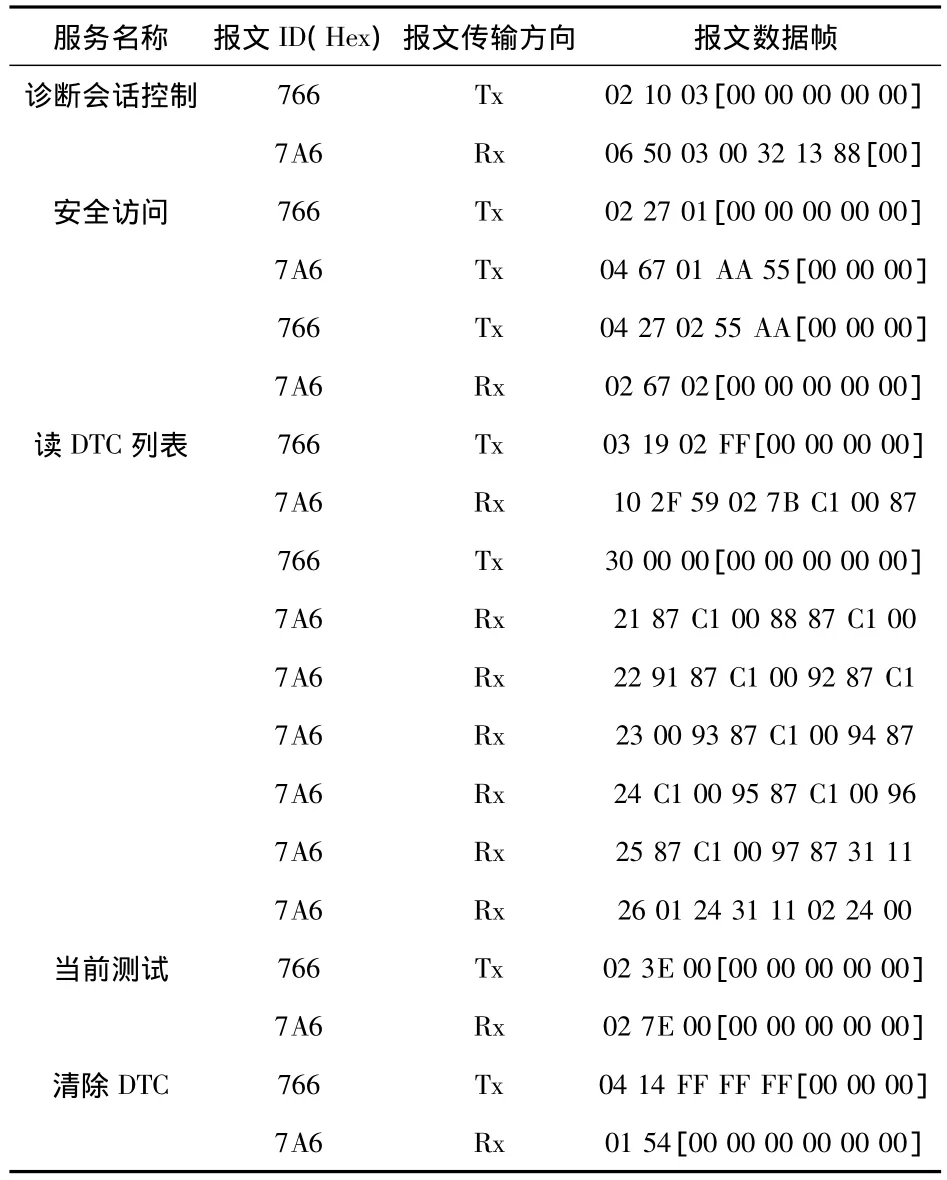
表6 BCM诊断功能测试结果Tab 6 Test results of BCM diagnostic function
3.2 测试结果分析
测试项执行后,通过分析Trace窗口的报文与预期结果相比较,发现测试结果符合预期结果。所测试诊断报文传输机制、诊断服务、执行流程和错误处理等内容符合诊断协议规定。部分测试结果如表6所示。
4 结束语
本文通过研究分析CAN总线诊断系统,针对一种BCM的诊断需求规范,依据CAN总线诊断协议ISO 15765设计了测试方案和用例,并通过CAPL编程执行测试用例。经过测试,此BCM诊断协议栈符合ISO 15765协议和需求规定,说明此测试方法能有效地测试诊断功能和诊断协议的一致性。
[1] 胡思德.汽车车载网络(VAN/CAN/LIN)技术详解[M].北京:机械工业出版社,2006.
[2] 韩 鑫.电容式混合动力汽车离线诊断系统的设计开发[D].镇江:江苏大学,2011.
[3] 李 锐,王晶莹,姚 燕,等.基于ISO 15765的车载CAN网络诊断设计[J].计算机工程,2012(4):35-36.
[4] ISO/DIS 15765—2:Road vehicles-diagnostics on controller area networks(CAN)[S].
[5] ISO/DIS 15765—3:Road vehicles-diagnostics on controller area networks(CAN)[S].
[6] 郑人杰.计算机软件测试技术[M].北京:清华大学出版社,1992.
[7] 常欣红,于金泳,刘志远.汽车故障诊断标准 ISO 15765的网络层分析与实现[J].汽车技术,2006(9):40-43.
[8] 程安宇,赵国庆,冯辉宗,等.基于CAN总线的电子控制单元功能测试方法[J].计算机应用,2012(1):139 -141.
