输入整形法在起重机中的应用
2013-10-20任会礼付玲李向国高常春梅志千孙雷
任会礼,付玲,李向国,高常春,梅志千,孙雷
(1.长沙中联重工科技发展股份有限公司,湖南长沙410013;2.河海大学机电工程学院,江苏常州213022)
0 引言
起重运输机械既是提升、搬运和输送物料及产品的机具,亦是提高劳动生产率和生产过程机械化不可缺少的大型机械设备。龙门起重机是指水平桥架设置在2条支腿上构成门架形状的一种桥架型起重机。这种起重机在地面轨道上运行,主要用在露天贮料场、船坞、电站、港口和铁路货站等地进行搬运和安装作业[1]。
起重机自诞生至今,起重机吊装过程中吊重的摆动问题一直困扰着人们。起重小车移动时,由于吊重惯性力的存在,将引起吊重的大幅摆动,为了避免对吊重摆动的激励,起重机操作人员必须放缓动作,使这些摆动不会引起安全事故和对起重机结构的破坏,这样大大降低了装卸和转运效率[2-3]。
文献[4]采用延迟反馈和模糊控制策略对龙门起重机和塔式起重机进行防摇控制,延迟反馈加大了系统阻尼;文献[5]采用输入整形法和数字滤波器对桥式起重机进行控制,证明了输入整形法在抑制吊重摆动上比数字滤波器响应更快;文献[6]将输入整形算法应用于集装箱起重机防摇控制中,与传统单次加速相比,输入整形法对较小频率变化具有鲁棒性。
本文利用龙门起重机的数学模型,研究了基于输入整形(inputting shaper,IS)法的龙门起重机吊重防摇控制。
1 龙门起重机吊重动力学模型
设小车沿吊臂水平运行,其加速度为a(t),x为小车的位移,l为钢丝绳的长度,m为吊重的质量,θ为吊重的摆角,其物理模型如图1所示,相应吊重摆动数学模型:

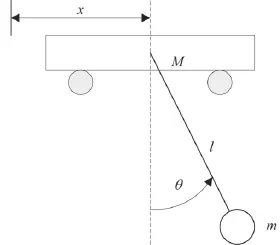
图1 龙门起重机物理模型
2 输入整形控制
输入整形法是一种前馈控制技术,广泛的应用于龙门起重机控制。这项技术是将系统的输入与整形器中产生的一系列脉冲作卷积,结果作为控制系统的输入来驱动系统,达到减小残余振动的目的。输入整形器的参数是通过解一组限制方程来获得,根据不同限制方程就可以设计出不同整形器来限制系统残余振动[7-8]。残余振动的幅值可以表示为:


ω——系统固有频率;
ζ——系统阻尼系数;
n——整形中的脉冲数;
Ai,ti——第i个脉冲的幅度和时间;
tn——最后一个脉冲的时间。
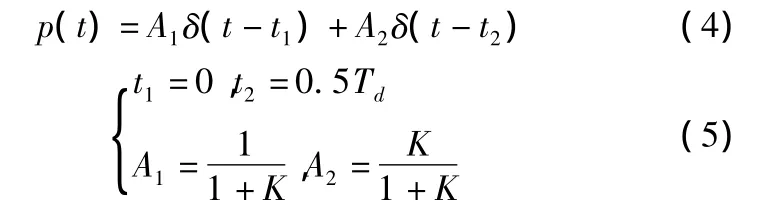
目前用于闭环系统的输入整形器主要有ZV整形器,限制方程为V(ω,ζ)=0。由于整形器有时间延迟,通常取第一个脉冲的时间t1=0,同时为了使整形前的输入和整形后的输入驱动系统产生相同的运动,脉冲幅值必须满足

对于具有两个脉冲的ZV整形器,其脉冲输入序列为
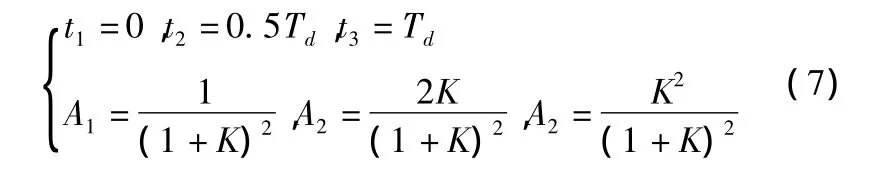
理论上,如果起重机在作业过程中悬索长度、线性阻尼不变,即系统(1)的模型参数ω,ζ保持为恒定值,ZV法可以在0.5个理论振荡周期内,即0.5Td内完全消除由于起重机小车加速所引起的吊重摆角的波动。而在实际起重机作业过程中,系统模型参数尤其是与悬索长度相关的ω的变化不可避免,这就对ZV法在实际的起重机摆角波动抑制控制中的应用带来了局限性。为了减少ZV法对模型参数的敏感性,学术界提出了ZVD法(Zero-Vibration and Derivative Shaper,ZVD)。ZVD法在ZV法的基础上,增加了V对ω的变化率在ω与IS中的系统模型频率ωm相等处为0的约束条件:

与V(ω,ζ)=0约束条件一起可以确定三脉冲ZVD法的5个参数:
ZV法消摆的能力可以看做是正弦信号的叠加过程,如图2所示。如果两个幅值相同、频率相同的正弦信号它们之间以合适的相位叠加在一起,所产生的组合将没有振荡,即实现消摆。
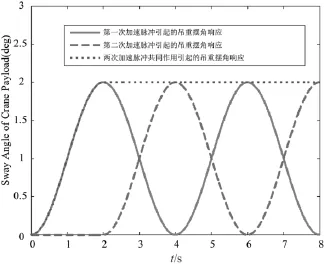
图2 输入整形算法消摆原理
3 仿真
根据龙门起重机数学模型和输入整形算法,在Matlab/Simulink中构建龙门起重机仿真框图如图3所示。
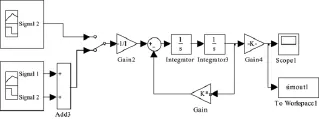
图3 龙门起重机仿真原理图
1)定摆长仿真实验 当吊重绳长l为24.849 m,阻尼比为0,输入加速度为1 m/s2,将ZV、ZVD信号和未整形信号加到图3控制系统中,对龙门起重机进行仿真,吊重摆角的响应结果如图4所示。
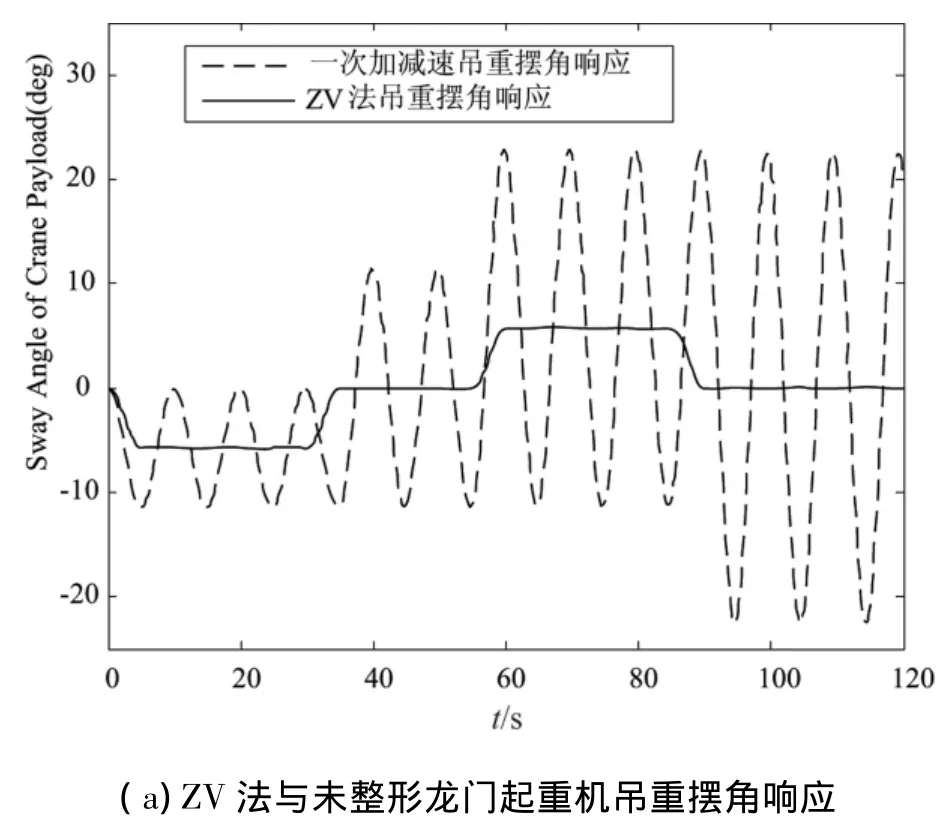
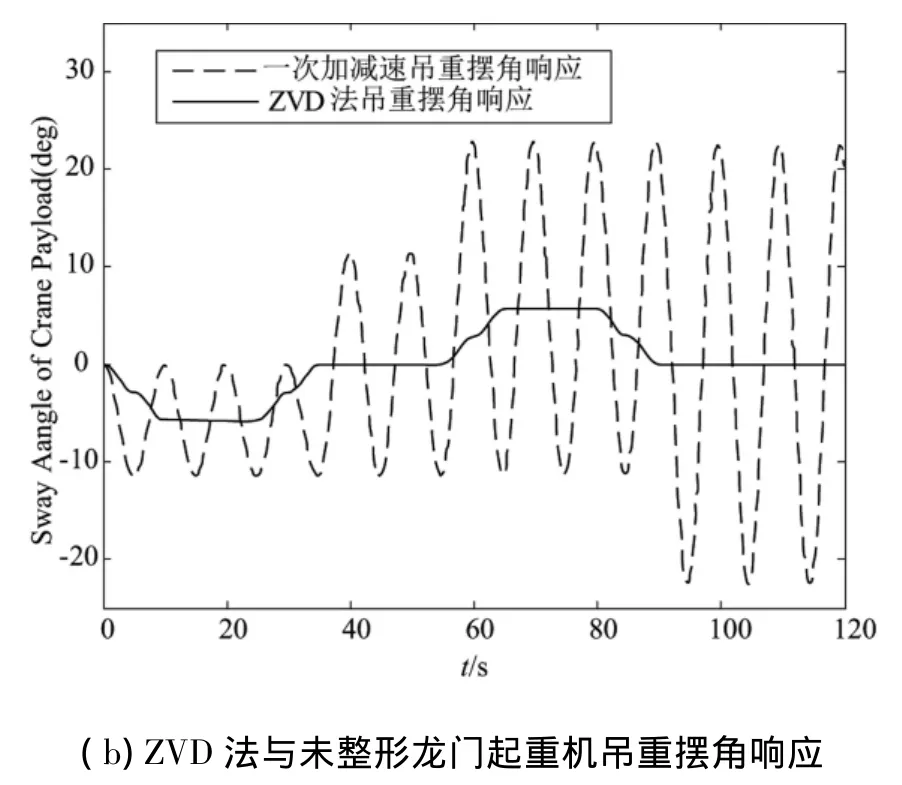
图4 龙门起重机吊重摆角响应
从图4中可以看出,当未整形的输入加到系统中,吊臂定位后负载会产生等幅摆动,而将两种经过整形后的输入信号加到系统中后,负载在整形输入作用结束后基本实现零残余摆动,但经ZV整形后负载的定位和消摆时间都比ZVD要短。
2)变摆长仿真实验 当原吊重绳长l增加25%即为31 m时,阻尼比为0,输入加速度为1 m/s2,采用ZV法和ZVD法对龙门起重机进行仿真,吊重摆角的响应结果如图5所示。
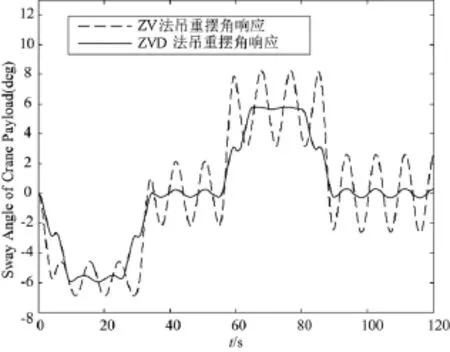
图5 两脉冲输入整形与三脉冲输入整形龙门起重机吊重摆角响应
从图5中可以看出,将两种经过整形后的输入信号加到系统中后,负载在ZVD法输入作用结束后的残余摆动远小于ZV法,说明ZVD法对吊重摆长变化的鲁棒性优于ZV法。
4 结语
通过对龙门起重机在输入整形前后的分析,输入整形法可以抑制吊重残余摆动,在控制上ZVD法对吊重摆长变化的鲁棒性优于ZV法,而在定位和消摆时间上ZV法比ZVD法要短,在Matlab/Simulink中的仿真结果验证了输入整形策略对吊重防摆控制的有效性。
[1]黄大巍,李风,毛文杰,等.现代起重运输机械[M].北京:化学工业出版社,2006.
[2]自传悦.岸边集装箱起重机吊具减摆装置[J].起重运输机械,2005(08):23-24.
[3]林贵瑜,杨新顺,渝叶平.塔式起重栅吊重摆动的控制[J].建筑机械化,2006(11):34-36.
[4]Hanafy M.Omar.Control of Gantry and Tower Cranes[D].Virginia Polytechnic Institute and State University,2003.
[5]Ziyad N.Masoud,Mohammed F.Daqaq.A Graphical Approach to Input-Shaping ControlDesign for Container Cranes With Hoist[J].IEEE Transactions on Control Systems Technology,2006,Vol.14(6):p1070-1077.
[6]William Singhose and Joshua Vaughan.Reducing Vibration by Digital Filtering and Input Shaping[J].IEEE Transactions on Control Systems Technology,2011,Vol.19(6):1441-1420.
[7]Neil C.Singer,Warren P.Seering.Preshaping Command Inputs to Reduce System Vibration [J].ASME Journal of Dynamic Systems,Measurement,and Control,1990,Vol.112,p.76-82.
[8]吴军,李铁民,唐晓强.平面并联机构的残余振动控制[J].机械工程学报,2006,42(11):49-53.
