滑模控制器控制降压型直流-直流转换器
2013-10-20甘家梁熊曾刚王光伟徐翠琴
甘家梁,熊曾刚,王光伟,徐翠琴,李 骥
(湖北工程学院计算机与信息科学学院,湖北 孝感 432100)
0 引 言
开关式电源转换器具有大负载电流范围以及高转换效率的优点,但是电路中采用电感以及电容当作能量传递的组件,配合功率晶体管当作开关切换,因此输出电压具有纹波[1].同时,电源的负载多数是感性负载,对电源输出的扰动时刻存在着,因此希望寻求一个解决方式,以降低或消除输出电压纹波和干扰的影响.常规直流-直流(Direct current-Direct current,简称 DC-DC)变换控制电路采用PID (Proportional-integralderivative,简称PID)或者微处理器电路等经典的控制策略,产生脉冲宽度调制 (Pulse width modulator,简称PWM)波形进行控制,这种控制策略是一种基于小信号模型的方法.然而在实际控制系统中,DC-DC转换器受到自身参数的影响,在大信号扰动下,如果负载的变化大,用小信号进行控制的系统输出结果就与系统响应特性不一致,因此小信号分析方法在DC-DC转换器的控制策略中有先天不足.由于受开关量的控制,DC-DC转换器在工作过程中的控制量在两个子拓扑之间来回切换,具 有变结构的特点[1-2].滑模控制(Sliding Mode Control,简称SMC)技术拥有响应快速,设计简单,以及对系统的不确定性或外在干扰具有稳健性(robustness)等优点,是一种具稳健性的控制设计方法,并且通过适当地选取控制器的参数设定,设计者可以调整系统输出追踪理想值的收敛速度,因此设计上更灵活.变结构控制的设计思想就是利用开关信号0/1变更控制律,其设计理念非常适用于具有非线性特性的DC-DC转换器,并具有很好的鲁棒性能[1-3].本研究针对PWM的降压型转换器提出以不同状态为变量的数学模型,运用比例积分微分修正滑模控制法则作为控制器的设计,仿真结果证明控制器对于系统输出电压具有不随负载电流变动而变化的特性,同时对于系统参数变化亦具宽广的鲁棒性.
1 降压型DC-DC变换器控制方法分析与建模
1.1 滑模变结构控制策略分析
滑模控制也称变结构控制,其特点在于其利用不连续的控制输入,使得闭合回路系统轨迹最后会被限制在一个预先设计好的滑模面(sliding surface)上,而闭合回路系统的动态行为可由滑模面来规范[4-5].一般来说,滑模控制其拥有响应速度快、容易实现,以及对于模型不确定性或外在干扰具有强健性的优点.因此,滑模控制策略对于具有变结构特点的DC-DC变换器特别适用,并可以获得良好的鲁棒性和瞬态特性.
对一个控制系统要实现滑模控制,系统的设计必须满足存在条件、到达条件和稳定性.本文通过分析二阶相变量控制系统,来说明这三个基本条件的含义[2-3,5].假设控制系统的状态方程为

f(·)是一个n维矢量函数,x为系统的状态矢量,u为系统的输入控制信号.发生结构状态转换定义在切换面s(x,t)=0处,即

要使系统状态轨迹在滑模面s(x,t)=0上作来回切换运动,必须保证系统的控制矢量f+和f-在s(x,t)=0的两侧处的方向指向切换面s(x,t)=0.

在控制输入信号为u+和u-时,如果系统在稳定状态时对应的工作点x+和x-分别处于u-和u+的作用空间,则可以保证工作系统在控制量u的作用下,不论初始状态如何都可到达控制滑模面,并沿滑模面滑动至原点.
DC-DC转换器是一个分段线性系统,即双线性开关网络,它的状态方程为

式(3)中,xT=[U0,iL],Uo为电容电压,iL为电感电流,A为系统状态矩阵,B为控制矩阵.
选取滑模控制的切换函数为

式(4)中,α>0为滑模系数,e=Uref-γU0为系统的输出误差电压,Uref是系统所期望的参考输出电压.
采用直接法(开关控制信号是根据切换函数的符号直接产生),选取控制律为

则滑模状态的存在条件和能达条件是

当DC-DC转换器选取的切换函数式(2)满足存在条件和能达条件式(4)时,采用控制律式(3)可以实现方程式(1)的滑模变结构控制,即闭环控制转换系统不论始于何种初始状态,其运行状态轨迹总可以在有限时间内到达滑模面,并沿滑模面运动,最终逐渐稳定于相平面原点(闭环系统平衡点).
1.2 不确定性负载的PWM降压型DC-DC转换
器电路动态数学模型的建立
降压型DC-DC转换器采用的滑模电压控制器,系统工作在电流连续导通模式下的线性平均等效电路模型可用图1表示.
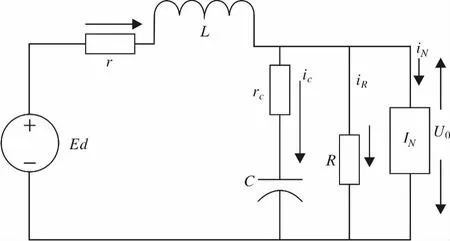
图1 PWM降压型DC-DC转换器等效电路Fig.1 Equivalent circuit of PWM Step-Down DC-DC converter
为了保留积分环节来消除误差,状态变量可以取反馈输出电压的误差,反馈输出电压误差的变化率即反馈电压误差的微分和反馈电压误差的积分.其数学模型状态方程式如下[4-6]:
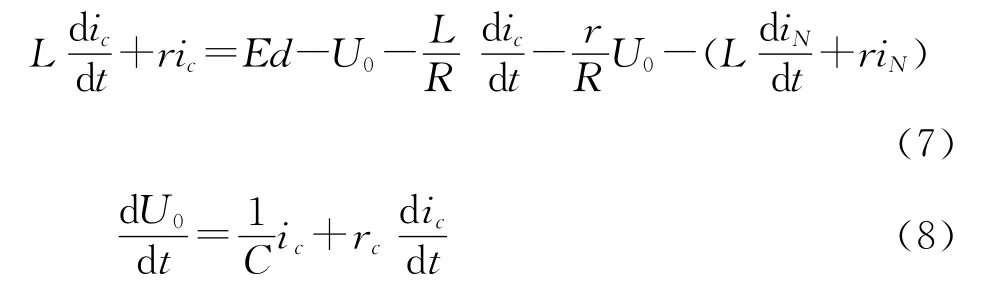
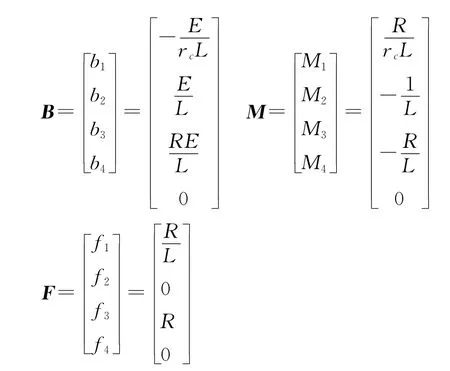
式(7)与式(8)中:iM是流经等效固定负载电阻的电流,E为直流输入电压,iN为等效不确定负载电流,包括参数变动、负载变动及噪声等所引起的不确定电流,d为工作周期(0≤d≤1,可通过由硬件电路设置限制器加以限制),U0为转换器输出电压,R为等效固定负载电阻,r为电感的等效串联电阻,rC为电容的等效串联电阻.
解式(7)与式(8)可得:
控制系统为使输出电压能稳压于电压值Uref,因此设误差电压为Ue=U0-Uref,所以Ue=U0.
为了使得控制系统稳态误差电压Ue为零,系统的状态变量用如下数学公式描述:

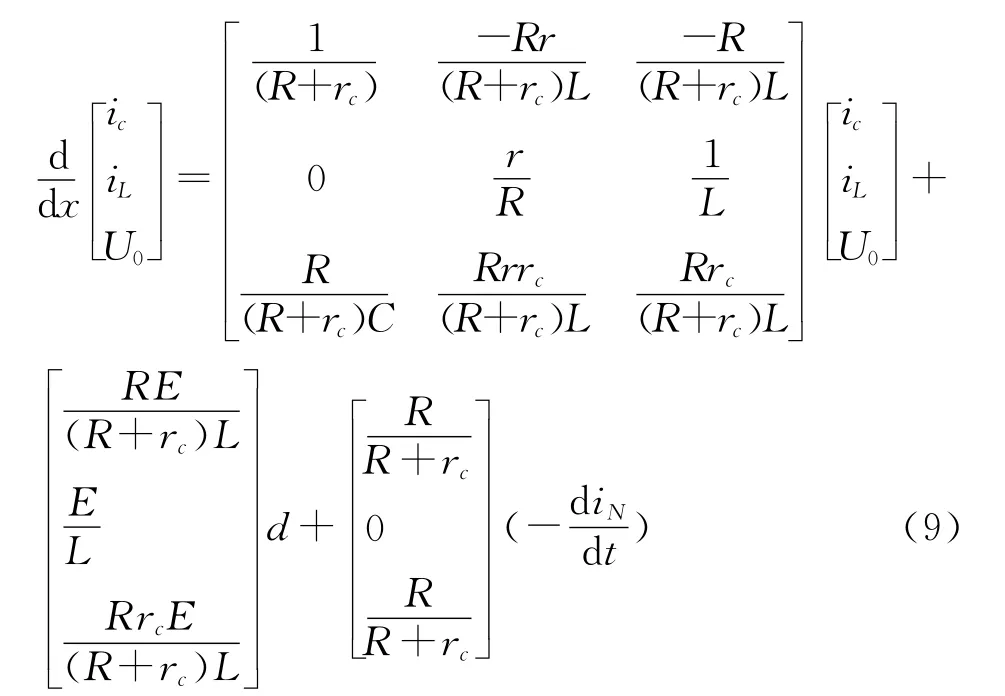
则误差状态方程如下式表示:
是对图1电路的求解,为了求解的方便对非线性电路进行线性化处理,通过建模得到一系列线性方程公式:
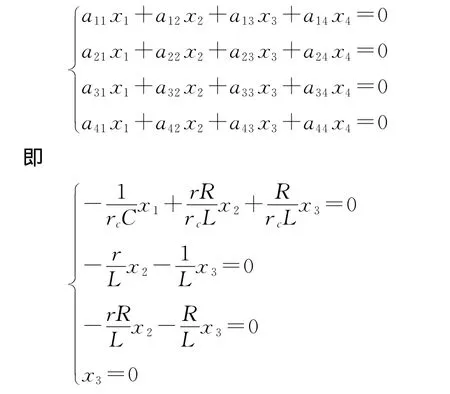
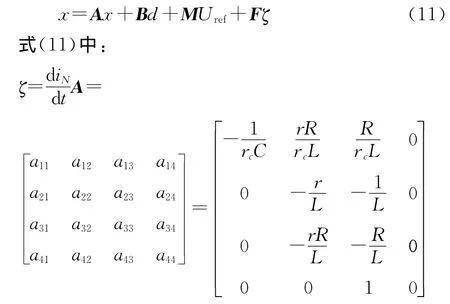
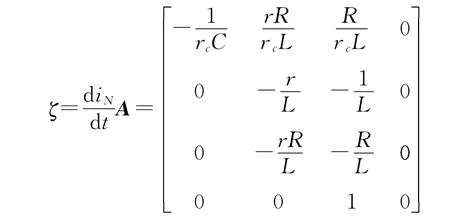
对电路方程建立系数系数矩阵A,施行初等行变换变为行最简形矩阵,为了下面对电路进行稳定性分析,对系数矩阵A在等效不确定负载电流iN情况下进行微分变换,就得到方程:
1.3 滑模型PID控制器的设计
在设计滑模PID控制器时,通过选取合适的切换函数s,使PID调节器输出的三个参数kP、kI、kD最优化,从而使转换器输出的电压误差收敛并稳定在零值附近[4-7].降压型 DC-DC 转换器的数学模型以状态方程式(11)为基础,以工作周期d为控制输入信号,运用滑模控制法则来改善PID控制法则.选择控制滑面方程如下[6-9]:

式(12)中kp、ki、kd为比例积分微分控制器三个系数.
将式(11)代入式(12)得:
控制系统输入信号d定义分为两部分:

其中deq为等效控制输入信号,dn为非线性开关控制输入信号.
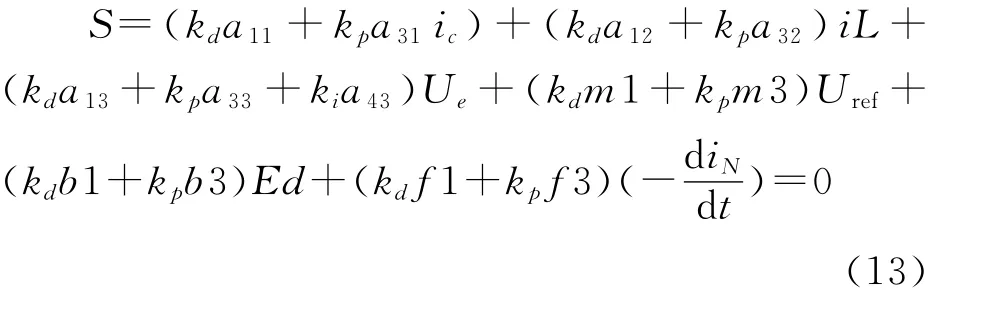
因此,由式(13)得到控制信号d表示如下:
控制信号d介于0与1之间.可由硬件电路设置限幅器加以限制.
综合上述公式可得:

设dn=-δsgn(S)并代入式(16)中得:

将滑模PID控制面S与式(17)相乘得:
则SS=-δ′|S|<0符合滑模控制法则中的迫近滑模条件,若取李雅普诺夫(Lyapunov)函数U=,则由左式微分可得U=SS=-δ|S|<0[7],可推论本控制系统在全域是渐近稳定的[9-10].
2 电路仿真与讨论
单相电源转换器与控制电路如图2所示,电路元件参数设计如下:等效固定负载电阻R为10Ω,电感L=1mH,电感的等效串联电阻rL是0.2Ω,电容C=10μF,电容的等效串联电阻rC为0.003Ω,直流输入电压E为20V,滑模控制修正PID参数设计为kp=0.063 2,ki=100,kd=1。
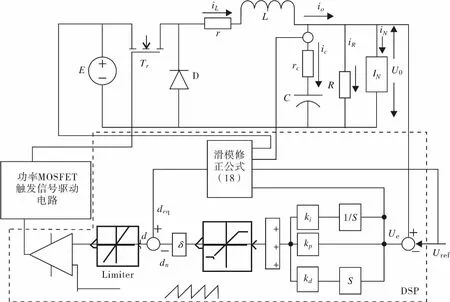
图2 单相电源转换器控制电路框图Fig.2 A circuit block diagram of Single-phase power converter
实验中经调整控制器滑模平面S参数后的输出电压瞬时响应图如图3所示,滑模面S参数调整为临界阻尼时,稳定时间约3ms;过阻尼时,稳定时间约5ms;欠阻尼时,稳定时间约3ms.仿真显示无滑模修正PID控制器时输出电压约有0.8V的稳态误差.滑模修正后的PID控制器的仿真结果如图4~7所示.由图4观察得知,当在t=0.02s时,负载电流由1A增加至3A,t=0.03s时再由3A恢复至1A时,输出电压的变动约0.01V.由图5及图6可知,当输入电压E变动时,输出电压的变动量约0.01V.图7为转换器输出电压的跟踪响应图,当t=0.02s时参考电压由10V调至15V,t=0.03s时参考电压再由15V调回10V,其间输出电压约有0.8V的超越量.
从仿真结果分析可知,滑模PID控制器是通过滑模面S修正PID的参数.转换器经由选择状态变量所设计的控制器运行后,可以获得最适当的输出电压动态响应.当滑模面S调整在过阻尼时系统有较大的输出电压超越量,但相对的稳定时间也愈长.控制延迟量δ调整越大,滑模面S越趋近零,对系统的鲁棒性愈有利,输出的稳度误差值越小,但使S的切换速度相对的变快,将会使计算量增大.如选择滑模面为欠阻尼的控制器,则系统的上升时间变快,但超越量加大,并有振荡的情况发生.虽然滑模控制中,由于切换的关系轨迹并不会完全落在滑模平面上,相对的就无法到达平衡点,但亦可通过由PID滑模控制中积分器的关系,减少稳态误差.而无积分器时,虽然上升时间变快,且无超越量的出现,却使系统输出电压误差增加.转换器经两种不同模型下(数学模型中考虑iL和不考虑iL两种条件)所设计的控制器控制后,均有良好的性能表现,但电感电流传感器的增加,使成本相对的提高,因此在做单相降压型DCDC控制器的设计与实践上应选择状态变量较少的模型.
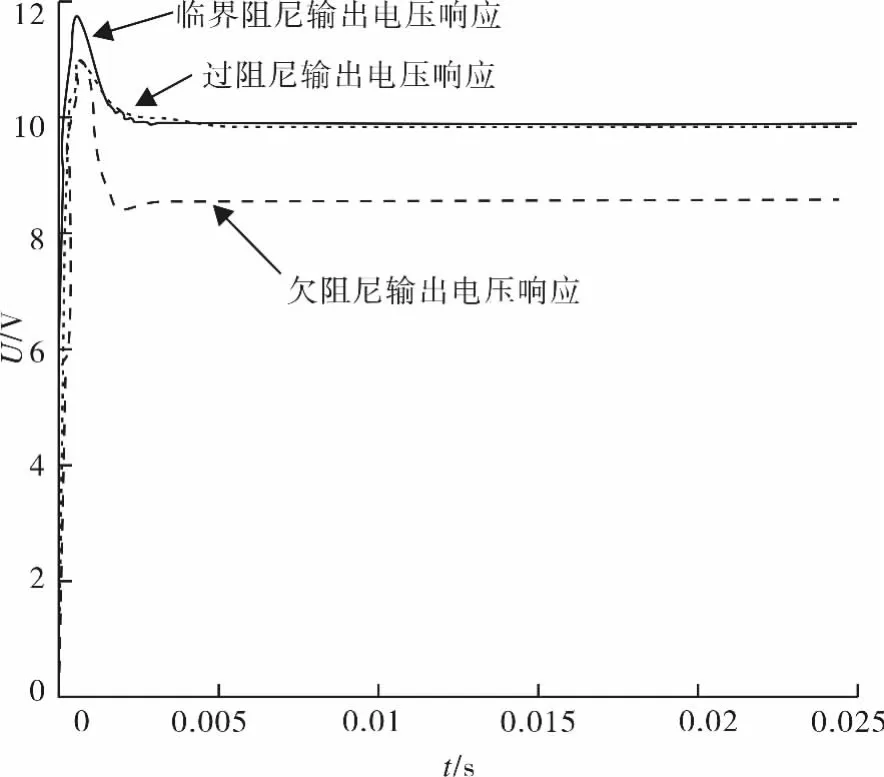
图3 滑模控制平面S阻尼输出电压响应图Fig.3 Output voltage response diagram for Sliding mode control plane Sdamped
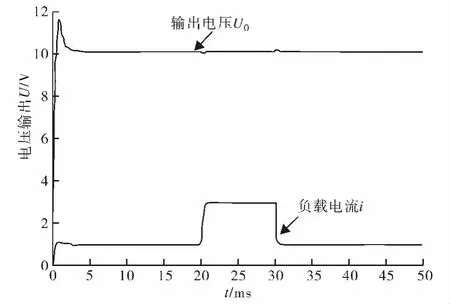
图4 t=0.02s时负载电流输出电流响应图Fig.4 The output current response diagram when the load current is increased from the 1Ato 3Aat t=0.02s
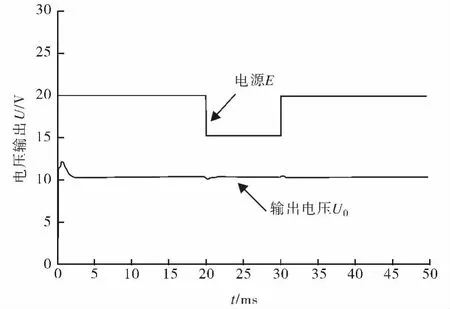
图5 t=20ms时E变化时的输出电压响应图Fig.5 The output voltage response for E is given by at t=20ms and at=30ms
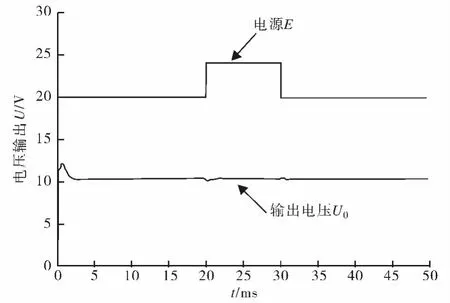
图6 t=20ms和t=30ms时E变化的输出响应图Fig.6 The output voltage response for Eis given at t=20ms and at=30ms
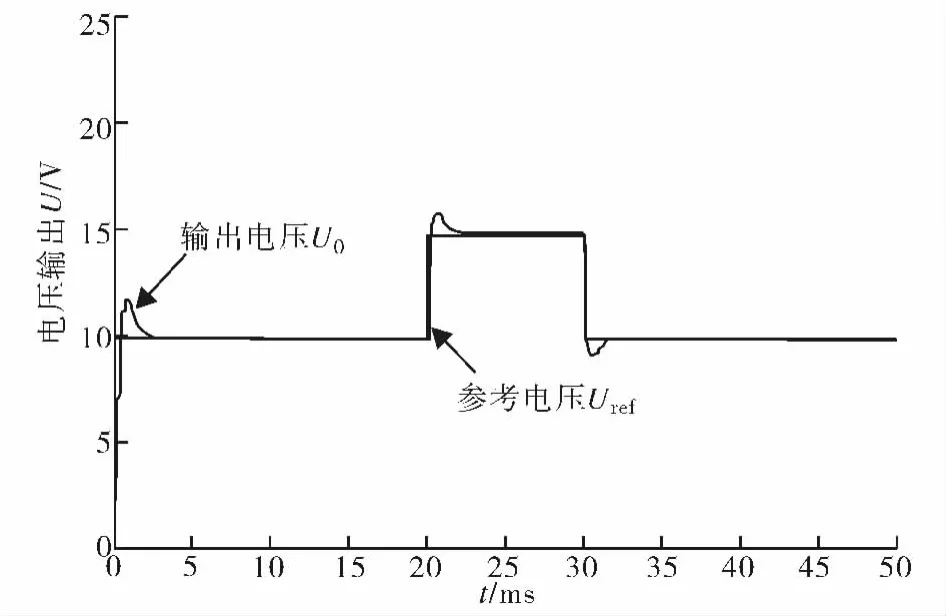
图7 t=20ms和t=30ms时参考电压输出响应图Fig.7 The output voltage response for Reference voltage is given at t=20ms and at=30ms
3 结 语
以上讨论单相降压型DC-DC转换器的滑模PID控制器的设计.经仿真分析可得所提出的滑模PID控制器均能通过调整滑模中滑面参数S来调整优化PID控制器的控制参数,提高PWM调制器的效果,使电源转换器获得最佳的输出电压动态响应,对于输入电压与负载电流变动时,电源转换器都有优越的鲁棒性,而输出电压对于参考电压的跟踪,也能有良好的性能表现,但考虑控制器的计算复杂度与测量设备的成本,设计状态变量较少的控制器,是较佳的选择[11].滑模PID控制器不但可以提高系统对不确定负载的适应性,而且增强了系统在大信号扰动时的鲁棒性,将其应用于开关电源转换器中具有特殊的优势.
[1]夏元清,付梦印,邓志红,等.滑模控制和自抗扰控制的研究进展[J].控制理论与应用,2013(2):137-147.XIA Yuan-qing,FU Meng-yin,DENG Zhi-hong,et al.Recent developments in sliding mode control and active disturbance rejection control[J].Control Theory & Applications,2013(2):137-147.(in Chinese)
[2]尹勇,周祖德,刘泉,等.基于滑模变结构控制策略的直流斩波器设计[J].系统工程与电子技术,2009(9):2177-2180.YIN Yong,ZHOU Zu-de,LIU Quan,et al.Design of DC-DC chopper based on sliding mode control theory[J].Systems Engineering and Electronics,2009(9):2177-2180.(in Chinese)
[3]胡跃明.变结构控制理论与应用[M].北京:科学出版社,2003.HU Yue-ming.Variable structure control theory and applications[M].Beijing:Science Press,2003.
[4]倪雨,许建平.控制受限滑模控制Buck变换器优化设计[J].电子学报,2013(3):555-560.NI Yu,XU Jian-ping.Optimal design of sliding mode control buck converter with bounded input[J].Acta Electronica Sinica,2013(3):555-560.(in Chinese)
[5]张黎,丘水生.滑模控制开关变换器的分析与实现[J].微电子学,2005(3):260-268.ZHANG Li, QIU Shui Sheng. Analysis and implementation of switching converter with sliding mode control[J].Microelectronics,2005(3):260-268.(in Chinese)
[6]张合新,范金锁,孟飞,等.一种新型滑模控制双幂次趋近律[J].控制与决策,2013(2):289-294.ZHANG He-xin,FAN Jin-suo,MENG Fei,et al.A new double power reaching law for sliding mode control[J].Control and Decision,2013(2):289-294.(in Chinese)
[7]文小玲,李凤旭,易驰,等.并联型有源电力滤波器的电流跟踪控制实现方法[J].武汉工程大学学报,2013,35(5):73-77.WEN Xiao-ling,LI Feng-xu,YI Chi,et al.Current tracking control implementation method for shunt active power filter[J].Journal of Wuhan Institute of Technology,2013,35(5):73-77.(in Chinese)
[8]王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2007:154-158.WANG Zhao-an,HUANG Jun.Power electronic technology [M].Beijing:China Machine Press,2007:154-158.
[9]崔士杰,汪建华.基于 MATLAB的单相全控整流电路功率因数测定[J].武汉工程大学学报,2010,32(1):90-93.CUI Shi-jie,WANG Jian-hua.Measurement based on MATLAB of power factor of fully controlled singlephase commutation[J].Journal of Wuhan Institute of Technology,2010,32(1):90-93.(in Chinese)
[10]祝乃杰,陈蓓,牛玉刚.含有输入时滞的不确定T-S模糊系统的滑模控制[J].2012(10):622-628.ZHU Nai-jie,CHEN Bei,NIU Yu-gang.Sliding mode control for uncertain T-S fuzzy systems with input delays[J].Information and Control,2012(10):622-628.(in Chinese)
[11]甘家梁,李志敏,徐翠琴,等.直流电机速度控制比较[J].武汉工程大学学报,2013,35(5):78-85.GAN Jia-liang,LI Zhi-min,XU Qin-qin,et al.Comparative study on speed control of current motor[J]. Journal of Wuhan Institute of Technology,2013,35(5):78-85.(in Chinese)
