基于ARM的太阳跟踪控制系统设计
2013-10-17刘路路黄祥康邱选兵魏计林
刘路路,黄祥康,邱选兵,魏计林
(太原科技大学应用科学学院,山西太原 030024)
随着工业和经济的发展,人们对能源的需求逐渐增大。太阳能是一种新型的清洁能源,如何充分利用这种新型绿色能源,实现人类社会的可持续发展,成为了当今研究的热门课题之一。
相关理论和实验数据表明,在使用相同功率太阳能电池板的前提下,跟踪式太阳能系统相比固定式太阳能系统的光伏转换效率要高出约37.7%[1-3]。由此可见,在实际应用中使用跟踪式的太阳能光伏发电系统,将大幅度提高发电量,增加社会效益。
目前国内外的太阳跟踪控制系统主要分为两种[4]:一是利用视日运动法算出任一时刻的太阳方位角和高度角,再驱动电机将电池板转向太阳位置,但该方法不能避免天气条件的影响;二是利用传感器采集光信号,将光信号处理后得到太阳偏移位置,再将电池板指向太阳位,而此方法的不足在于能否将跟踪系统从日落角度恢复到日出角度[5]。因此文中采用上述两种方法相结合的基于低功耗Cortex-M3核的ARM处理器,实现了高精度跟踪定位太阳的功能,首先CPU通过GPS获取到控制系统的经纬度和实时时钟,再根据视日运动法理论计算出太阳位置,驱动电机使电池板指向太阳,然后利用四象限传感器信号进行修正;同时采用独立的光强传感器,获得实时太阳光照,从而以天气情况判断是否停止跟踪系统,节约控制装置能耗。
1 太阳跟踪原理
1.1 视日运动轨迹
根据天文学知识,地球围绕太阳公转周期为一年,地球本身也在不停自转,而自转周期为一天。地球的自转轴与其围绕太阳公转平面始终为23.5°,由此形成了一年四季的变化。
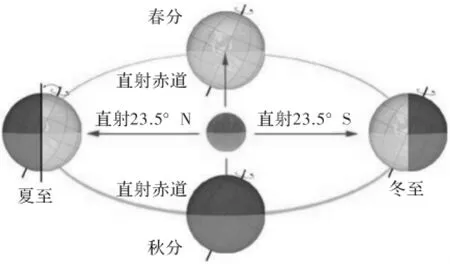
图1 地球围绕太阳运动示意图
由图1可知,一年当中,太阳直射点的纬度始终在23.5°S到23.5°N之间变化。将某天太阳直射点的纬度称为太阳赤纬角δ,δ(°)是天数n的函数,δ与 n之间的函数关系为

式中,n为一年当中的天数,自1月1日起算。如2月5日,n=36。
地球自转周期为24 h,假设地球不自转,则在地球上的观察者看来是太阳每小时向西移动15°,定义正午的时角ω(°)为0°,则一天之中的时角可用时角公式算出

式中,h为24小时制的时间。当ω为正数时表示太阳偏东,为负数时表示太阳偏西。
在太阳跟踪系统中,主要用两个参数表示太阳位置:太阳高度角α(°)和太阳方位角Α(°),如图2所示。太阳高度角α指太阳照射某点的光线与照射点所在地平面的夹角,太阳方位角Α指太阳照射某点的光线在地平面上的投影与正南方的夹角,计算公式为[5-6]
式中,δ为太阳赤纬角;ω是时角;φ是当地纬度
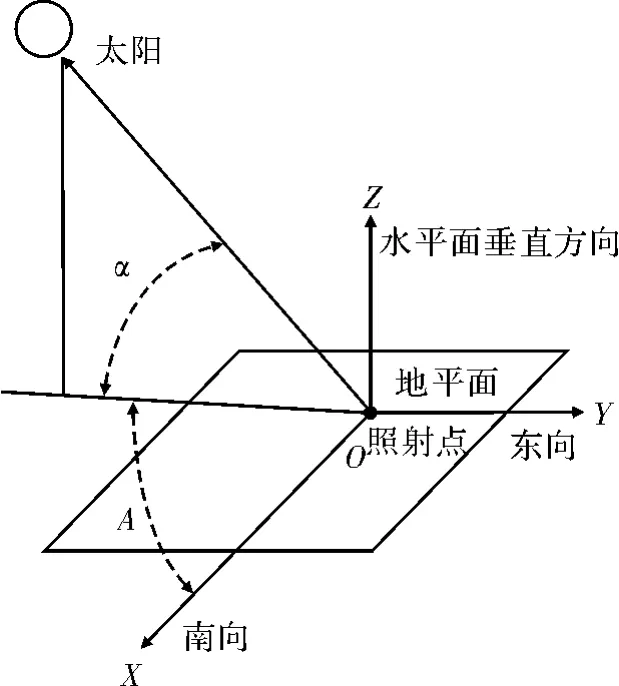
图2 太阳高度角与太阳方位角
1.2 传感器跟踪法
在太阳追踪系统中使用最为广泛的是四象限光电探测器。它是将4个性能完全相同的硅光电池或光电二极管按直角坐标要求排列的光电探测器件[7]。安装时将探测器的感光面与太阳能电池板放在同一平面上。当太阳光垂直射到太阳能电池板时,探测器上的光斑位于正中心,如图3所示。
图3 阳光直射时光斑位置
当太阳偏移一定位置时,则探测器的光斑则不再与中心重合,设光斑位置相对原点位置为 Δx、Δy,如图4所示,传感器输出为
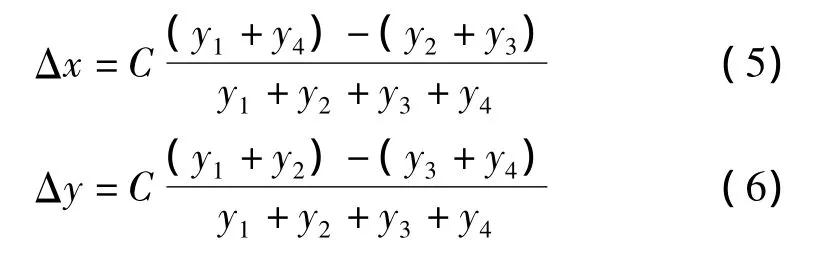
式中,y1~y4是四象限探测器第Ⅰ~第Ⅳ象限的输出;C是由系统决定的常量。
图4 阳光斜射时光斑位置
系统根据Δx、Δy的值调整太阳能板的方向,当Δx=0、Δy=0时,表明探测器对准太阳。由于探测器感光面与太阳能板共面,此时阳光直射太阳能电池板。
2 跟踪机构设计
系统的跟踪机构是实现太阳跟踪的重要部分,是电机驱动太阳能电池板的主要传动环节。跟踪机构的设计要考虑到转动角度量、转动力矩、传动比以及传动效率等因素。其精密程度也将直接影响到系统的可靠性和跟踪太阳的精度。
目前,太阳跟踪系统有单轴式和双轴式两种。虽然单轴式结构较为简单,但其只有一个自由度,而太阳的运动轨迹不是单一的圆周运动,因此单轴式的太阳能跟踪系统只能简单粗略地跟踪,无法满足设计的要求。综合考虑各种因素,文中采用双轴式跟踪方式,实际制作的跟踪控制模型如图5所示。
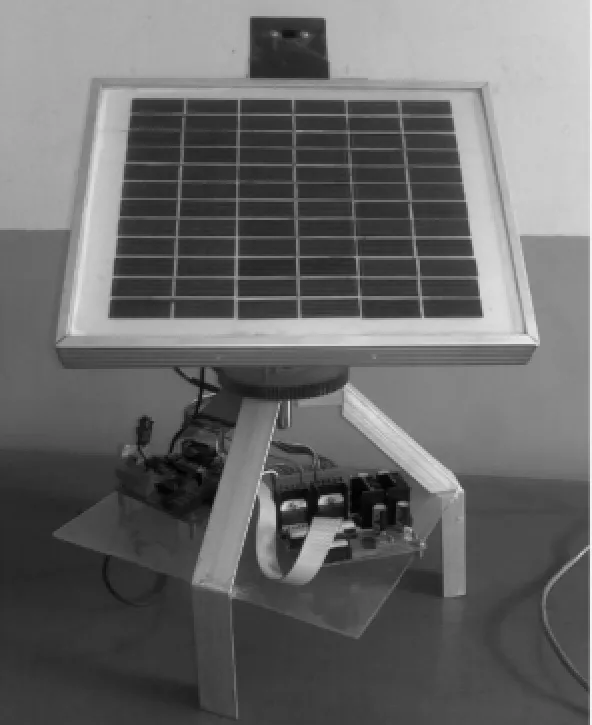
图5 太阳跟踪装置模型图
双轴式太阳跟踪系统机构如图6所示,主要由水平和仰角的控制电机、减速传动齿轮和支架构成。图7是跟踪机构的传动系统示意图。水平控制电机通过减速齿轮带动系统水平旋转,跟踪太阳方位角;而仰角控制电机则改变电池板仰角的大小,跟踪太阳的高度角。设计的水平转动角度控制范围0°~360°,仰角控制范围0°~90°,满足各纬度跟踪要求。
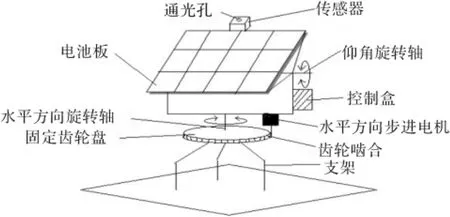
图6 云台结构示意图
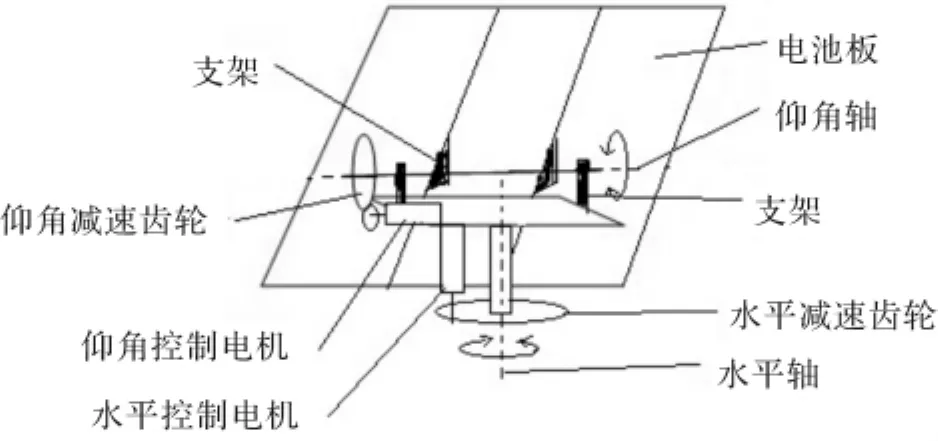
图7 传动系统示意图
3 控制系统
3.1 控制系统硬件设计
根据上述太阳跟踪原理,所设计的高精度太阳跟踪控制系统,其组成如图8所示。控制系统主要由传感器、信号放大电路、通信电路、GPS模块、单片机控制电路、步进电机驱动电路以及机械云台等组成。
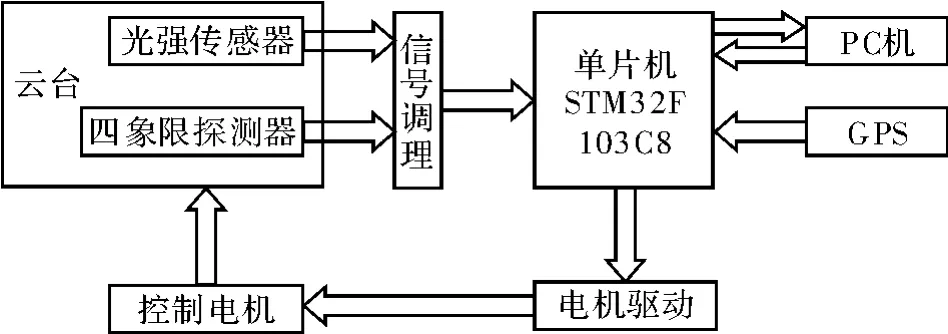
图8 控制系统框图
光强传感器用于检测当前光强,系统根据此光强信号判断是否启动跟踪;四象限传感器的信号通过放大电路进行调整,输出4个象限的电压信号提供太阳位置偏移量;系统采用RS232接口是为了使系统能与PC机通信,如PC机可采集光强信号、太阳方位等信息;GPS模块则是为系统提供纬度和时间;电机驱动是驱动机械云台的水平和仰角的控制电机。
3.2 系统工作原理
系统工作前,将电池板水平方向指向正南位置。通电后,单片机从GPS模块获取纬度和实时时间信息,计算出此刻太阳高度角和方位角后,驱动电机水平和仰角步进电机相应角度将电池板指向正对太阳位置。并检测传感器的信号判断是否已对准,若是,则定位太阳完成,否则需进行角度修正。
角度修正方法:假设进行修正前位置如图9所示,此时太阳光与电池板的法线夹角为φ,单片机从传感器信号计算得到Δx、Δy。首先进行仰角修正,驱动仰角电机产生相应动作使仰角减小,当检测到Δy=0时,仰角修正完成,如图10所示。接着进行水平角修正,当检测到Δx=0时,角度修正完成,电池板正对太阳。
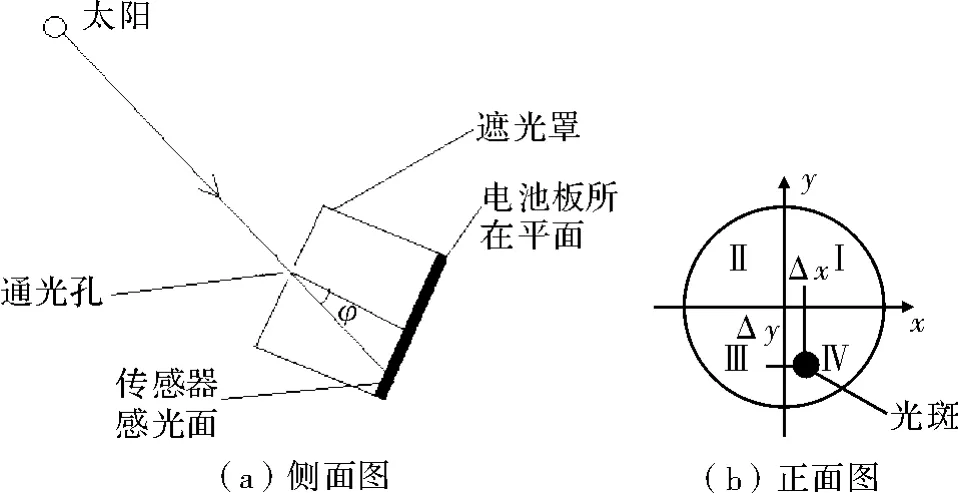
图9 角度修正前位置示意图
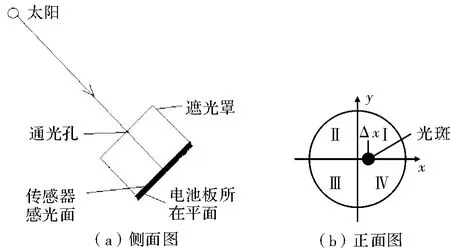
图10 仰角修正完成时示意图
3.3 系统软件设计流程
根据系统工作原理,所设计的软件流程主要包括CPU解码从GPS模块接收的数据,得到纬度和时间信息,经计算后得到太阳高度角和方位角并作出相应驱动、角度修正及判断光强等,其系统控制流程和角度修正流程如图11所示。
4 实验与误差分析
图12为2012年10月6日太原市(37.82°N,112.48°E),用式(3)和式(4)求得的太阳高度角和方位角随时间变化曲线。
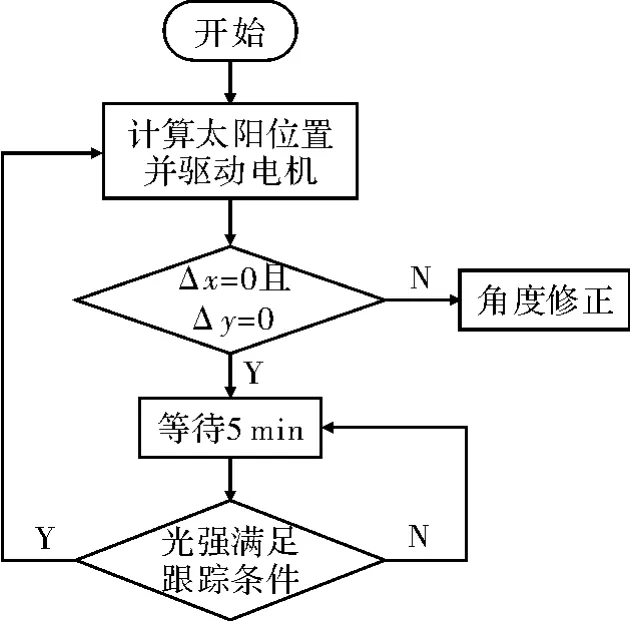
图11 角度修正流程
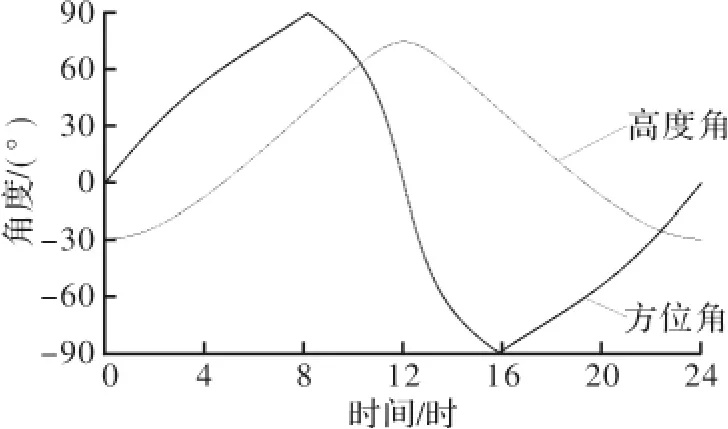
图12 太阳高度角和方位角随时间变化图
表1是2012年12月6日系统在太原市(37.82°N,112.48°E)从8~17点工作得到的实测数据。
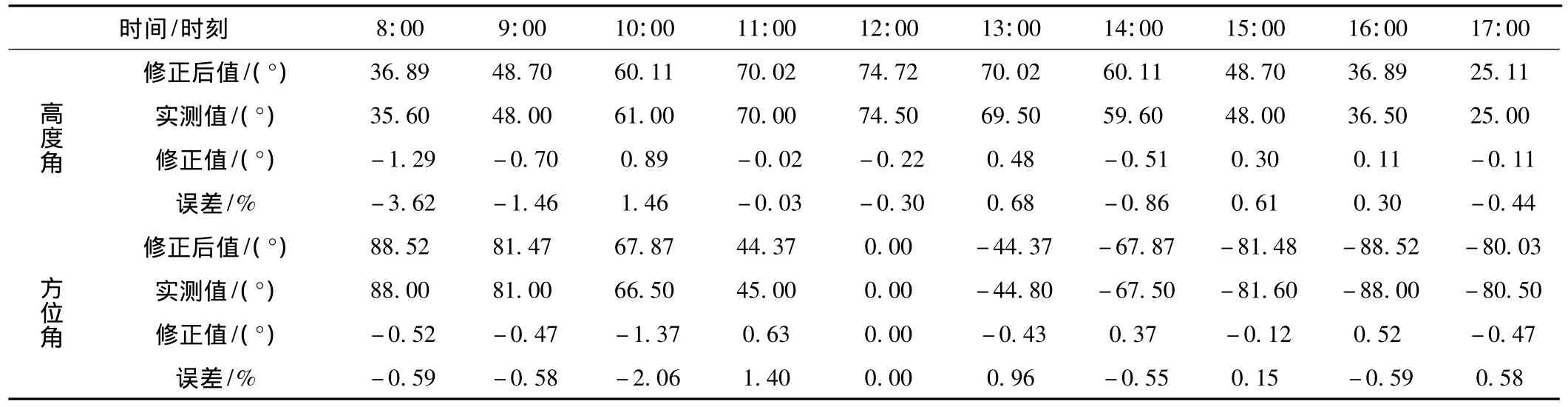
表1 一天之中太阳高度角、方位角的理论值和实测值
由图12可知,太阳高度角在正午12时达到最大值,且以12时为轴对称分布;太阳的方位角在8时以前和16时以后是单调递增,而在8时到16时之间是单调递减。表1中的数据表明,本系统可达±1.5°以内的跟踪精度。
5 结束语
针对使用视日运动轨迹法或传感器单一方法不能准确、合理跟踪太阳的缺点,文中结合其各自优点,设计了基于ARM的高精度太阳能跟踪系统。试验数据表明,此系统可实现±1.5°范围内的跟踪精度,且成本低、可靠性高。
[1]耿其东,李春燕.双轴式太阳跟踪装置控制系统的研究[J].自动控制与检测,2011(3):53-56.
[2]罗来武,顾菊平,茅靖峰,等.基于 Freescale的混合式两轴光伏跟踪控制系统设计[J].微机电,2011,27(9):94-98,102.
[3]裴亮,洪荣晶,孙环阳.基于ADAMS的光伏跟踪机构优化设计[J].机械设计与制造,2011,3(3):57-58.
[4]周培涛,李成贵.基于TMS320F2812的太阳跟踪器设计[J].单片机与嵌入式系统应用,2010(11):64-66.
[5]关继文,孔令成,张志华.高精度太阳能跟踪器控制设计与实现[J].自动化与仪器仪表,2010(3):23-25.
[6]荷晓雷,于贺军.太阳方位角的公式求解及其应用[J].太阳能学报,2008(1):69-73.
[7]吴静,杨懿,潘英俊.用四象限硅光电池和单片机实现太阳跟踪[J].四川工兵学报,2009(1):101-104.
[8]凌好,刘荣忠.基于STM32的太阳自动跟踪控制系统的设计[J].计算机测量与控制,2012,20(2):383-385.