某型炮兵气象雷达探测系统自动寻北标定仪关键技术分析*
2013-10-16仇磊
仇 磊
(解放军陆军军官学院 合肥 230031)
1 引言
某型火箭炮武器系统配备的气象雷达探测系统,是我军新装备的一种高性能的野战机动式气象保障装备,该系统集多谱勒声雷达、风廓线雷达、无线电经纬仪和野战气象仪等多种探测设备于一身,具有技术先进、自动化程度高、保障能力强、探测高度高等特点,是远火武器系统的重要保障装备。为完成气象保障任务,改型气象雷达探测系统在进行探测工作之前或者雷达气象车移动后都必须首先完成寻北标定才能工作,否则风廓线雷达、多普勒声达和无线电经纬仪三大探测系统所测数据均无效。
某型炮兵气象雷达探测系统自动寻北标定仪安装在该型武器系统炮兵气象车上,利用现有数据通信接口,实现气象车寻北自动标定、数据自动采集和处理等自动标定任务。改型自动寻北标定仪采用光纤陀螺作为寻北标定的惯性器件,具有成本低、重量轻、寿命长、功耗低、启动时间短、动态范围大等优点。改型自动寻北标定仪在寻北时,整个惯性测量单元安装在一个高精度程控转位机构上,转位机构的角位置由采集控制单元控制,按其数学模型要求精确转动到相隔90°规定的四个位置上。陀螺仪用来测量四个不同方位上的地球自转角速度,加速度计用来测量输入轴相对当地水平面的倾斜角,所测得的数据经采集电路采集后送入计算单元进行解算,解算后送入显示单元,显示北向角信息和姿态信息。
在该型寻北标定仪中,陀螺漂移和噪声是影响寻北精度的主要因素,数据采集单元的性能(分辨率、精度等)是决定系统性能的重要因素之一。此外,转位控制方案设计是寻北系统中一个极其重要的环节,转位机构的转位精度和恒速控制精度必须满足陀螺寻北的精度要求。当硬件平台和寻北方案确定后,有效的数据处理方法对提高寻北精度起决定性的作用。要提高寻北仪的精度,就必须解决影响寻北精度的诸多关键技术问题。
2 解析式陀螺寻北原理
20世纪中后期,由于军用陆基导航及导弹武器发射对自主、快速对准设备的需求,加上光学陀螺、振动陀螺等非转子陀螺的出现,使解析式陀螺寻北仪技术得到快速发展。解析式陀螺寻北仪是通过测量地球转速在不同方位上的水平分量,再经过一定的数学解算而推导出当地的真北方向。光纤陀螺作为一种高可靠、长寿命的非转子式速率陀螺仪,很适合在解析式陀螺寻北系统中应用。某型炮兵气象雷达探测系统自动寻北标定仪采用了光纤陀螺解析式寻北原理。
将一个单轴陀螺安装在水平转台上,使其输入轴水平,通过转位机构的带动使陀螺依次测出地球转速在两个水平位置的分量ωx和ωy(如图1所示),就可计算出初始方向与真北方向的偏角。
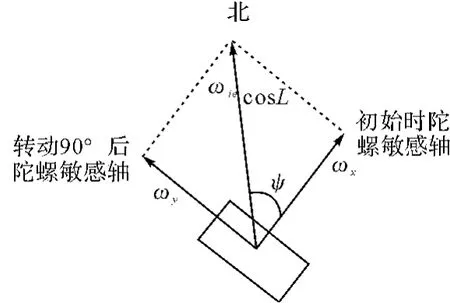
图1 解析式陀螺寻北原理示意图
由于ωx=ωiecosLcosψ,ωy=ωiecosLsinψ,故有:

当ωx≠0时,可以用式(1)算出航向角。当ωx的值接近0时,可以用式(2)计算出ψ。

式中ωie为地球自转角速度;L为测量点纬度;ψ为陀螺初始输入轴与北向的夹角。
3 自动寻北标定仪关键技术研究
3.1 四位置寻北方案
该方案是使光纤陀螺敏感轴分别在四个特定的位置上测量地球转速的水平分量,再通过计算得到载体与北向的夹角,为便于计算,这四个位置选择依次相差90°的4个位置。
在开始寻北时,光纤陀螺处于第一个位置ψ,陀螺在这个位置完成信号采集后,由转位机构带动光纤陀螺依次旋转到(ψ+90°),(ψ+180°),(ψ+270°)的三个位置,并分别在每个位置完成信号采集,根据解析式寻北原理,光纤陀螺在这四个位置的输出为

式中K1为光纤陀螺的标度因数;K01,K02,K03,K04和ε1,ε2,ε3,ε4分别为陀螺在每个位置上的零偏和随机误差。
若忽略短时间内陀螺零偏的变化量及随机误差,可算出陀螺敏感轴与北向的夹角ψ为

可见,四位置寻北方案不仅可抵消光纤陀螺零偏的影响,而且不需要依赖光纤陀螺标度因数的先验值及当地地理纬度值L,从而降低了对光纤陀螺性能指标长期稳定性的要求,是一种较为理想的寻北方案。
3.2 精密转台的精确转位控制技术
四位置寻北方案需要采样陀螺在几个固定位置的输出值,从而解算出方位角。只有控制转台精确转位,才可以精确解算出方位角。转轴的位置和运动精度决定了工作台的端面和径向跳动误差的大小,从而影响加速度计和光纤陀螺的输出信号。运动精度还影响光电编码器的位置精度,进而影响编码器输出信号的相位精度,这些都会最终影响整个系统的寻北精度。以四位置寻北方案为例,转位机构的定位误差是主要的误差源,对寻北结果产生较大的影响,其造成的寻北误差是定位误差的一半。因此在系统设计中要确保转台的定位精度满足陀螺寻北的精度要求,对转台系统中各机械零件的设计和加工要有相应的加工精度要求和工艺措施。一般转台的定位误差要小于寻北精度的五分之一。采用光电编码器作为直流电机位置控制的反馈元件,构成位置反馈系统,对直流电机的定位位置进行修正,可以获得较高的位置精度。
3.3 反馈元件的选择
光电编码器是一种集光学、机械、电子技术为一体的数字检测装置,具有精度高、响应快、抗干扰能力强、性能稳定可靠等显著优点,广泛应用于电机伺服系统中。它把电机的旋转角度以脉冲形式输出,旋转角度值正比于脉冲个数,旋转速度值正比于脉冲频率。
按照输出信号的种类来划分,光电编码器分为绝对式和增量式两大类。绝对式编码器不需要计数器,在转轴的任意位置都可给出与位移相对应的数字转角输出量。优点是固定零点、输出代码是轴角的单值函数、抗干扰能力强、掉电后再启动无须重新标定、无累积误差等;缺点是制造工艺复杂,不易实现小型化。增量式编码器的典型输出为两个相位差为90°的方波信号(A和B)以及零位脉冲信号Z。A,B两相信号的脉冲数标志码盘轴所转过的角度,A,B之间的相位关系标志码盘的转向。计数过程一般有两种实现方法:1)由可编程计数器或微处理器内部定时/计数器实现计数;2)由可逆计数器实现对正反向脉冲的计数。增量式编码器易于实现小型化,响应迅速,结构简单;缺点是掉电后容易造成数据损失,且有误差累积现象。
3.4 数据采集单元设计
数据采集单元主要负责光纤陀螺输出的数字信号的接收及将加速度计输出的模拟信号转换为数字信号。在解析式寻北系统中,对于模数转换器的性能和相应的抗干扰措施有较高要求,需要选用高精度模数转换器来完成A/D转换。
如果加速度计的标度因数Ig=1±0.2mA/g,所采用的匹配电阻为50Ω,设计的测角范围为±15°,则加速度计输出的电压幅值为V=1×50×10-3×sin15°=12.9×10-3V。为了检测加速度计信号的微小变化,需要对信号进行放大。对于微弱信号检测来说,关键措施之一是尽量减小测量过程中引入的观测噪声,而前置放大器则是引入噪声的主要部件之一。低噪声放大器设计的关键是低噪声半导体器件的选择、低噪声电子线路和其工作状态的优化设计,以及减少放大器外来干扰的技术措施。I/V转换后的电压信号接入精密滤波放大电路,实现低通滤波。滤波后的电压信号还必须经过限幅和调理环节转换成与AD采集芯片输入兼容的电压信号才能接入AD的信号输入端。加速度计输出信号经过信号调理电路(放大、滤波)后输入模数转换器。
3.5 陀螺漂移和噪声消除技术
在改型寻北标定仪中,影响寻北精度的主要因素是陀螺漂移和噪声。引起陀螺漂移的诸多因素是带有随机性的,随机漂移误差是系统的主要误差源。光纤陀螺有一定的输出噪声,而且使用中还会受到诸多运载体发动机运行的振动、人员走动及阵风随机吹动等因素对寻北精度的影响。一般认为陀螺漂移主要由常值分量、周期分量和自噪声组成,但是由于各种电路噪声和外部噪声的影响,实际信号中还包含白噪声和有色噪声,用模型描述为

式中εd是陀螺漂移的常值项,短时间内可以用陀螺的零偏来代替,可以通过多位置测试消除;Ω为周期分量的幅值,f为周期分量的频率,θ为初始相位,Δ(t)为均值为零的高斯白噪声,∇(t)为相关噪声。
处理陀螺漂移和噪声的方法主要有时间序列分析、Kalman滤波、H滤波和抗差滤波等。也有基于傅立叶变换或小波变换而建立的数字滤波器,用以剔除信号中的高频部分以达到去除噪声、平滑信号的目的。工程中常采用低通滤波方法处理陀螺数据,其优点是滤波方法简单、易于工程实现、能在一定程度上减少动态干扰的影响,缺点是滤波效果并不理想。抗差估计对异常数据降权处理,一方面限制利用了可用信息,另一方面通过对有害信息赋予零权加以排除,从而保证了观测信息的利用率与估计结果的可靠性。
上述方法只在特定条件下有效,并不能对信号中所有的噪声都能进行比较彻底地处理。因而需要针对具体陀螺的漂移特点,采用适当的估计方法求解最佳估值,或建立随机漂移模型对其进行补偿,从而求得最佳估值。
4 技术指标与试验结果分析
4.1 技术指标
1)“自动寻北标定仪”寻北精度:0.1°;
2)“自动寻北标定仪”寻北时间:≦5min;
3)“自动寻北标定仪”平均故障间隔时间(MTBF):200h,即可以满足部队作战需要;
4)“自动寻北标定仪”平均故障修复时间(MTTR):30min,自动寻北标定仪用于气象车在进行气象探测工作之前,在准备工作充分的条件下,不会影响气象探测;
5)“自动寻北标定仪”工作环境温度:-40℃~+50℃,由于气象雷达工作环境温度是-40℃~+50℃,考虑到与气象雷达在同样环境工作,故工作环境温度相同。
4.2 试验结果分析
对系统进行功能测试,台体能在360°任意位置伺服,且能从一个位置转动到任意一个位置。在0~360°的范围内任选一位置,在同一位置上连续寻北六次,记录每次的输出数据,如表1所示。

表1 寻北数据
按下列公式计算寻北精度:

式中:xi为自动寻北仪第i次采样的结果;n为自动寻北仪采样次数的总和;i为自动寻北仪采样序数,i=1~6;¯x为n次采样的平均值。
由此可以算出寻北标定仪的寻北精度为0.087°,满足技术指标需求。
5 结语
该型寻北标定仪具有轻便、快速、操作简单和性能稳定可靠的特点,在无任何初始定向基准的情况下,均能快速确定北向方位,适合机动作业。而且该装置无需纬度补偿、抗环境干扰能力强、结构上采用模块化,便于安装和维修,为该型气象车的作战使用增加了可靠性保证,提高了某型火箭炮武器系统的气象保障能力。
[1]徐金华,徐卫庆.某型寻北仪系统软件任务调度策略[J].海洋测绘,2011(1):23-27.
[2]王丽芬,谢英.基于光纤陀螺的捷联寻北仪误差分析[J].光电工程,2011(5):24-29.
[3]郑文成,颜俐.基于DSP的动调陀螺寻北导航系统的设计及实现[J].中国舰船研究,2010(1):14-17.
[4]孟乐中,刘青峰.具有倾角补偿的快速寻北仪系统研究[J].战术导弹控制技术,2011(1):34-28.
[5]王立冬,刘军.对位置寻北误差与陀螺数据采样时间的关系[J].中国惯性技术学报,2011(4):16-21.
[6]周乃新,杨亚非.光纤陀螺数据采集系统设计与实现[J].实验室科学,2011(2):21-25.
[7]彭文广,张秀红.浅谈基于单片机的数据采集系统[J].黑龙江科技信息,2010(14):13-17.
[8]党淑雯.光纤陀螺的信号分析及滤波技术研究[D].上海交通大学,2010:25-29.
[9]谷宏强.光纤陀螺捷联惯导系统初始对准技术研究[D].南京理工大学,2009:30-34.
[10]邓慧慧,徐雯,杜志强.模型树在陀螺建模中的应用研究[J].计算机与数字工程,2009,37(6).
[11]白俊卿,张科,卫育新.ARMA模型在光纤陀螺惯导系统寻北中的应用[J].计算机与数字工程,2012,40(8).
[12]查峰,许江宁.一种高精度无定向的光纤陀螺IMU转停标定方法[J].测试技术与应用,2011(4):10-14.
