多无人机系统支持的潜艇协同作战应用研究*
2013-10-16程相东冯金富杜文红
程相东 冯金富 杜文红
(空军工程大学 西安 710038)
1 引言
潜艇具有隐蔽性好,突击能力强的优点,可长期潜伏在水下,具有较强的突击作战能力[1]。但潜艇在执行作战任务时,主要依靠自身侦查设备获取战场信息,这些设备作用距离较近,使用时易暴露目标,使潜艇作战半径受到限制[2]。为提升潜艇作战效能,潜艇应当融入战场信息网络,具备与空天地形成一体化的协同作战(CE,Cooperative Engagement)能力。
协同作战是指战斗群中各战斗单元以极短的延时共享其他单元获取的目标信息,发射武器对目标进行攻击,协同抵御各目标的威胁[3]。随着自主式水下航行器[4](Autonomous Underwater Vehicle,AUV)的发展,尤其是潜射无人机(Submarine-launched Unmanned Aerial Vehicles,SUAV)的出现,使得这些无人平台与潜艇协同执行作战任务成为可能。
2 无人机支持潜艇协同作战的数据链体系结构
潜艇在执行作战任务时,无人机可作为一种场外传感器为其提供所需的战场信息。无人机可在敌反潜体系外发射,具有体积小、隐身性能好、航程远的特点[2]。其机载设备可覆盖较广的区域,可扩大潜艇的搜索范围,延长预警时间,提升潜艇的战场感知能力。建立潜艇与无人机间的信息链接,是潜艇能否实现与空中单元协同作战的关键。
数据链是现代信息技术与战术理念相结合的产物,是为了适应机动条件下作战单元共享战场态势和实时指控的需求,采用标准化消息格式、高效组网协议、保密抗干扰数字信道而构成的一种战术信息系统[5]。以实现协同作战为前提,以提升作战效能为需求,数据链可将潜艇与无人机平台链接起来形成一个有机整体。支持潜艇协同作战的数据链体系结构如图1所示。
2.1 数据链装备
数据链装备是数据链功能和技术的物化载体。为实现战场信息和控制指令的收发,无人机以及潜艇等数据链节点应装载数据链装备,它的一般工作过程是:数据处理系统将无人机获取的战场信息转换为数据链标准格式,经过接口处理转换后,由端机按照组网通信协议处理,最后通过数据链终端完成发送;接收方(可以为一个或多个)由其端机接收到信号后,由端机按组网通信协议进行接收处理,在经过接口处理及转换后,由数据处理系统进行格式化消息的解读。
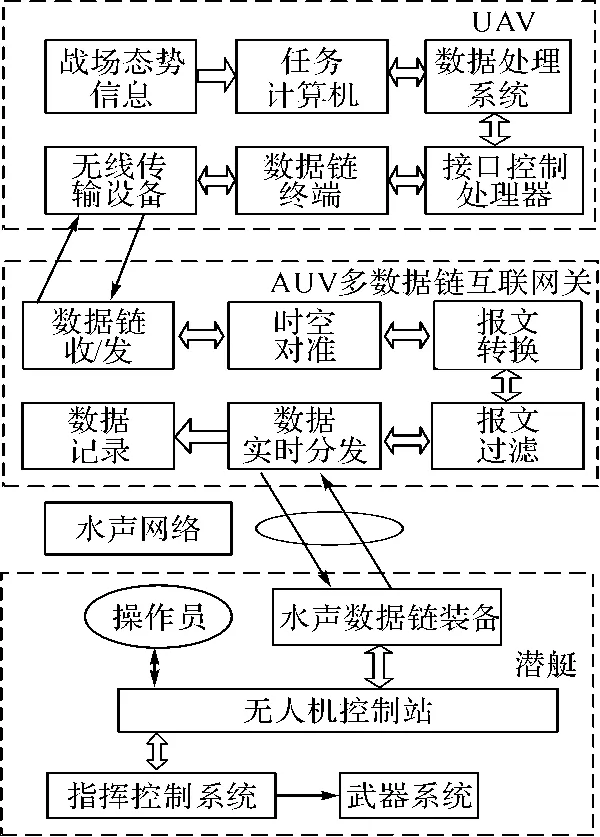
图1 多数据链互联体系结构
2.2 水声网络
水声网络是基于声信号的无线通信网络,由水声数据链将水下节点(包括AUV、潜艇、水下传感器节点等)有机联合,是战场信息在水下空间的传输链路[6]。水声数据链可使潜艇在安全深度完成通讯,以保证潜艇战场生存能力和对敌打击的突然性。
2.3 AUV多数据链互联网关
潜艇与无人机之间的信道涉及海水和大气两种传输介质,导致两者之间存在多种数据链互联互操作问题[7]。AUV多数据链互联网关起到“翻译器”的作用,支持不同种类数据链终端的接入,主要实现报文格式转换、报文过滤、时空对准、冲突消解和状态监视等功能。
2.4 无人机控制站
无人机控制站是潜艇实现对无人机控制的一套软硬件组件,在提供高效的无人机信息分发管理的同时,与指挥控制系统共享战场态势信息,直接支持作战单元的作战行动。
3 无人机控制站设计
3.1 控制站功能
借鉴以支持和实现联合无人机作战概念为主要目标的美国国防部(DOD)战术控制系统[8](Tactical Control System,TCS),无人机控制站的作用在于对无人机战术任务的控制。具体功能如下:
1)实现无人机与潜艇作战指挥控制系统间的互联互通;
2)根据需要调整无人机姿态与航路,支持任务规划与指挥控制功能;
3)战场信息融合及战场态势生成;
4)无人机载荷状态的监视与管理。
3.2 控制站功能逻辑结构
无人机控制站是链接无人机平台和作战指挥系统的桥梁,贯穿于作战任务的全过程。无人机控制站接受作战任务后将任务分解为无人机载荷任务和通信任务,并完成无人机平台的航路规划;在战术任务执行过程中,监视无人机载荷和数据链工作状态,接收多无人机系统传回的战场信息,融合处理后生成战场态势图像,若有需要也可对任务进行重规划;战术任务完成后,分析任务执行情况提交任务完成报告。无人机控制站采用基于接口的模块化设计,图2为功能逻辑结构图。
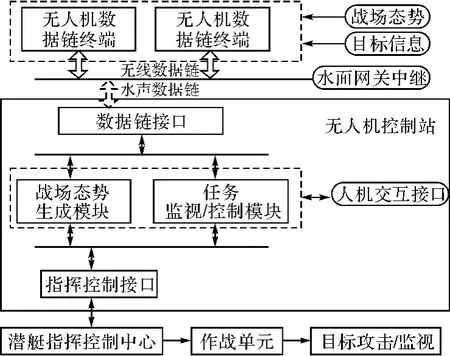
图2 无人机控制站功能逻辑结构
数据链接口提供标准的信息格式,实现无人机控制站与无人机之间的互通;人机交互接口通过控制面板实现操作员与无人机控制站的互动;指挥控制接口提供连接情报信息层、指令层、应用层的桥梁,可使潜艇指挥控制系统接收并分析战场态势信息和目标状态信息,支持作战单元对目标的打击与监视。
4 多无人机系统描述
4.1 多无人机系统功能需求
多无人机系统(multi-UAV system)是指构成多无人机系统的无人机、控制站以及其它实体之间逻辑上和物理上的信息关系、控制关系和时空分布模式[9]。多无人机系统需要通信链路的支持,应当具备一定的智能性与自主性。根据战术任务的不同,多无人机系统功能应满足如下需求:
1)自组织能力。由于操作员数量有限,以及应对通信中断等突发情况,多无人机系统应具备一定的自组织能力;
2)交互性。与无人机控制站的交互可使多无人机系统获得战术任务的授权与确认;
3)支持动态任务。针对不断变化的战场态势,多无人机系统可根据无人机控制站指令完成战术任务重规划;
4)开放性。当系统成员因战斗损失或故障退出时,或者有其他成员加入时,系统能够保持正常运行。
4.2 多无人机系统工作流程
多无人机系统的工作流程是无人机平台在通信链路的保障下,实现战场信息共享及协作完成战术任务的协同过程[11]。多无人机系统工作流程如图3所示,数据链支持多无人机系统的信息交互与指令接收。其中信息流是对战场环境的感知与理解,指令流是无人机控制站所下达的指令信息。
4.2.1 态势生成模块
多无人机平台接受无人机控制站预装订任务后活动在指定区域,利用自身传感器完成战场态势的初步生成并不断更新战场态势。战场态势具体包括目标信息,地图和地形数据采集、气象数据采集、态势评估、威胁估计、态势理解等,这些初步的战场态势信息需要传回无人机控制站,进一步处理后生成近实时的战场态势图像。
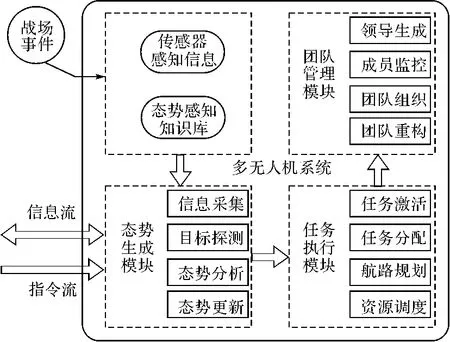
图3 多无人机系统工作流程
4.2.2 任务执行模块
无人机控制站通过数据链现场激活任务,多无人机系统对任务进行分解与细化完成任务分配;通过航路规划与资源调度,在满足战术任务需求的前提下,合理配置多无人机系统资源,实现不同无人机平台传感器及其他设备功能上的互补式配置。
4.2.3 团队管理模块
团队管理模块是将多无人机系统分成若干呈递阶结构的无人机团队和子团队,是对战术任务细化后的具体执行。团队由团队领导和普通成员组成,是自上而下的分层式结构,团队领导协调成员行为并负责团队公共事务的统一管理,并完成与上下级无人机团队的通信和指令下达。
4.2.4 对水面目标攻击的协同作战应用研究
潜艇协同多无人机系统对水面目标攻击是一种时域、空域与频域协同的典型作战行为,作战任务想定如图4所示。作战步骤如下:
1)节点t1:无人机控制站接收岸基/潜艇指控中心或其他上级所下达的任务后,初步装订战术任务,调试水面AUV网关,建立与多无人机系统的水声/无线数据链链接,部署多无人机系统至巡航区域;
2)节点t2:无人机控制站监控无人机平台航行、任务载荷及战术数据链状态,并搜集战场态势信息,由无人机控制站处理融合后生成战场态势图像;
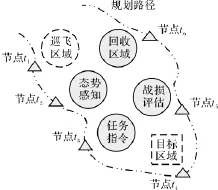
图4 典型作战任务想定图
3)节点t3:无人机控制站对多无人机系统下达指令激活作战任务,根据多无人机系统对作战任务的分解与细化,由若干无人机团队有效协作执行,并将目标信息与战场环境信息传回无人机控制站。多无人机系统团队协作体系结构如图5所示;
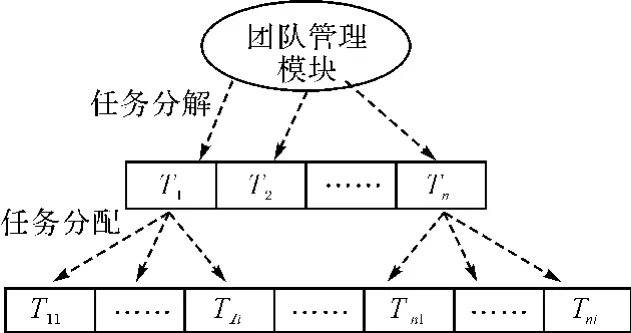
图5 协同任务分配体系结构
4)节点t4:决策者下达攻击决策完成目标打击。攻击决策是一个动态的过程,需要对战场态势的不断决策,保证战场信息的完备性、准确性与时效性,以获得最大的作战效能;
5)节点t5、节点t6:攻击完成后,多无人机系统及时将战损评估信息传回无人机控制站,最后返航至预定区域降落回收。
5 结语
为实现多无人机系统与潜艇的协同作战,本文设计了无人机控制站功能逻辑结构,探讨分析了基于战术任务的多无人机系统战场功能实现,最后从实际作战使用出发,给出了一种较为典型的协同作战模式,并分析其作战流程。从文中可看出,潜艇与无人机平台的信息交互是实现潜艇协同作战的关键,下一步应重点研究潜艇协同作战信息时效性需求以及典型作战模式的详细战术信息分发流程。
[1]侯博,蒋峰.潜空导弹作战效能研究[J].海军航空工程学院学报,2010,25(1):101-104.
[2]谭红明,邓海强.潜射无人机发展现状及其关键技术[J].南京航空航天大学学报,2009,41(12):1-5.
[3]胡洪宁,周德超,刘忠.基于水声传感器网络的隐蔽协同攻击模式研究[J].计算机与数字工程,2011,29(11):85-88.
[4]綦辉,蔡云祥,宋裕农.基于UUV支持的水下协同作战研究[J].火力与指挥控制,2009,34(3):96-101.
[5]李宏智.战术数据链的发展与作战应用[J].舰船电子工程,2010,30(4):1-5.
[6]佟盛,张信学.美军水下网络中心战技术发展及设想[J].舰船科学技术,2009,31(2):154-158.
[7]曹方方,刘卫东,李娟丽.基于水下网络的多UUV协同作战效能评估[J].计算机测量与控制,2011,19(6):1397-1402.
[8]王林,张庆杰.支持联合作战的UAS通用地面控制站研究[J].系统仿真学报,2008,20(22):6171-6175.
[9]袁利平,陈宗基.一种新型多无人机系统体系结构的设计[J].系统仿真学报,2008,22(22):6137-6141.
[10]胡洪宁,周德超,刘忠,等.基于水声传感器网络的隐蔽协同攻击模式研究[J].计算机与数字工程,2011,39(11).
[11]姚宗信,李明,陈宗基.多机协同作战任务决策方法多智能体结构框架[J].电光与控制,2008,15(3):1-4.
