多层曲面仿生复眼成像系统的设计
2013-10-15邹成刚张红霞张以谟
邹成刚, 张红霞, 宋 乐, 范 阳, 张以谟
(天津大学 a. 精密仪器与光电子工程学院; b. 光电信息技术教育部重点实验室;c. 精密测试技术及仪器国家重点实验室, 天津 300072)
0 引 言
随着光学成像系统应用领域的不断拓展, 人们对其性能指标的要求也不断提高, 诸如一些监测装置所用的光学系统, 需要同时达到视场角大, 体积小等要求, 这对传统的单孔径成像系统无法实现, 如广角镜头要通过10片以上的透镜组合实现180°的大视场角成像, 这无疑增加了整个系统的体积与重量, 而且这种光学系统的畸变很大, 图像变形严重。
自然界中的生物复眼由成千上万个成像单元构成, 将每个成像单元定义为复眼的一个子眼, 这些子眼排布在一球面或椭球面基底上, 每个子眼对不同方向物空间的成像使复眼拥有较大的视场角[1,2]。不同于单孔径成像系统, 生物复眼属于多孔径成像系统, 通过对多通道子眼图像的融合[3], 可实现大视场角的成像以及对目标物体的实时跟踪[4,5]。而且由于不同方位的子眼对不同方向的物空间进行成像, 整幅图像的分辨率一致。受到生物复眼的启发, 人们提出了一种基于微透镜阵列的仿生复眼成像系统, 如文献[6-9]中提到的平面型仿生复眼结构, 这种形式的复眼透镜能达到的视场角很小, 失去了复眼大视场的特点, 因此, 很难得到广泛应用。为了提高仿生复眼的视场角, 研究人员提出了与生物复眼更加近似的单层曲面型仿生复眼透镜, 如文献[10]与文献[11]所述的通过在一曲面基底上分布微透镜阵列的形式扩大复眼透镜的视场角, 这种形式的复眼透镜虽然增大了整个复眼的视场角, 但仍然存在着一些问题: 一方面是曲面微透镜的加工是一个难点, 因为单个微透镜的视场角很小, 为了获得较大的视场角, 曲面基底上微透镜的个数很多, 这给加工带来了很大的困难; 另一方面, 在系统结构设计上也存在着一些问题, 由于目前的图像探测器均为平面结构, 而曲面复眼透镜是在一曲面基底上分布微透镜阵列, 各微透镜的光轴与图像探测器间存在着一个夹角, 越靠近曲面基底边缘的微透镜, 此夹角的角度越大, 而此夹角的存在会使微透镜的成像质量降低, 如果以微透镜中心视场清晰对焦, 边缘视场就会出现不同程度的离焦, 严重影响微透镜的成像质量, 降低图像的清晰度[12]。这两方面的原因使这种结构的曲面仿生复眼很难进一步扩大视场角。
针对上述问题, 笔者提出一种多层曲面仿生复眼结构, 通过多层透镜组合扩大子眼的视场角, 利用7个子眼通道即可实现180°范围的成像, 有效降低了曲面基底上微透镜的个数。每个子眼通道包含4层微透镜以及一个图像探测器, 各子眼通道独立地对其视场范围内的光线进行成像, 避免了曲面基底边缘的微透镜成像质量下降的问题。对各个子眼进行优化设计, 使每个子眼通道在其视场范围内获得较高的成像质量。成像实验表明, 这种结构的仿生复眼能实现180°的成像。此外, 通过超精密车削加工技术制作此微透镜阵列是可行的, 而且易于单层曲面复眼透镜的制作[13]。
1 总体结构设计
整个仿生复眼子眼通道的排布方式如图1所示, 在一球面基底上, 以一个子眼为中心, 其余6个子眼环绕排布在中心子眼外圈, 这6个子眼的中心点恰好是一正六边形的6个顶点。外圈6个子眼的光轴与中心子眼光轴的夹角为θ, 不同的子眼以一个固定的视场角2ω对物方空间成像(见图1a)。由于子眼数目较少, 要想实现180°的成像, 每个子眼承担的视场角很大, 根据几何关系可以得到, 当外圈子眼和中心子眼的夹角θ与子眼的半视场角ω满足关系式
(1)
整个复眼的最大视场角才能达到180°。
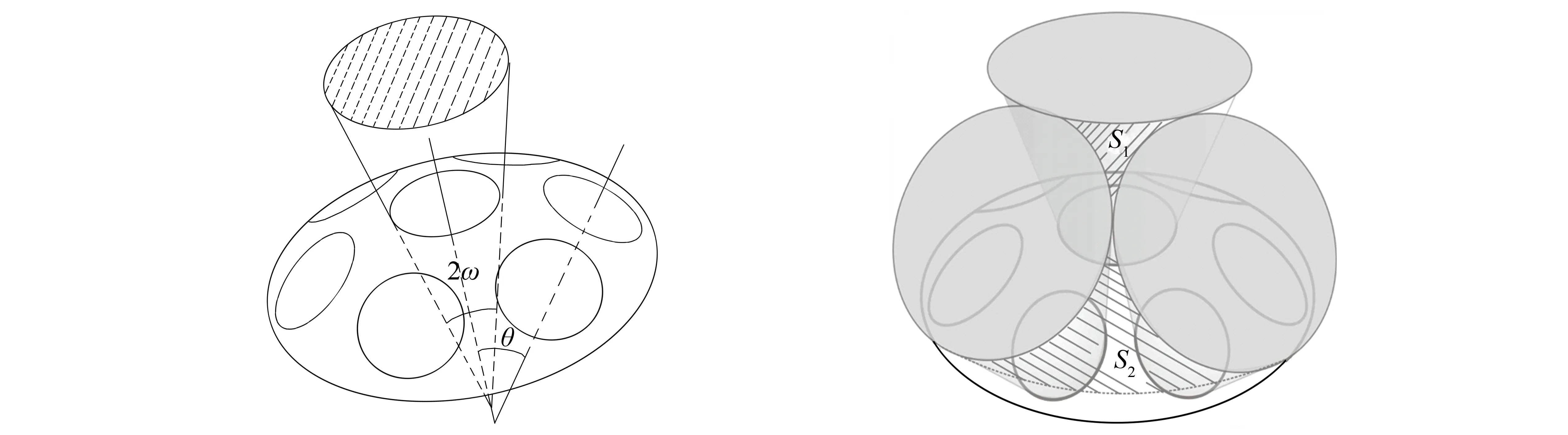
a 子眼参数 b 成像盲区示意图
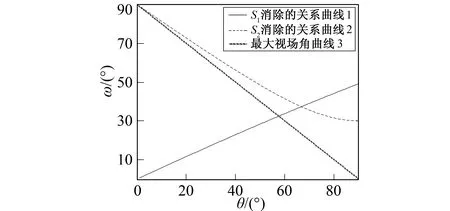
图2 ω与θ的关系曲线
如图1b所示的各子眼通道视场角在物方的涵盖区域可看到, 这种排布方式下各子眼间的成像区域存在盲区, 即各子眼的视场范围均无法对这一区域成像。如图1b中阴影部分所示, 子眼之间的成像盲区主要分成两部分: 1) 中心子眼与外圈的两个子眼间的成像盲区, 称之为盲区S1; 2) 当复眼的最大视场角达到180°时, 外圈两子眼间的成像盲区, 称为盲区S2。盲区的存在会造成物方图像信息的丢失, 因此必须消除盲区。为此, 必须合理设置各子眼的位置以及选择合适的子眼视场角, 使仿生复眼系统的总视场角能达到180°, 且无成像盲区。
如图2所示, 盲区的大小与各子眼间光轴夹角θ以及子眼的视场角2ω有关, 改变两数值的大小可使盲区变小甚至为零。取仿生复眼的物距大于200 mm, 根据计算, 当3个子眼通道之间的成像盲区为零, 即盲区S1消失时, 子眼的视场角与子眼间光轴夹角之间的关系为
(2)
当边缘6个子眼在180°的视场方向上的盲区为零时, 即盲区S2消失时, 可得到子眼半视场角与子眼间光轴夹角之间的关系为
(3)
根据式(1)~式(3)给出了子眼半视场角ω以及中心子眼与外圈子眼间夹角θ的MTF(Modulation Transfer Function)关系曲线(见图2)。为了使多层曲面复眼的最大视场角达到180°,ω与θ的值必须取在曲线3的右上方或是曲线3之上, 而为了消除子眼物方视场的盲区,ω与θ的值必须同时满足曲线1与曲线2。从图2可看到, 曲线1与曲线2存在一交点, 这一交点恰好在曲线3的右上方, 根据前面分析可以得到, 此交点即其值使复眼在整个180°范围内成像而无盲区的点。由式(2)、式(3)联立可求得此交点的值为ω=37.25°,θ=66.8°。所以当多层曲面仿生复眼的子眼视场角2ω=74.5°, 中心子眼与外圈子眼的光轴夹角为θ=66.8°时, 整个仿生复眼结构在180°范围内成像不存在盲点。
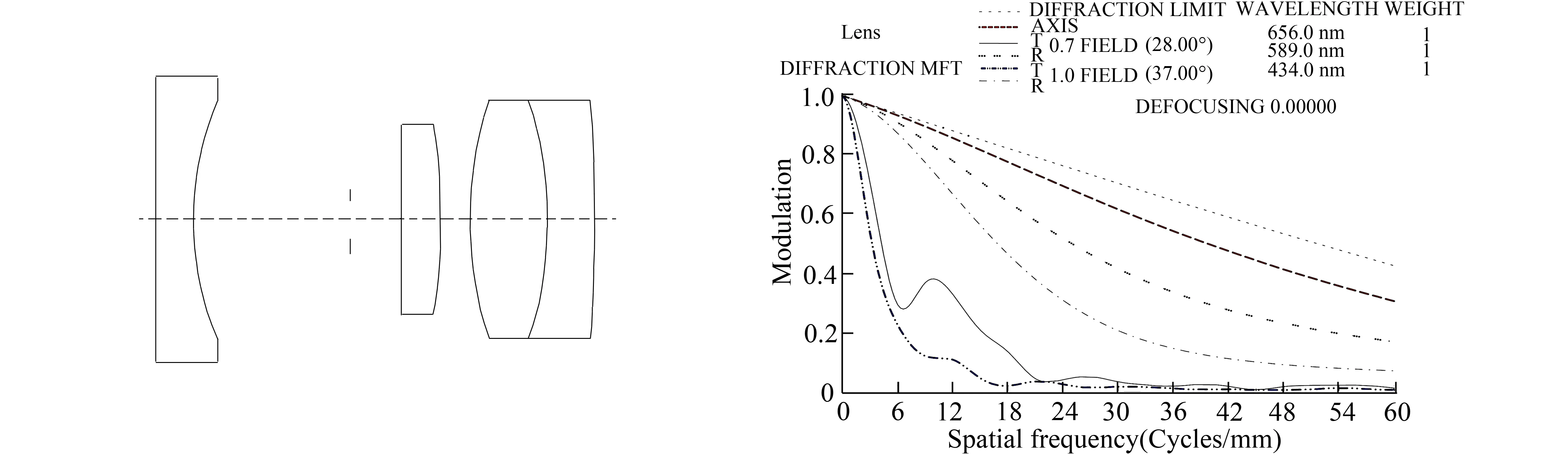
a 初始结构 b 初始结构MTF曲线
2 单通道子眼的设计
为获得高的成像质量, 必须对单个子眼进行优化设计, 根据前面的分析可知, 每个子眼所承担的视场角为2ω=74.5°, 选用CCD(Charge-Coupled Device)图像传感器接收图像, 根据CCD尺寸及像元大小可得到子眼成像的最大像高为3 mm, 分辨率为60 lp/mm。由物镜的成像特性可知, 子眼的视场角、 焦距以及像高之间的关系为
y′=f′tanω
(4)
可得到子眼的焦距为3.95 mm。由于子眼的视场角很大, 用一个单透镜实现这么大的视场角非常困难, 所以采用多片透镜组合实现子眼大视场角的成像。根据各设计技术指标, 选择合理的初始结构进行优化设计, 采用图3a所示的初始结构, 为满足设计要求, 使用0°、26°、37° 3个视场角进行设计, 从图3b的MTF曲线可看出, 该组透镜的成像质量很差, 需要对其进行优化设计。
为使子眼达到使用要求, 结合CODE V软件对透镜的优化功能, 对所选的初始结构进行优化设计, 最终得到的仿真后的像质评价如图4所示。从图4a可看到, 各视场的MTF曲线接近衍射极限, 在空间分辨率为60 lp/mm时, MTF均大于0.6, 所得结构的综合性能较好; 从图4b可看出, 各视场的点列图弥散斑均在艾利斑以内, 成像质量满足使用要求。

a MTF曲线 b 点列图
3 多层仿生复眼的光线追迹与实验分析

图5 最终的子眼结构
结合所得的MTF曲线和点列图可知, 优化后的结构满足复眼成像的使用要求。得到的最终结构如图5所示, 整个子眼通道由4片彼此分开的透镜以及1片图像探测器组成, 视场角2ω=74.5°, 相对孔径为1/5, 各组透镜的面型均为球面或近似球面, 便于加工制造。

a 单层曲面复眼 b 单层曲面复眼光线追迹
为对比, 首先建立并模拟一单层曲面复眼透镜(见图6a)。微透镜的排布方式与多层曲面复眼子眼通道的排布方式类似。取最中间的一列微透镜进行光线追迹(见图6b), 由于两侧微透镜阵列关于主光轴对称, 所以, 只取主光轴一侧的10个微透镜进行光线追迹。对每个微透镜中心视场以及±1.5°视场进行光线追迹。可看到, 边缘子眼的光线出现不同程度的离焦, 使微透镜的成像质量严重下降, 而且越靠近曲面边缘的子眼这种情况越严重, 使单层曲面复眼的视场角难以继续增大。此单层复眼的最大视场角仅为60°, 按照图6a的排布方式需要331个子眼微透镜。如需继续增大视场角,则要继续增加子眼的个数, 这对现阶段的加工工艺非常困难, 而且边缘子眼的成像质量会进一步变差。
通过前面的设计分析可知,单个子眼通道在其视场范围内的成像质量已经达到了使用要求, 下面对所设计的多层曲面仿生复眼整体结构进行模型的建立, 如图7a所示, 外圈透镜的光轴与中心透镜的光轴夹角为66.8°, 各层当中相对应的微透镜是同轴的, 通过超精密车削加工的方法在曲面基底的内外两侧加工每个子眼透镜的面型。像面是7片相同尺寸的CCD按照与透镜阵列相同的排布方式拼接, 每片CCD只接收对应子眼通道的图像。第1层透镜阵列后的孔阵列, 一方面作为单个子眼系统的孔径光阑控制单通道子眼的像差, 另一方面可防止相邻子眼间光线串扰的产生。
利用LightTools对所设计的多层曲面复眼进行光线追迹, 建立一半球型光源覆盖整个仿生复眼透镜, 设置其内表面发光, 使其在180°范围内各个方向的出射光线均匀分布, 其模拟结果如图7b所示。可看到, 各接收器上的光能分布基本一致, 无明显差异, 皆符合成像系统成像规律。表1是各探测器上接收到的能量值, 各探测器的能量值相差不大, 说明外圈子眼可接收与中心子眼同样视场角的光线, 仿生复眼的光线接收角度可达到180°, 实现180°范围的成像。

a 多层曲面复眼 b 各图像探测器上能量分布

表1 各探测器接收到的能量值
为验证设计结果, 对所设计的多层曲面仿生复眼进行成像实验, 利用图像采集卡将CCD 接收到的子眼图像传输到计算机并显示在显示器上。将多层曲面复眼放入500 mm×500 mm的方形暗室, 对其内壁进行成像, 多层曲面仿生复眼的各子眼与物面距离均大于200 mm, 可视为无穷远成像。图8为几个子眼通道的成像图, 可看到, 子眼通道2与5可以对仿生复眼两侧的物体进行成像, 而子眼通道3、4也可对复眼上方的物体进行成像, 这说明视场角覆盖整个180°。从成像图中可看出, 任意两个子眼之间的成像均有重叠部分, 这种重叠保证各子眼成像拼接时无盲区存在, 使物方画面完整。各子眼的像质均匀, 无明显差异。
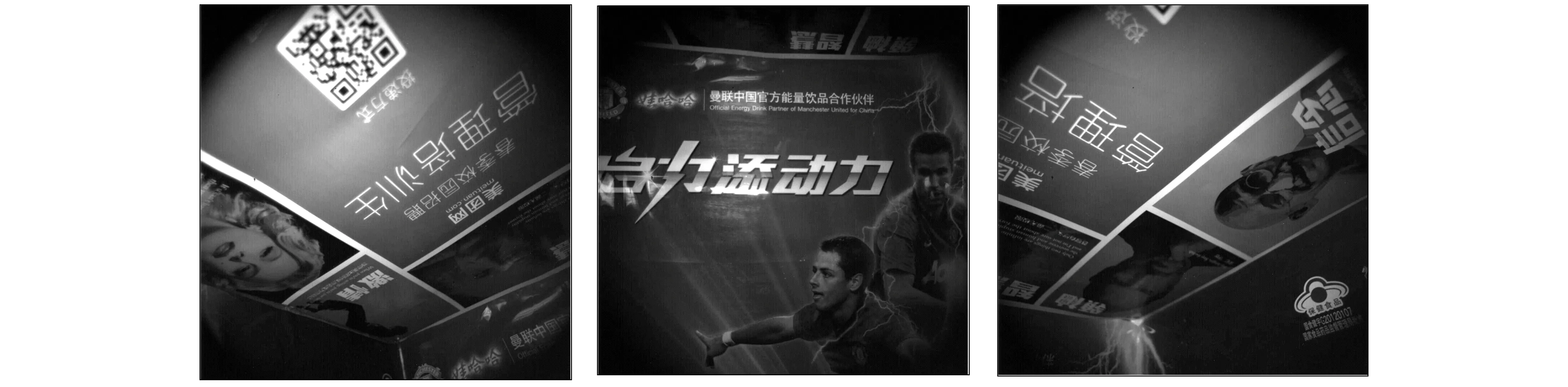
a 子眼通道3图像 b 子眼通道1图像 c 子眼通道4图像
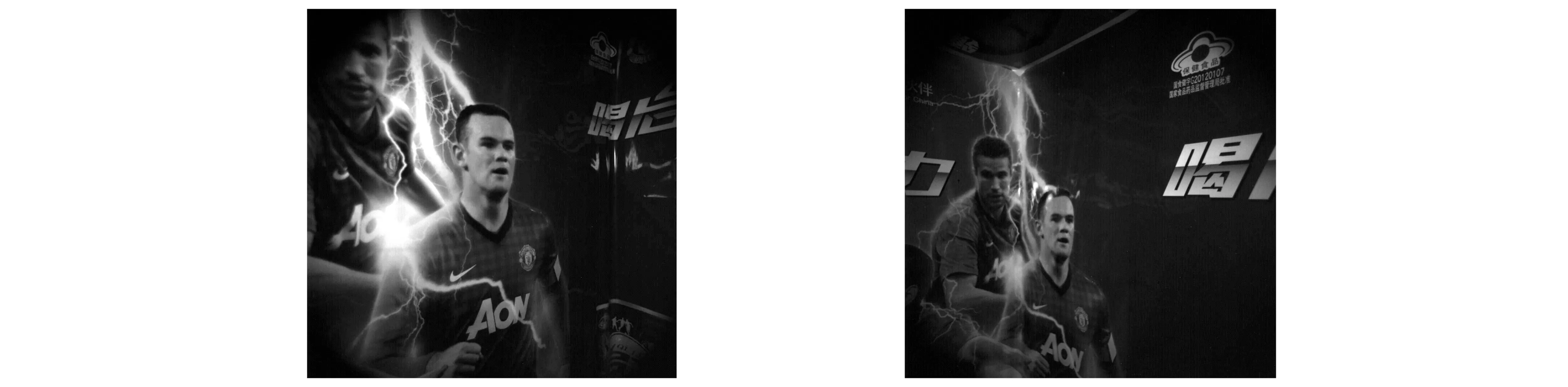
d 子眼通道2图像 e 子眼通道5图像
4 结 语
笔者提出了一种多层曲面仿生复眼成像系统, 通过增加子眼透镜的层数扩大每个子眼所承担的视场角, 降低曲面复眼的复杂度, 以较少的子眼个数实现180°的大视场成像。通过计算合理设置子眼间的光轴夹角以及各子眼的视场角, 消除了子眼间的成像盲区, 保证能获得一幅完整的180°物空间图像。对单个子眼通道进行优化设计, 使其在成像视场范围满足使用要求。光线追迹表明, 该多层曲复眼成像系统可实现180°范围的成像。最后通过成像实验证明这种结构形式的仿生复眼系统的视场角能达到180°, 且无盲点。所得结构简单, 易于加工制造。
参考文献:
[1]HORRIDGE G A. The Compound Eye of Insect [J]. Scientific American, 1977, 273(1): 108-120.
[2]LAND M F. Compound Eyes: Old and New Optical Mechanisms [J]. Nature, 1980, 287: 681-686.
[3]常淑华, 宋艳秋, 杨永敏. 双目立体视觉匹配的预处理技术 [J]. 吉林大学学报: 理学版, 2012, 50(1): 96-100.
CHANG Shu-hua, SONG Yan-qiu, YANG Yong-min. Matching Preprocessing Technology of Binocular Stereo Vision [J]. Journal of Jilin University: Science Edition, 2012, 50(1): 96-100.
[4]JEONG K, KIM J, LEE L P. Biologically Inspired Artificial Compound Eyes [J]. Science, 2006, 312(5773): 557-561.
[5]张博, 申铉京. 一种基于目标定位的背景建模与视觉跟踪方法 [J]. 吉林大学学报: 理学版, 2010, 48(4): 618-623.
ZHANG Bo, SHEN Xuan-jing. Bachground Modeling and Visual Tracking Approach Based on Object Locating [J]. Journal of Jilin University: Science Edition, 2010, 48(4): 618-623.
[6]OGATA S, ISHIDA J, SASANO T. Optical Sensor Array in an Artificial Compound Eye [J]. Optical Engineering, 1994, 33(11): 3649-3655.
[7]JEFFREY S S, HALFORD C E. Design and Analysis of Apposition Compound Eye Optical Sensors [J]. Optical Engineering, 1995, 34(11): 222-235.
[8]JUN TANIDA, TOMOYA KUMAGAI, KENJI YAMADA, et al. Thin Observation Module by Bound Optics (TOMBO): Concept and Experimental Verification [J]. Applied Optics, 2001, 40(11): 1806-1813.
[9]DUPARRE J, DANNBERG P, SCHREIBER P, et al. Artificial Apposition Compound Eye Fabricated by Micro-Optics Technology [J]. Applied Optics, 2004, 43(22): 4303-4310.
[10]张红鑫, 卢振武, 王瑞庭, 等. 曲面复眼成像系统的研究 [J]. 光学精密工程, 2006, 14(3): 346-350.
ZHANG Hong-xin, LU Zhen-wu, WANG Rui-ting, et al. Study on Curved Compound Eye Imaging System [J]. Optics and Precision Engineering, 2006, 14(3): 346-350.
[11]DUPARRE J, RADTKE D. Spherical Artificial Compound Eye Captures Real Images [C]∥SPIE. MOEMS and Miniaturized Systems Ⅵ. USA: SPIE, 2007: 1-9.
[12]邸思, 杜如虚. 单层曲面复眼成像系统的优化设计 [J]. 光电工程, 2010, 37(2): 27-31.
DI Si, DU Ru-xu. Optical Design of Single-Layer Spherical Compound Eye Imaging System [J]. Opto-Electronic Engineering, 2010, 37(2): 27-31.
[13]张效栋, 房丰洲, 程颖. 自由曲面超精密车削加工路径优化设计 [J]. 天津大学学报, 2009, 42(3): 279-282.
ZHANG Xiao-dong, FANG Feng-zhou, CHENG Ying. Optimized Design of Cutting Path for Freeform Surface in Ultra-Precision Turning [J]. Journal of Tianjin University, 2009, 42(3): 279-282.
