面向AUV多学科设计优化的参数化几何建模及其关键技术
2013-10-15宋保维朱崎峰
宋保维,朱崎峰,王 鹏
(西北工业大学 航海学院,西安 710072)
0 引言
自主式水下航行器(Autonomous Underwater Vehicle, AUV)广泛用于海底资源和地质调查、海洋环境测量以及军事用途等。采用多学科设计优化(Multidisciplinary Design Optim ization,MDO)方法可以有效提高AUV总体概念设计的质量,缩短研制周期,引起了国内外AUV设计工作者的广泛关注[1~3]。AUV总体概念设计多学科优化是一个设计参数和几何模型的优化过程,是实现利用CFD和CAE等学科分析工具驱动CAD模型优化更新的过程。传统的AUV几何模型创建方法因无法实现几何模型创建与更新的自动化,不能满足多学科设计优化的要求。
近年来,随着计算机辅助设计技术的发展,基于CAD的参数化建模方法逐渐应用于航空、航天、航海等多个领域[4~6],AUV壳体结构设计也逐渐采用了基于特征参数的参数化设计方法。文献[7]最先开展了AUV壳体的参数化设计研究,基于VC++5.0开发了一个能够集壳体结构建模、结构分析和优化的软件系统,但由于该软件系统是独立开发的,造成与CFD等商用学科分析软件之间没有数据接口,无法进行学科之间的数据交换,各学科也不能利用其参数化几何模型进行数值计算。文献[8]在UG软件平台上进行二次开发实现了AUV壳体结构的快速设计,能够为壳体结构的力学性能分析提供三维几何模型,但无法为流体力学特性、噪声特性、衡重特性等其它诸多性能的分析提供研究对象和需要的几何特性参数,还不能满足AUV总体多学科设计优化系统对参数化几何建模的要求。因此随着AUV总体概念设计多学科优化研究的深入,开展面向AUV总体概念设计多学科优化的参数化几何建模技术研究势在必行[9,10]。
本文在对AUV总体概念设计多学科优化流程中参数化几何建模分析的基础上,研究AUV参数化CAD建模的关键技术,并以通用CAD软件UG为平台,运用VC++和UG/OPEN进行二次开发,实现了面向AUV总体概念设计多学科优化的参数化几何建模,并应用于工程实际中。
1 面向MDO的AUV参数化几何建模方法
1.1 AUV总体概念设计的MDO流程
AUV总体概念设计涉及到多个学科领域,各学科之间相互关联,根据总体设计的各项任务和设计流程,结合多学科设计优化技术,本文将整个AUV总体概念设计划分为流体动力、壳体结构、操稳性、控制导航、动力推进、衡重布局和声学七个学科领域。集成参数化几何建模之后的AUV多学科设计优化运行流程如图1所示。

图1 AUV总体概念设计的MDO流程
从图1可知, MDO中AUV参数化几何建模的主要任务是为流体动力性能分析、结构力学性能分析和声学性能分析提供精确的CAD模型,同时为其它相关学科提供CAD模型的几何特性参数,以用于各学科分析和优化。
1.2 MDO对参数化几何建模的要求
MDO是一个融合多学科知识,在集成不同学科分析工具基础上实现AUV总体优化设计协同仿真的过程,面向AUV总体概念设计多学科优化的参数化几何建模需满足如下要求:
1)AUV参数化几何建模必须能够准确地生成AUV的三维CAD模型,为各子学科分析与优化提供统一的几何模型。
2)AUV参数化几何建模必须能够准确地获得AUV表面面积、内部容积、浮心位置、壳体重量和重心位置能准确的信息,便于各学科分析与优化。
3)在MDO的迭代过程中,用户需要能够仔细地观察几何模型的变化,以尽快发现并解决问题,缩短设计周期。因此参数化几何建模必须在前台运行,并提供给用户查看几何模型的全部权利。
4)UG软件与MDO集成框架之间要实现无缝连接,存储设计参数的文件格式必须能够为MDO集成框架识别,以满足集成框架对设计参数解析和更新的要求。
1.3 面向MDO的AUV参数化几何建模方法
AUV参数化几何模型的核心是采用一组参数来描述AUV模型的几何形状,其几何模型的修改都可以通过对该组参数的处理来进行。计算机根据设计者输入的参数会自动导出精确的几何模型,而不需要人为地重新绘制AUV几何模型,对模型的修改只要改变相应的参数即可。基于AUV三维CAD模型生成技术,实现MDO过程中的参数化几何模型的方法有以下三种:
1)用计算机高级语言专门开发一个能够自动生成AUV三维CAD几何模型的程序,这种方法具有较大的灵活性,但工作量较大。
2)基于MDO框架平台(如AM L等)的参数化几何建模功能,实现三维CAD几何模型自动生成。
3)基于现有CAD软件(如UG、PRO/E等),应用二次开发技术,开发一个能自动生成三维CAD模型的程序。
本文中参数化AUV几何模型采用第3种方法,该方法虽然在灵活性方面受到一些限制,但是具有许多优点:1)CAD软件(如UG)具有很强的曲面生成功能,可以避免重复的曲面生成编程工作;2)CAD软件中生成的三维几何模型能为各种设计部门直接使用,不必进行图形格式的转换;3)CAD软件一般还具有计算几何模型面积和体积等几何特性,这些信息在AUV总体设计中非常重要。
2 MDO中的AUV几何模型
根据参数化几何建模的根本任务,本文将主要研究工作集中于MDO中的AUV概念设计的主体几何模型、鳍舵几何模型和壳体结构几何模型三部分的参数化几何建模上。
2.1 主体几何模型
AUV主体通常为回转体,其几何模型的形状由主体的线型决定。AUV主体线型一般由四段组成:头部曲线段、平行中段、尾部曲线段及尾锥段,具体几何形状和参数如图2所示[11]。

图2 AUV主体线型定义
图中: DF表示AUV头部前端面直径(圆头线型DF=0); LH表示头部曲线段轴向长度;D表示平行中段直径; LC表示平行中段长度; LT表示尾部曲线段轴向长度; DT表示尾部曲线段后端面直径;α表示尾锥半角; LE表示尾锥段轴向长度;DE表示主体后端面直径;L表示AUV总长度。
2.2 壳体结构几何模型
AUV的壳体结构的最基本形式是环肋加强薄壁壳体,壳体结构几何模型主要由壳体厚度、肋骨间距和肋骨横截面几何形状决定。AUV壳体结构采用的环形肋骨根据横截面的形状,可以分为矩形肋骨、Z形肋骨、工字形肋骨、T形肋骨和L形肋骨等。
基于简化模型的需要,本文在肋骨布置方面抛弃以肋骨间距作为控制条件的方案,而以肋骨个数作为控制条件。此外,考虑到头部和尾部壳体的长度远小于平行中段,在壁厚、肋骨间距及工作海况等相同的情况下,其结构强度及稳定性优于平行中段,所以文中在参数化几何建模时头部与尾部的肋骨类型及肋骨间距与平行中段相同。
2.3 鳍舵几何模型
鳍、舵是AUV的稳定面和操纵面,其几何模型的形状由鳍舵剖面几何形状、平面几何形状及尺寸大小、和布局方位决定。典型的鳍舵平面几何形状和布局方位如图3所示。
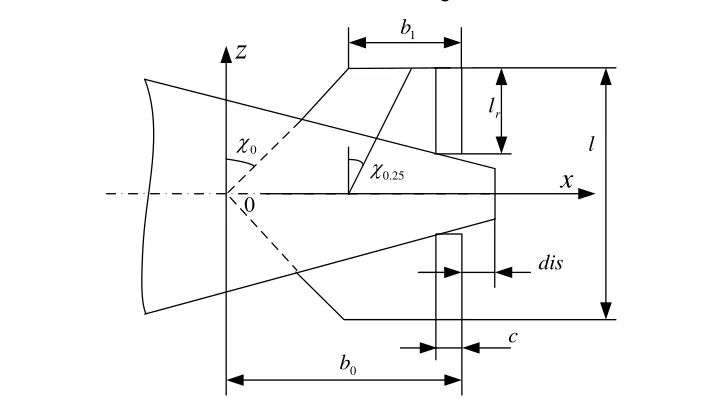
图3 鳍、舵平面几何形状定义
3 几何建模关键技术
3.1 结构特征关联
对AUV几何模型的结构分析表明,由于组成部件的几何特征不同,采用的建模方法也不同。针对AUV几何模型复杂的结构,为便于参数化几何模型的建立和修改,AUV的CAD模型采用各部件分块建模,并通过布尔运算连接成整体几何模型的方法。该方法能够方便、灵活地构建特征模型,但需要解决各部分之间的特征关联等关键问题。

图4 特征关联示意图
特征的关联在结构上表示为部件结构的大小、位置及相互连接的关系,在参数值上则表现为部件之间尺寸关联性。针对AUV几何模型的特征,文中应考虑的特征关联关系主要存在于AUV各段壳体、鳍、舵和肋骨之间,各部分之间的特征关联关系如图4所示。在AUV几何模型构建过程中,本文采用共用特征线、特征点或已构建特征的轮廓线来实现不同部件之间特征的关联。
3.2 特征曲线控制
为便于参数化特征的建立和修改,文中采用3次非均匀有理B样条(Non-Uniform Rational B-Splines, NURBS)曲线作为AUV主体几何模型的控制特征线。主体线型的每条NURBS控制线由若干点控制,每个控制点根据曲线要求控制其位置变化的方向和范围。这样既能保证模型顺利地建立与修改,又能得到丰富的形状变化。AUV主体线型的NURBS样条曲线包括头部曲线段样条曲线和尾部曲线段的样条曲线,尾部的样条曲线整体曲率较小,采用均匀分布的控制节点即可轻松构造出理想的样条曲线来逼近真实的主体线型,而头部线型曲线则不同,其临近前端面的一部分曲线曲率变化很大,靠近平行中段的部分曲率变化较小,若利用均布控制节点构建样条曲线就会失真,无法正确地描述雷头的真实线型变化。
为明显地表示控制节点的变化对曲线形状的影响,假定该B样条曲线有11个控制点。其中曲线的端点1和11通过雷体的整体尺寸控制,轴线位置的x坐标和径向位置的y坐标固定;点2~10的轴向坐标x可以通过节点生成函数进行控制,y坐标可以经过线型函数关系式随控制点的x坐标值的调节而变化。通过调节控制点2~10的x坐标,能够较好地改变曲线的形状,同时保证样条曲线光滑连接的关系。图5所示为坐标点位置调节前后的AUV头部几何模型的控制曲线。

图5 AUV头部特征曲线的控制
3.3 肋骨类型的转换
AUV壳体结构采用的环形肋骨类型通常有矩形、L型、Z字型、T字型和工字型等,在不同的肋骨类型中,工字型肋骨的结构形式最为复杂,横截面几何尺寸参数也最多,共需要8个参数,分别为1l、2l、3l、4l、 1d、 2d 、 3d、 4d 。经过对不同形式肋骨的比较和分析可知,在工字型肋骨基础上,仅需要对各个参数的调整即可以衍生出其它形式的肋骨,如矩形肋骨、T型肋骨、L型肋骨和Z字型的肋骨等。这种方法极大地简化了肋骨几何建模的复杂性,并有利于肋骨几何模型特征设计参数的提取。例如将工字型肋骨横截面几何参数中2 3l l、置为0,则可以得到Z字型肋骨,如图6所示。
3.4 曲线段壳体肋骨建模
因为AUV的头部和尾部是流线型,所以肋骨横截面的几何形状不同于平行中段,在靠近壳体的一端变成了曲面,头部曲线段壳体的剖面几何形状如图7所示。考虑到各段壳体采用相同的肋骨,所以建立头部和尾部肋骨几何模型的关键是确定肋骨横截面的型值点坐标。

图7 头部肋骨的横截面
由图7可知,如果能够确定型值点F和C两点的坐标,根据这两点的坐标,引入平行中段肋骨的横截面几何参数,就可以确定头部和尾部肋骨横截面其余的型值点坐标。
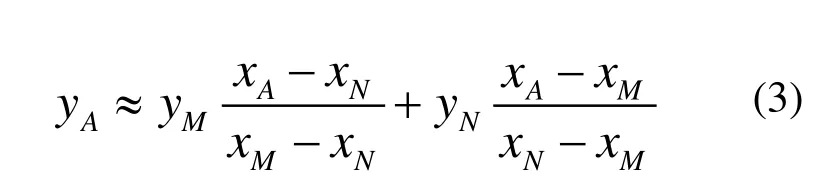
型值点F和C的坐标可以通过头部曲线上轴向坐标相同的A点和B点求出,A(xA, yA)和F(xF, yF)之间、B(xB, yB)和C(xC, yC)之间存在几何关系如下:

由于头部曲线的型值点坐标已经由线型方程确定并输出到型值点文件中,所以本文计算A点和B点坐标的方法是通过选取A点(B点的计算方法相同)附近的两个型值点M(xM, yM)和N(xN, yN)进行插值求出点A纵坐标的近似值(如图7所示),用以替代精确坐标值,然后再计算出F点的纵坐标。文中采用拉格朗日插值法来计算A点的纵坐标近似值,为尽可能减小插值方法的误差,可以对曲线段的型值点进行加密处理。
计算型值点A纵坐标的拉格朗日插值多项式如下:
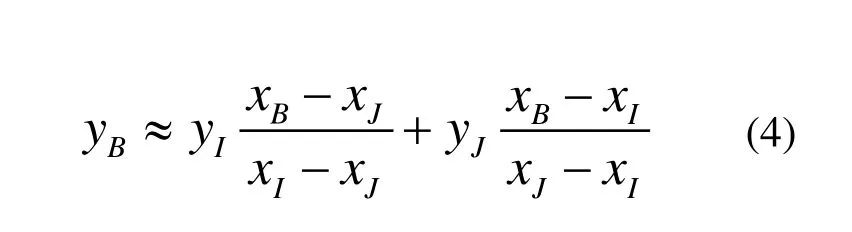
计算型值点B纵坐标的拉格朗日插值多项式如下:
3.5 冗余特征参数处理
AUV参数化几何建模是基于特征参数进行的,特征参数的提取的合理性是AUV参数化几何建模成功与否的决定性因素。AUV特征参数的提取建立在对AUV的几何模型分析的基础上,同时要考虑到模型几何参数的相关性,避免冗余参数的出现。文中的AUV几何模型存在着三组相关参数:1)主体的轴向总长度和各分段轴向长度之间的相关;2)尾部曲线段后端面直径、尾锥段轴向长度、AUV尾锥段后端面直径和尾锥半角之间的相关;3)通常AUV鳍、舵后缘后掠角为直角,因此鳍舵根弦长、梢弦长和前缘后掠角之间存在相关。在每组参数中,有一个参数为冗余参数,在提取特征参数时应基于AUV设计的要求剔除该参数。
在设计AUV过程中,由于头部、平行中段和尾部曲线段主要用来安装内部组件,应保证有足够的内部容积,因此其头部长度、平行中段长度、尾部曲线段长度和尾部曲线段后端面直径由设计任务书提出要求,在一定范围内取值;此外,AUV与发射装置之间应能够兼容,因此AUV的平行中段直径和总轴向长度也是由设计指标预先确定的。因此AUV主体几何模型的几何参数中,尾锥段长度和尾部曲线段后端面直径为冗余参数,予以剔除。
由于鳍舵的流体动力性能取决于主体外鳍舵的面积、轴向长度和前缘后掠角,因此鳍舵的梢弦长和前缘后掠角是主要关注的参数,根弦长可以作为冗余参数,予以剔除。
4 功能实现
根据AUV是具有曲面外形和环肋加强薄壁结构的特点,以及特有的设计方法与流程,本文选择UG NX7.0作为二次开发平台,以内部模式创建参数化几何建模的应用程序。UG NX 7.0提供了功能强大的二次开发模块UG/OPEN API,使用该工具可以开发出基于UG系统的应用程序,实现其他软件和UG的无缝集成,满足用户的特定要求[12]。
4.1 创建VC++工程
本文利用UG提供的应用程序向导UGOpen.aw x实现内部模式程序框架的构造,该向导包括V 18和NX两个版本,操作简单,运行稳定,可以快速构建开发体系,其生成的DLL文件可以在UG NX7.0下运行。工程中具体的关键设置如下:
1) 创建VC++工程,在应用程序向导的项目列表中选择“Unigraphics NX AppW izard V1”,并选择应用程序类型为“An internal application that can be activated from a Unigraphics session(dll)”,创建一个DLL(动态链接库)工程。该工程的编译结果是一个规则DLL,将以内部模式在UG中运行。
2)修改工程设置。打开“ProjectSettings”对话框,找到“L ink”选项卡,在“Ob jec t/library module”编辑框中添加“libufun.lib”、“libugopenint.lib”和“libvmathpp.lib”三个库文件。
3)在工程中添加UG应用程序的入口函数ufsta、卸载函数ufusr_ask_unload以及相应的UG/OpenAPI头文件。
4.2 实例验证
西北工业大学水下航行器研究所基于多学科设计优化技术和计算机技术的研究成果,开发了面向AUV总体概念设计的多学科优化集成平台-AUVMDOP(AUV concept multidisciplinary design optim ization integrated platform),解决了长期以来AUV多学科设计优化缺少计算平台支撑的困境。AUVMDOP中集成了基于UG NX7.0的AUV参数化几何建模模块,实现了AUV几何模型的自动更新,能够为CFD和FEA提供精确统一的分析对象,并为其它学科分析提供必要的AUV几何特性参数。
AUVMDOP启动优化程序后,系统会调用并运行UG NX7.0软件,UG软件自动加载以内部模式开发形成的AUV参数化几何建模动态链接库文件Torpedo_UG.dll,实现几何模型的更新,如图8所示。

图8 UG NX7.0自动运行DLL的过程
限于篇幅,本文在此处仅给出两个优化后的AUV实例:AUV-A和AUV-B。AUV-A的最大直径为533.4mm,长度为7000mm,头部采用格兰韦尔双参数平方根多项式圆头线型,尾部采用格兰韦尔平尾线型,肋骨模型采用T型肋骨;AUV-B的最大直径为324mm,长度为2790mm,头部采用格兰韦尔双参数立方多项式平头线型,尾部采用格兰韦尔尖尾线型,肋骨模型采用L型肋骨。AUV几何模型的主要几何特性参数如表1所示。

表1 AUV几何模型的特性参数
5 结论
本文基于AUV总体概念设计多学科优化对参数化几何模型的要求,分析AUV的参数化几何模型特征,确定了建模的方法和流程,并以UG NX7.0为平台进行二次开发,运用Visual C++6.0工具,深入到UG系统内部,创建了AUV参数化几何建模的应用程序。本文中参数化几何建模的方法具有如下特点:
1)该方法满足AUV总体概念设计对参数化几何建模的要求,不仅可以导出学科分析几何模型,也可以准确地计算模型的几何特性,可以集成到多学科设计优化平台中,推动AUV多学科优化计算环境的发展。
2)针对AUV的几何模型特征,在CAD建模过程中解决了特征曲线控制、肋骨转化、冗余参数处理、曲线段壳体肋骨建模等关键技术。
[1] FITZGERALD C J, WESTON N R, PUTNAM Z R, et al.A conceptual design environment for technology selection and performance optim ization for torpedoes [J]. // the 9th AIAA/ISSMO Symposium on Multidisciplinary Analysis and Optim ization, A tlanta, Ga, USA, September 2002,AIAA 2002-5590.
[2] 李学斌,甘霖.AUV总体概念设计中的多学科和多目标优化研究[J].海洋技术,2008,27(2):77-82.
[3] S. Jung,J.Yun and N. Lee. Shape and Thickness Optimization of End Cap Structure of Hanwha AUV w ith MDO-Like Procedure[J]. Korea Unmanned Underwater Vehicle, 2011, pp:37-41.
[4] Juan J.A lonso, Joaquim R. R. A. M artins, James J.Reuther, et al. High-Fidelity Aero-Structure design using a parametric CAD-Based method[J]. AIAA2003-3429.
[5] Wang Hongqing, David W. Rosen. Parametric modeling method for truss structures[C]. // 2002 ASME Design Engineering Technical Conferences, Montreal, 2002:1-9.
[6] Yang Y S, Park C K. A Study on the Prelim inary Ship Design M ethod Using Determ inistic Approach and Probabilistic Approach Including Hull Form[J]. Structure Multidisciplinary Optim ization,2007,33:529-539.
[7] 余绍勇. 鱼雷壳体的参数化设计[D]. 西安:西北工业大学航海工程学院,2001.
[8] 万欣,郑国磊,尹韶平,等.鱼雷壳体快速设计[J]. 舰船科学技术,2006, 28(4): 55-57.
[9] 何杰,刘津,李春雨. 多学科优化设计技术在现代AUV设计中的应用展望[J]. AUV技术,2007,15(2):12-14.
[10] 王鹏,宋保维,尹韶平,毛昭勇.鱼雷总体多学科设计优化技术研究进展[J]. 鱼雷技术,2008,16(4):1-4.
[11] 张宇文.鱼雷外形设计[M].西安:西北工业大学出版社,1998.
[12] 莫蓉,常智勇,刘红军,等.图表详解UG NX二次开发[M].北京:电子工业出版社,2008.
